
登录注册
UG可转位机械手(ID:1379296)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17156773106205.rar | 8.04M |
| 2 | 1.prt | 200.00K |
| 3 | 1_dwg1.prt | 273.50K |
| 4 | 2.prt | 113.00K |
| 5 | 3.prt | 103.00K |
| 6 | 4.prt | 113.50K |
| 7 | 5.prt | 124.50K |
| 8 | 6.prt | 131.00K |
| 9 | all.prt | 73.50K |
| 10 | L型_model1.prt | 375.50K |
| 11 | M10.1.prt | 313.50K |
| 12 | M10.prt | 544.00K |
| 13 | M5.0.prt | 307.00K |
| 14 | M5.1.prt | 150.00K |
| 15 | m5.3.prt | 459.50K |
| 16 | M5.4.prt | 497.50K |
| 17 | M5.5.prt | 588.00K |
| 18 | M5.prt | 680.00K |
| 19 | v型块1.prt | 192.00K |
| 20 | _all.prt | 89.50K |
| 21 | 一对联轴器.prt | 89.50K |
| 22 | 圆柱.prt | 270.50K |
| 23 | 手指.prt | 2.16M |
| 24 | 手指气缸.prt | 89.50K |
| 25 | 手臂.prt | 307.00K |
| 26 | 手臂1.prt | 217.50K |
