
登录注册
基于奥迪Q5的四轮转向系设计及运动仿真(ID:1447587)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染


0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17182402485987.rar | 51.47M |
| 2 | 中期检查报告.doc | 345.05K |
| 3 | 中期答辩.ppt | 1.55M |
| 4 | 开题报告.doc | 67.61K |
| 5 | 开题答辩.ppt | 1.06M |
| 6 | 文献原文.pdf | 250.76K |
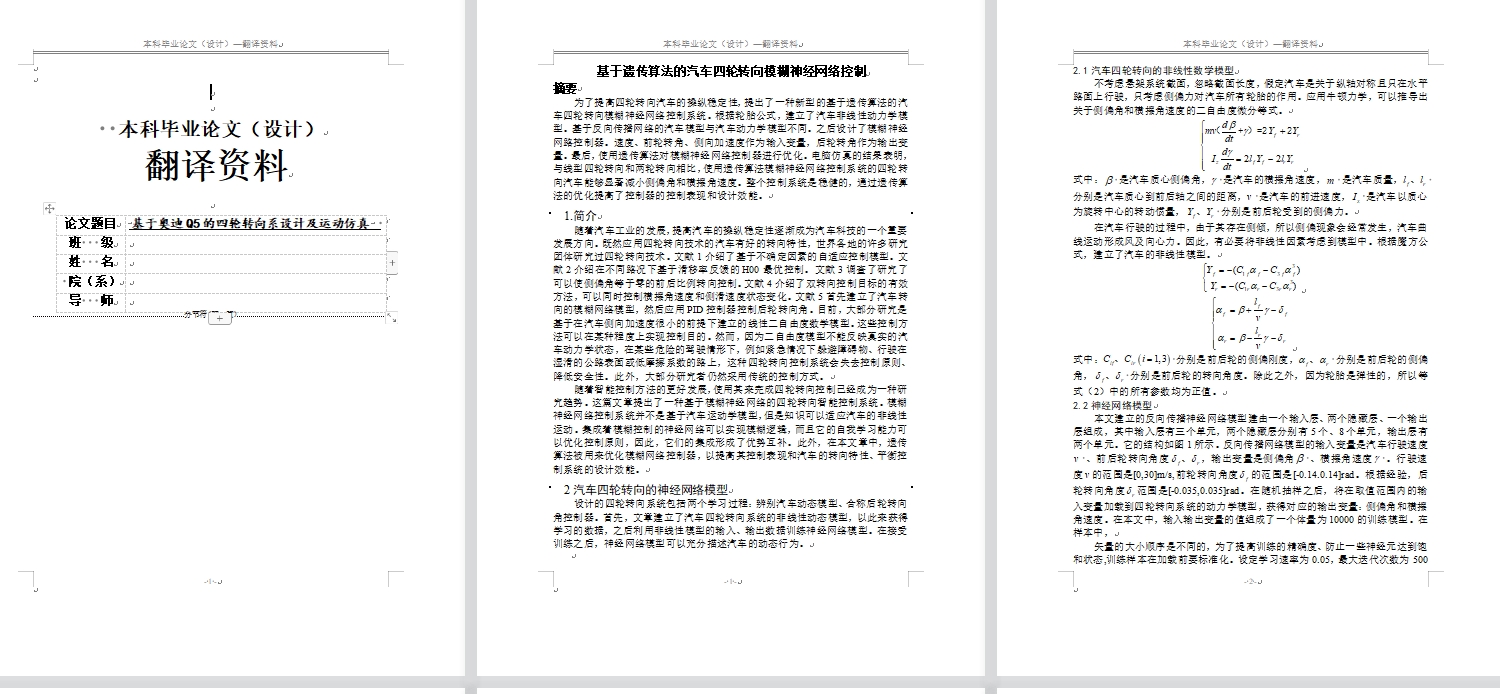
| 7 | 文献翻译.doc | 246.71K |
| 8 | 毕业答辩.pptx | 1.55M |
| 9 | 毕业论文.doc | 2.79M |
| 10 | 毕设任务书.doc | 24.50K |
| 11 | chi-lun-chi-tiao-zhu-dong-chi-lun-hou.CATPart | 304.38K |
| 12 | di-ban.CATPart | 166.89K |
| 13 | dian-ji.CATPart | 98.63K |
| 14 | ECU.CATPart | 2.24M |
