登录注册
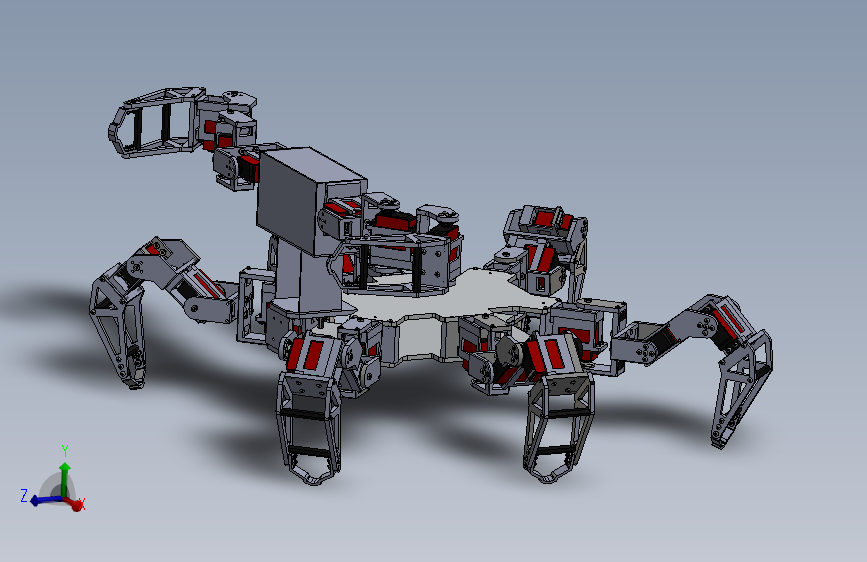
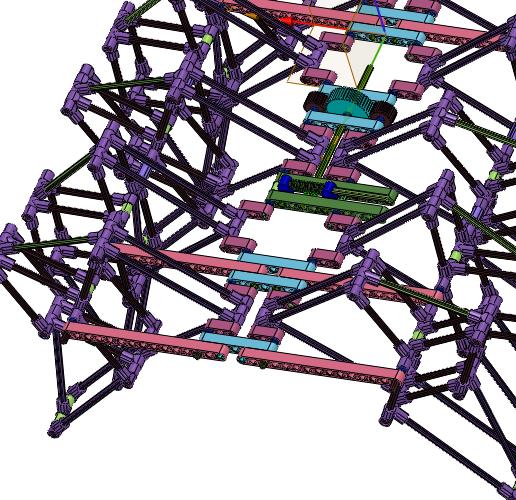
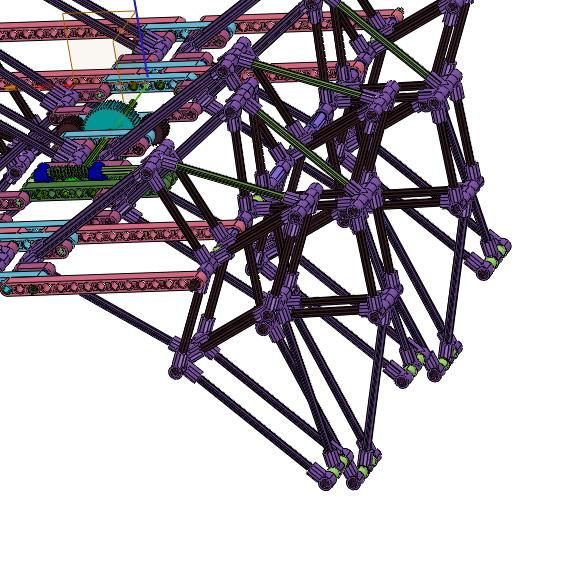
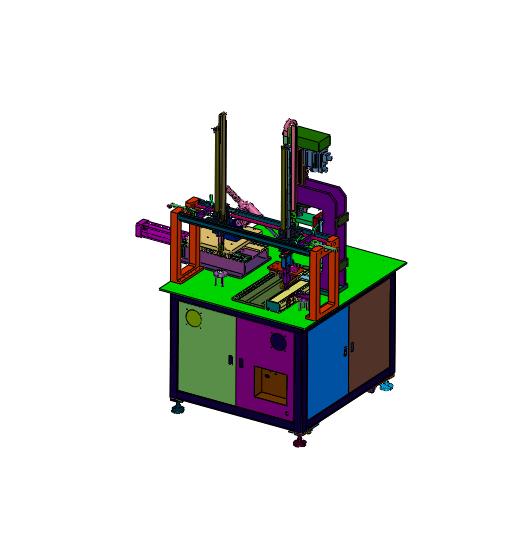
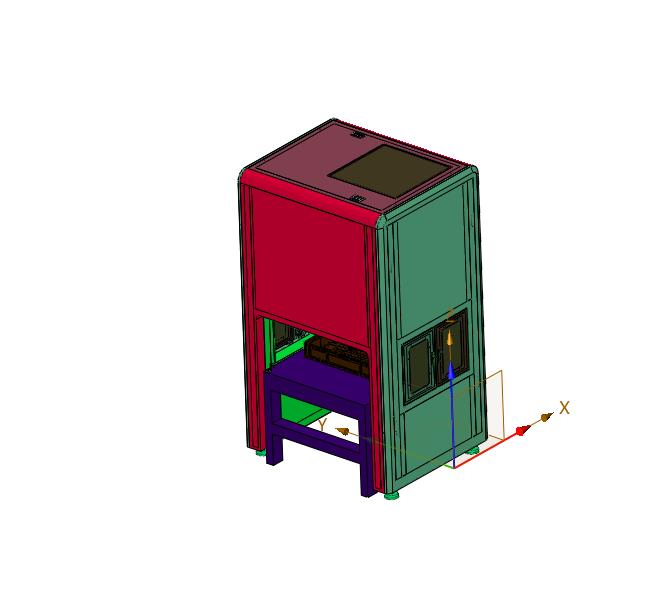
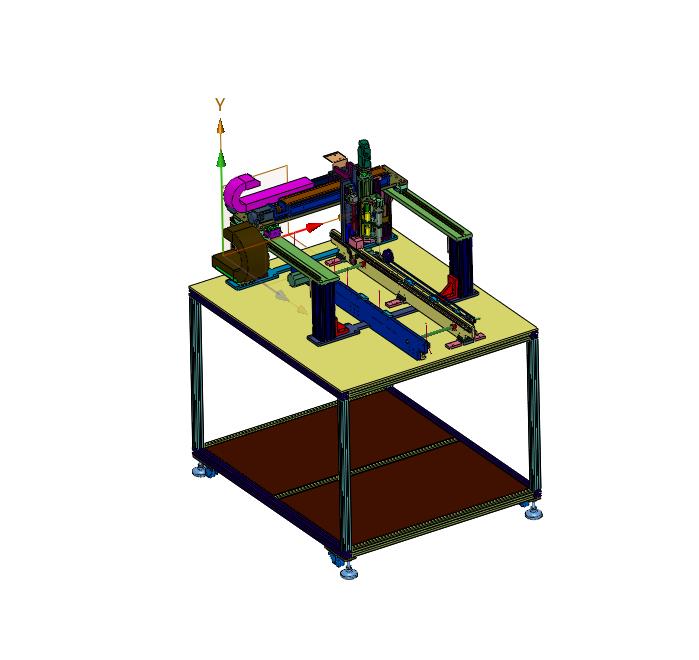
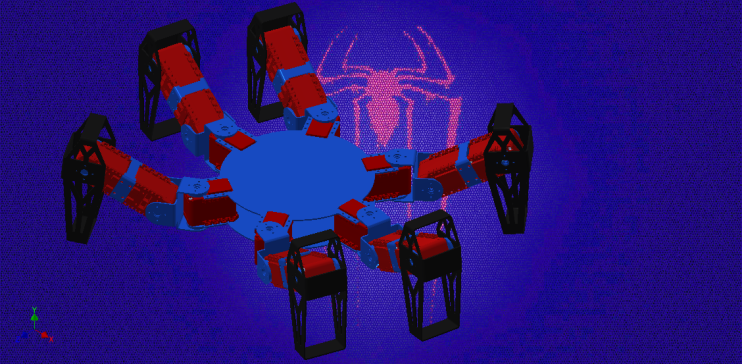
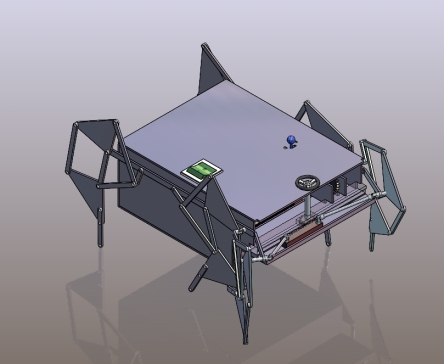