| 27 | 支撑.prt | 576.00K |
| 28 | 斜柱.prt | 247.00K |
| 29 | 机底.prt | 166.50K |
| 30 | 球.prt | 174.50K |
| 31 | 电机1.prt | 183.50K |
| 32 | 联轴器2.prt | 122.00K |
| 33 | 联轴器20.prt | 187.50K |
| 34 | 联轴器3.prt | 144.50K |
| 35 | 联轴器_model1.prt | 198.00K |
| 36 | 螺栓1.prt | 177.50K |
| 37 | 轴.1prt.prt | 335.00K |
| 38 | 轴套.prt | 121.50K |
| 39 | 轴承_model1.prt | 407.50K |
| 40 | 轴承_model1_dwg1.prt | 876.00K |
| 41 | 键1.prt | 116.00K |
| 42 | 1.afu | 1.50K |
| 43 | motion_1-solution_1.msg | 22.10K |
| 44 | motion_1-solution_1.rad | 58.30K |
| 45 | motion_1-solution_1.rmd | 11.52K |
| 46 | motion_1-solution_1.rplt | 74.46K |
| 47 | motion_1-solution_2.msg | 22.10K |
| 48 | motion_1-solution_2.rad | 58.30K |
| 49 | motion_1-solution_2.rmd | 11.54K |