| 15 | hou-jian-su-qi.CATPart | 8.71M |
| 16 | hou-qiao-gu-ding-bu-fen.CATPart | 8.58M |
| 17 | hou-qiao.CATPart | 6.72M |
| 18 | lian-zhou-qi.CATPart | 618.96K |
| 19 | qian-chi-lun-chi-tiao-zhu-dong-xhi-lun.CATPart | 6.91M |
| 20 | qian-chi-lun-chi-tiao-zhu-dong-xhi-lun_1.CATPart | 1.12M |
| 21 | qian-qiao-gu-ding-bu-fen_1.CATPart | 9.37M |
| 22 | qian-zhuan-xiang-heng-la-gan.CATPart | 456.42K |
| 23 | you-hou-ce-la-gan.CATPart | 90.99K |
| 24 | you-hou-zhuan-xiang-jie.CATPart | 558.66K |
| 25 | you-qian-ce-la-gan.CATPart | 89.13K |
| 26 | you-qian-zhuan-xiang-jie.CATPart | 713.43K |
| 27 | zhuan-xiang-heng-la-gan.CATPart | 497.26K |
| 28 | zhuan-xiang-pan.CATPart | 9.19M |
| 29 | zhuan-xiang-zhou.CATPart | 11.28M |
| 30 | zhuangpei_asm.stp | 27.51M |
| 31 | zongzhuang-fan-xiang.CATProduct | 219.09K |
| 32 | zongzhuang-fan-xiang.stp | 48.45M |
| 33 | zongzhuang-tong-xiang.CATProduct | 219.38K |
| 34 | zuo-hou-ce-la-gan.CATPart | 90.78K |
| 35 | zuo-hou-zhuan-xiang-jie.CATPart | 737.50K |
| 36 | zuo-qian-ce-la-gan.CATPart | 88.85K |
| 37 | zuo-qian-zhuan-xiang-jie.CATPart | 725.55K |
| 38 | 前装A1.dwg | 335.72K |
| 39 | 前转向节A3.dwg | 103.45K |
| 40 | 前齿条A3.dwg | 80.07K |
| 41 | 后装A1.dwg | 275.23K |
| 42 | 后轮转向节A3.dwg | 104.23K |