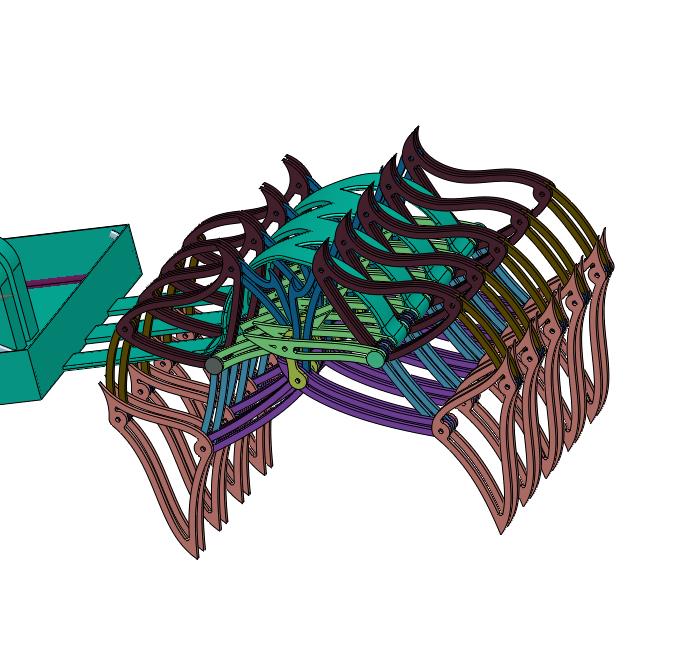
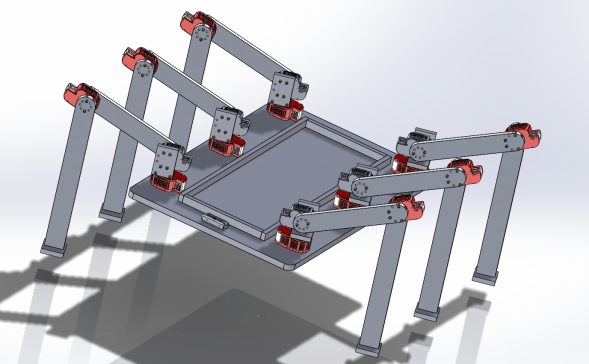
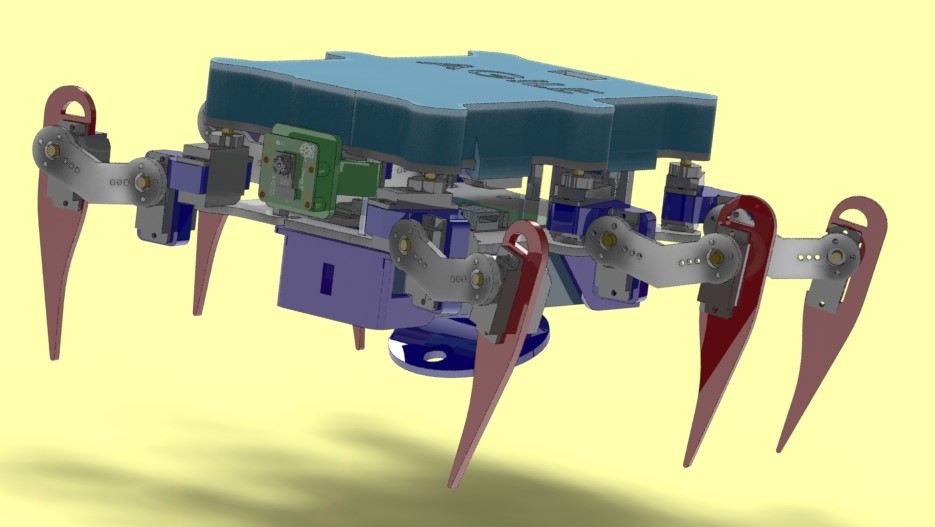
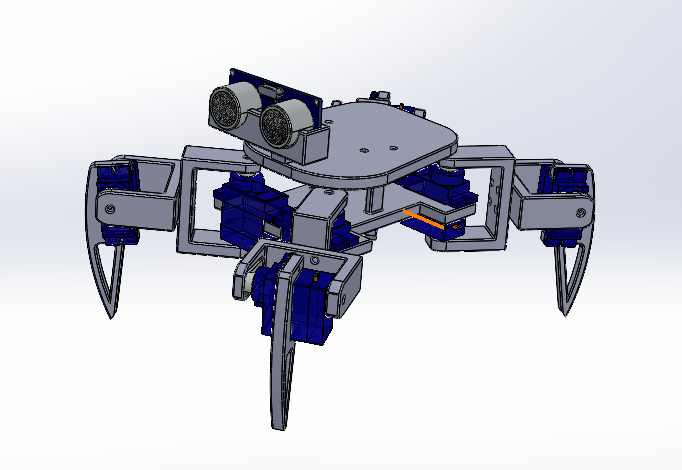
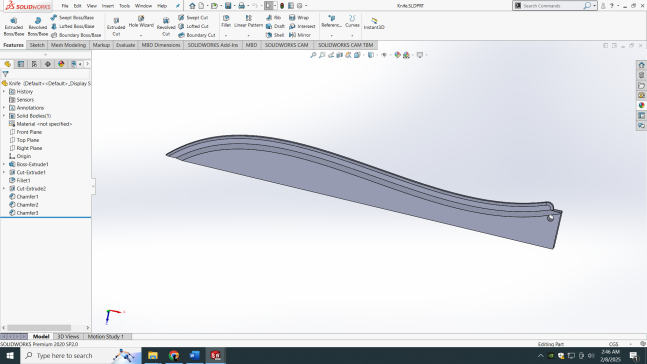
齿轮连杆组合机构的多足机器人(ID:1270322)
0.png)
1.png)
2.png)
3.png)
4.png)


| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1713977907538.zip | 1.19M |
| 2 | 360截图20240401224237958.jpg | 22.56K |
| 3 | 360截图20240401224246969.jpg | 76.51K |
| 4 | 360截图20240401224250121.jpg | 71.36K |
| 5 | 360截图20240401224253096.jpg | 63.05K |
| 6 | 齿轮连杆组合机构的多足机器人.stp | 6.12M |
此图纸下载需要100金币
立即下载
发布者
落后的皮皮虾
创作: 79096
粉丝: 403
加入时间:2022-09-02

模型信息
图纸格式:stp
文件大小:1.22M
所需金币:100
上传时间:2024-04-25 00:58:27
是否可编辑:可修改,不包括参数
版本:STEP
标签
齿轮
连杆
多足
机器人
组合机构
图纸简介
齿轮连杆组合机构的多足机器人,凭借其灵活的齿轮连杆传动和多足设计,展现了出色的机动性和稳定性。它能够应对复杂地形,执行多样化任务,展现了先进的机器人技术。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
![法兰连接球阀[80]-dtk](https://html.lazystones.com/lazy/2778231/image/cd92129b-f536-48f6-a953-69e788b7bb7f原图(主)0.png)
0.png)
猜你喜欢



0.png)
0_0_364.png)
0_0_364.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)