| 50 | motion_1-solution_2.rplt | 74.46K |
| 51 | motion_1-solution_3.msg | 22.10K |
| 52 | motion_1-solution_3.rad | 58.30K |
| 53 | motion_1-solution_3.rmd | 11.54K |
| 54 | motion_1-solution_3.rplt | 74.46K |
| 55 | motion_1-solution_4.msg | 22.10K |
| 56 | motion_1-solution_4.rad | 58.30K |
| 57 | motion_1-solution_4.rmd | 11.62K |
| 58 | motion_1-solution_4.rplt | 74.46K |
| 59 | motion_1-solution_5.msg | 22.10K |
| 60 | motion_1-solution_5.rad | 58.30K |
| 61 | motion_1-solution_5.rmd | 11.61K |
| 62 | motion_1-solution_5.rplt | 74.46K |
| 63 | motion_1.sim | 191.00K |
此图纸下载需要68金币
立即下载
发布者
一品三维工程师
创作: 283
粉丝: 2
加入时间:2024-05-03

模型信息
图纸格式:prt
文件大小:8.24M
所需金币:68
上传时间:2024-05-14 17:01:52
是否可编辑:可修改,包括参数
版本:UG 12
标签
UG
3D建模
运动仿真
智能
图纸简介
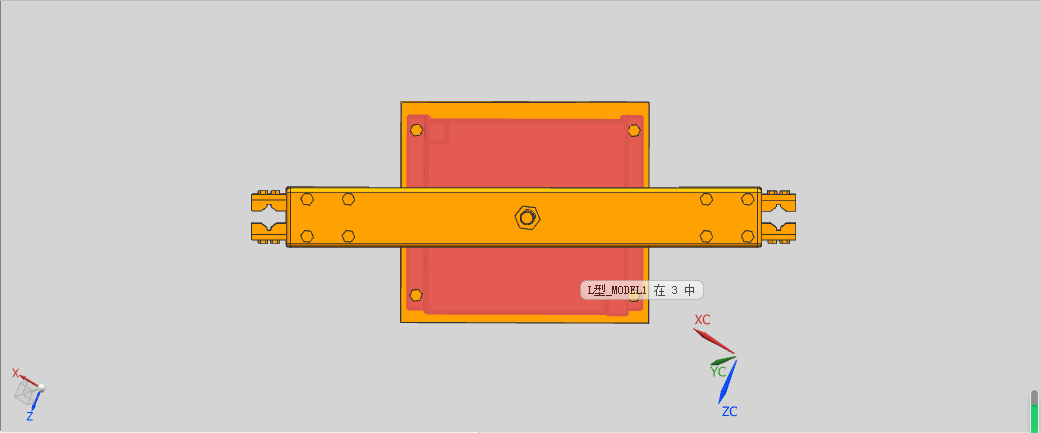
