
登录注册
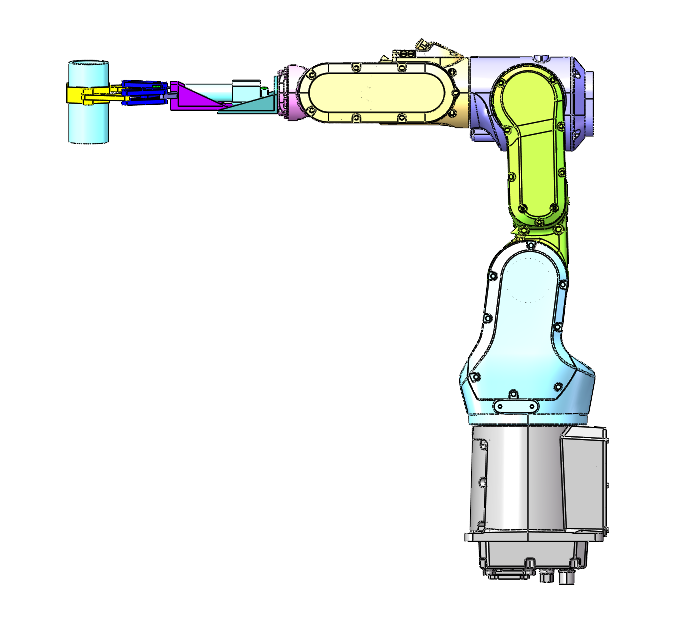
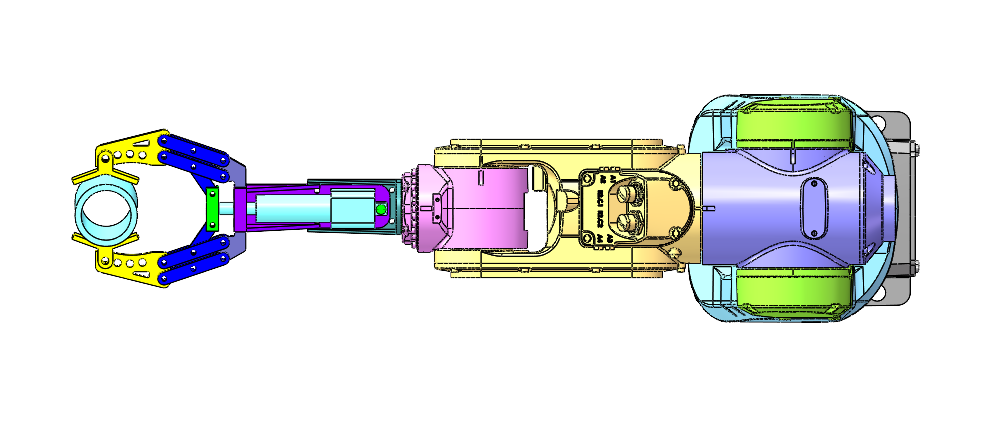
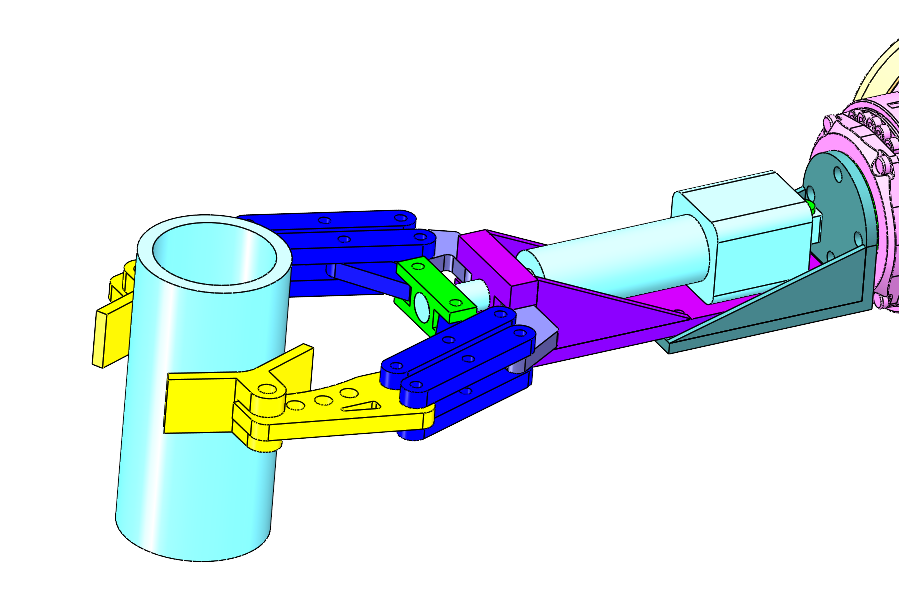
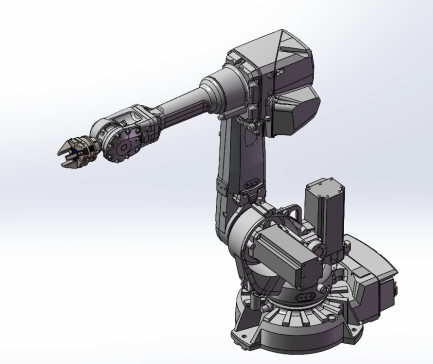
多自由度物料夹持机器人(ID:1230288)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1.SLDPRT | 22.56K |
| 2 | 17122243431981.zip | 25.89M |
| 3 | additional.SLDPRT | 24.15K |
| 4 | center.SLDPRT | 32.00K |
| 5 | cylinder.SLDPRT | 17.80K |
| 6 | DB1.SLDPRT | 1.93M |
| 7 | DB2.SLDPRT | 1.42M |
| 8 | DB3.SLDPRT | 1.65M |
| 9 | DB4.SLDPRT | 594.43K |
| 10 | DB5.SLDPRT | 2.22M |
| 11 | DB6.SLDPRT | 549.53K |
| 12 | DB7.SLDPRT | 40.77K |
| 13 | G1.SLDPRT | 25.55K |
| 14 | G2.SLDPRT | 19.45K |
| 15 | holder.SLDPRT | 25.31K |