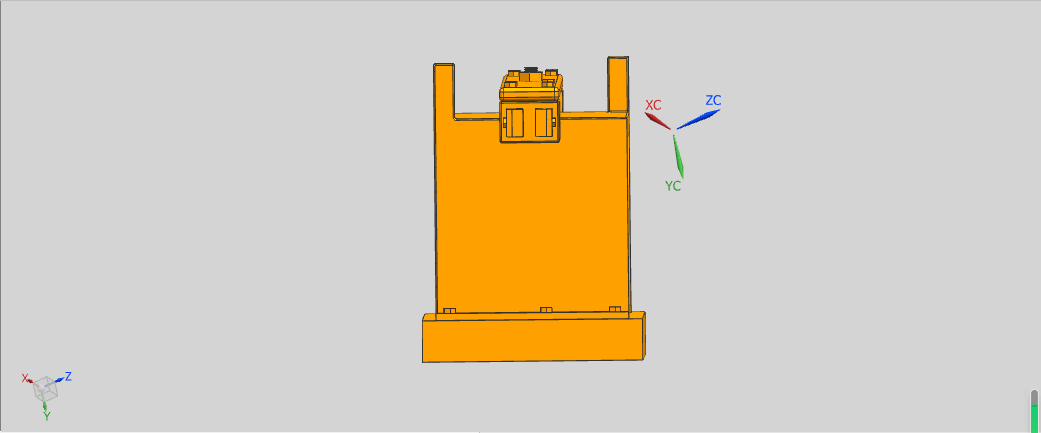
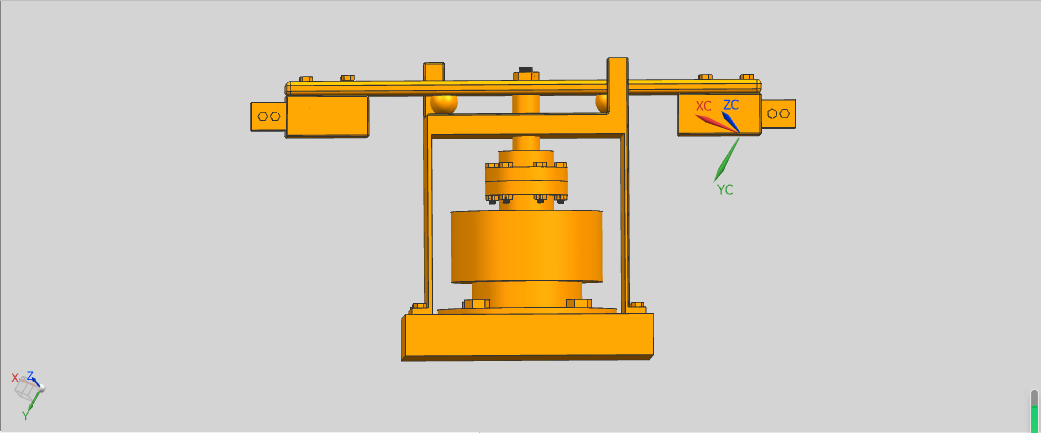
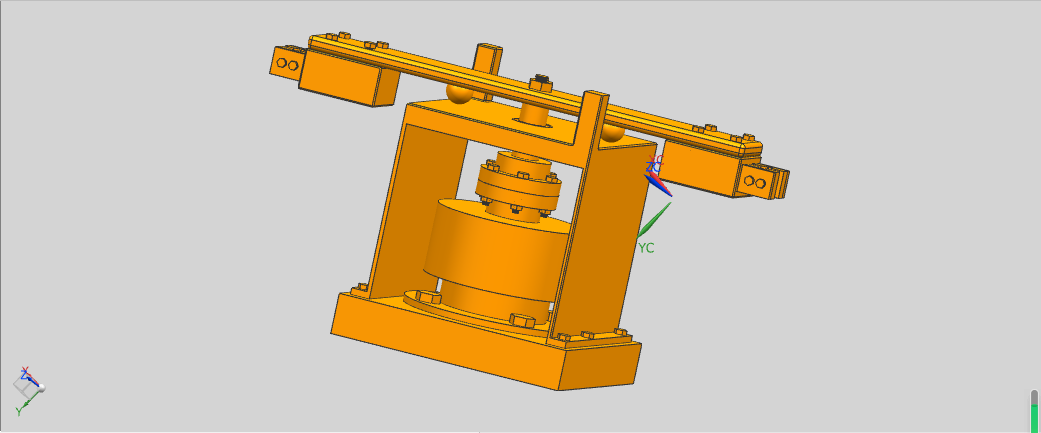
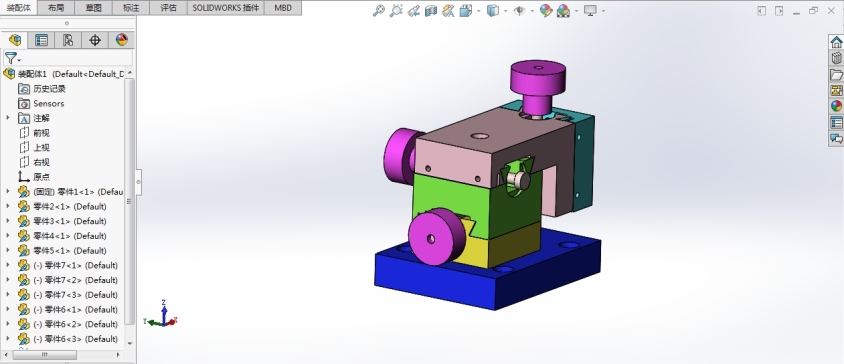
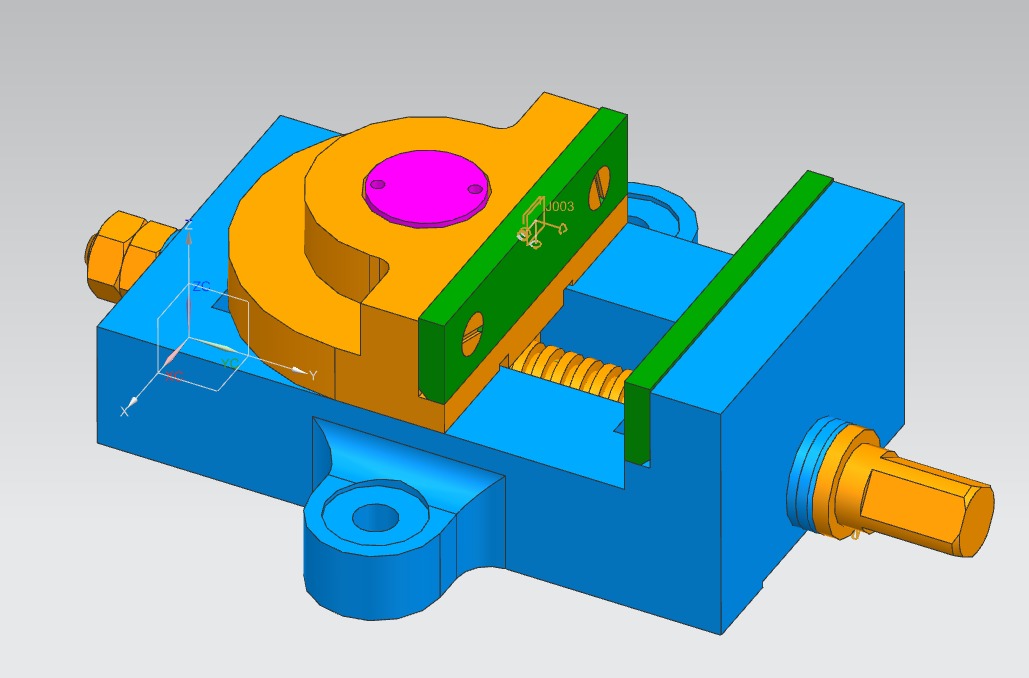
1.3D建模:利用UG软件中的零件3D建模模块,进行机械手各部件的三维结构设计。这一步骤需要精确地绘制出每个零件的形状、尺寸和特征。
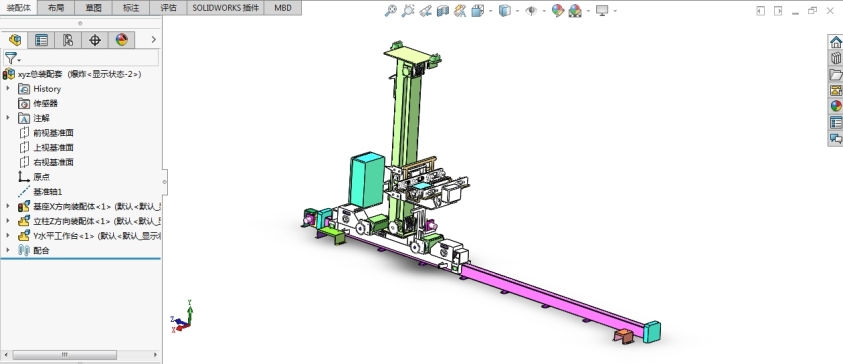
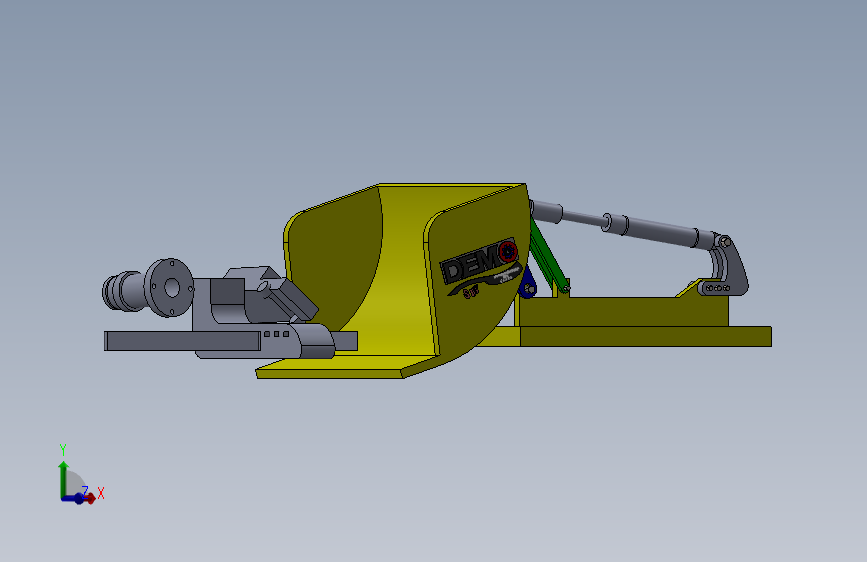
2.装配图设计:在完成零件的3D建模后,使用UG软件的装配模块将设计好的零件组装成完整的机械手。
3.运动仿真:对已装配好的机械手模型进行运动学分析和仿真。
4.运动仿真分析:在运动仿真完成后,可以观察机械手的运动情况,分析是否满足设计要求
5.安全性和稳定性考虑:在进行设计和仿真时,必须考虑到机械手在实际工作中的安全性和稳定性,确保其在各种工况下都能安全可靠地运行。
需要注意的是,这个过程是迭代的,可能需要多次调整和优化才能达到最佳效果。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多




0.png)
0.jpg)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.jpg)
0.png)
0_0_364.png)
0.png)
0.png)
0.jpg)