| 16 | JZ.SLDPRT | 27.42K |
| 17 | link.SLDPRT | 20.29K |
| 18 | movablecenter.SLDPRT | 23.73K |
| 19 | shortlink.SLDPRT | 20.44K |
| 20 | 多自由度物料夹持机器人.SLDASM | 8.69M |
| 21 | 多自由度物料夹持机器人.x_t | 24.16M |
此图纸下载需要35金币
立即下载
发布者
畅快的柠檬
创作: 6
粉丝: 0
加入时间:2023-12-31

模型信息
图纸格式:sldprt,sldasm,x_t
文件大小:26.51M
所需金币:35
上传时间:2024-04-04 17:52:35
是否可编辑:可修改,不包括参数
版本:Parasolid x-t
标签
机器人
机械手
物料夹持
多自由度
图纸简介
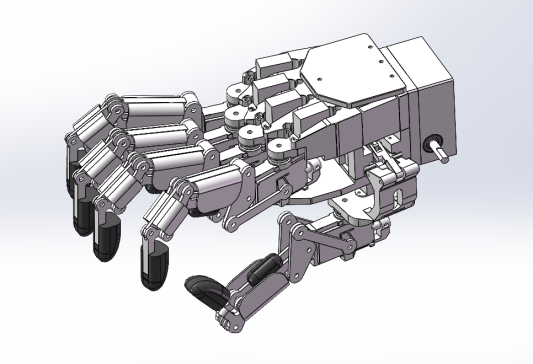
多自由度物料夹持机器人,这是一款专门为转移物料需求所设计的机器人,其末端执行器采用电动推杆与连杆滑块的组合式结构,可夹持棍棒类工件。文件包内含通用格式X-t,欢迎各位朋友下载使用。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0_0_364.png)
0.png)
0.png)
0_0_364.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)