| 43 | 后齿轮A4.dwg | 87.91K |
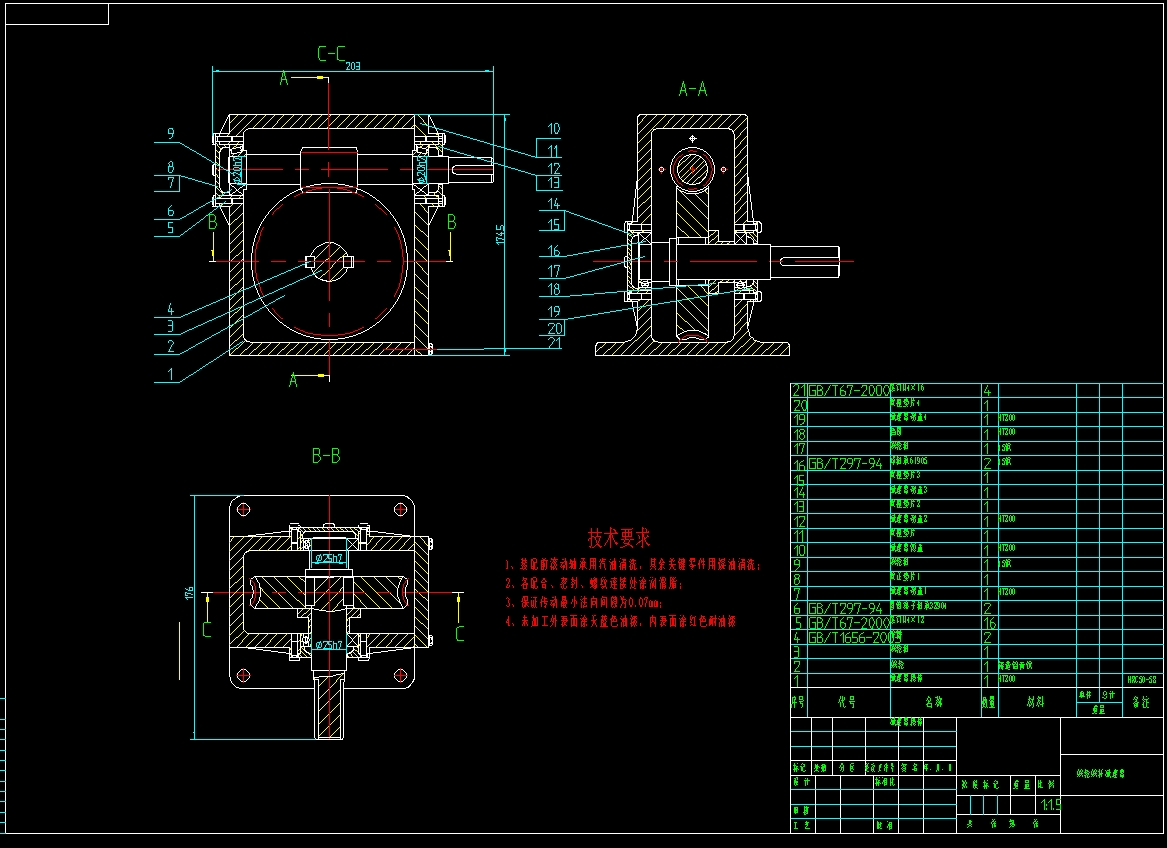
| 44 | 新减速器A2.dwg | 139.25K |
| 45 | 新前齿轮A4.dwg | 97.67K |
| 46 | 新后齿条A3.dwg | 84.70K |
| 47 | 新蜗轮A4.dwg | 79.50K |
| 48 | 蜗杆A4.dwg | 80.35K |
| 49 | 蜗轮轴A4.dwg | 81.38K |
| 50 | 装配示意图A1.dwg | 460.76K |
此图纸下载需要200金币
立即下载
发布者
火星上的冷风
创作: 319
粉丝: 22
加入时间:2023-05-25

模型信息
图纸ID:1447587
图纸格式:pdf,catpart,stp,catproduct,dwg
文件大小:52.71M
所需金币:200
上传时间:2024-06-13 08:58:45
是否可编辑:可修改,包括参数
软件版本:STEP
标签
图纸简介
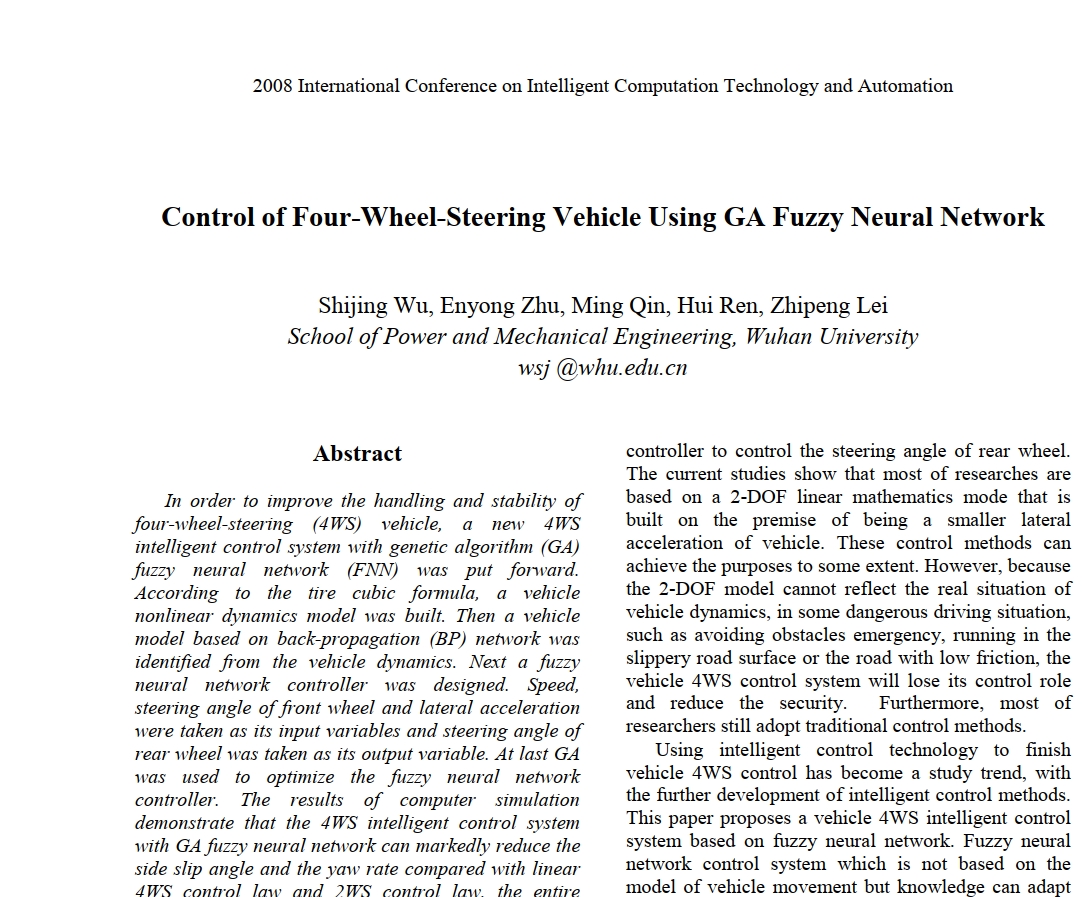
四轮转向系统利用行驶中的某些信息来控制后轮的转角输入,主要目的是增强汽车高速行驶时的操纵稳定性,提高汽车低速行驶时的操纵灵活性。
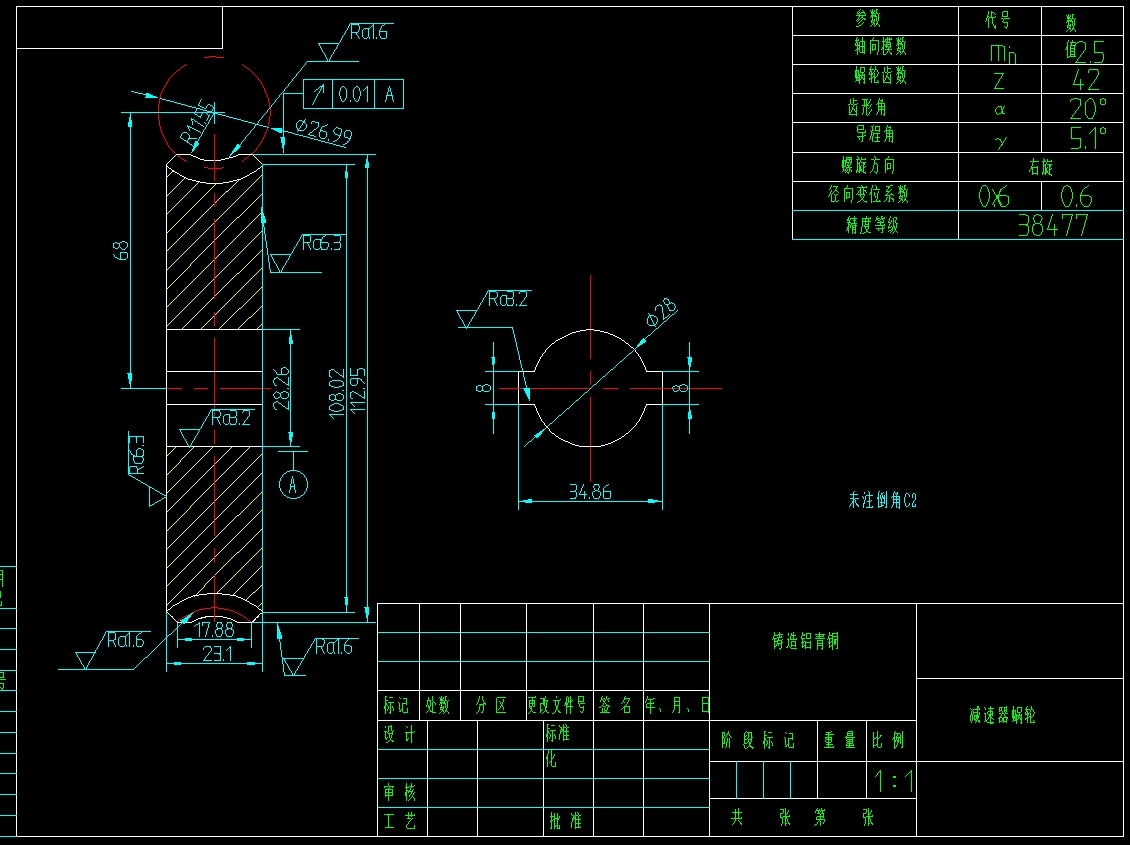
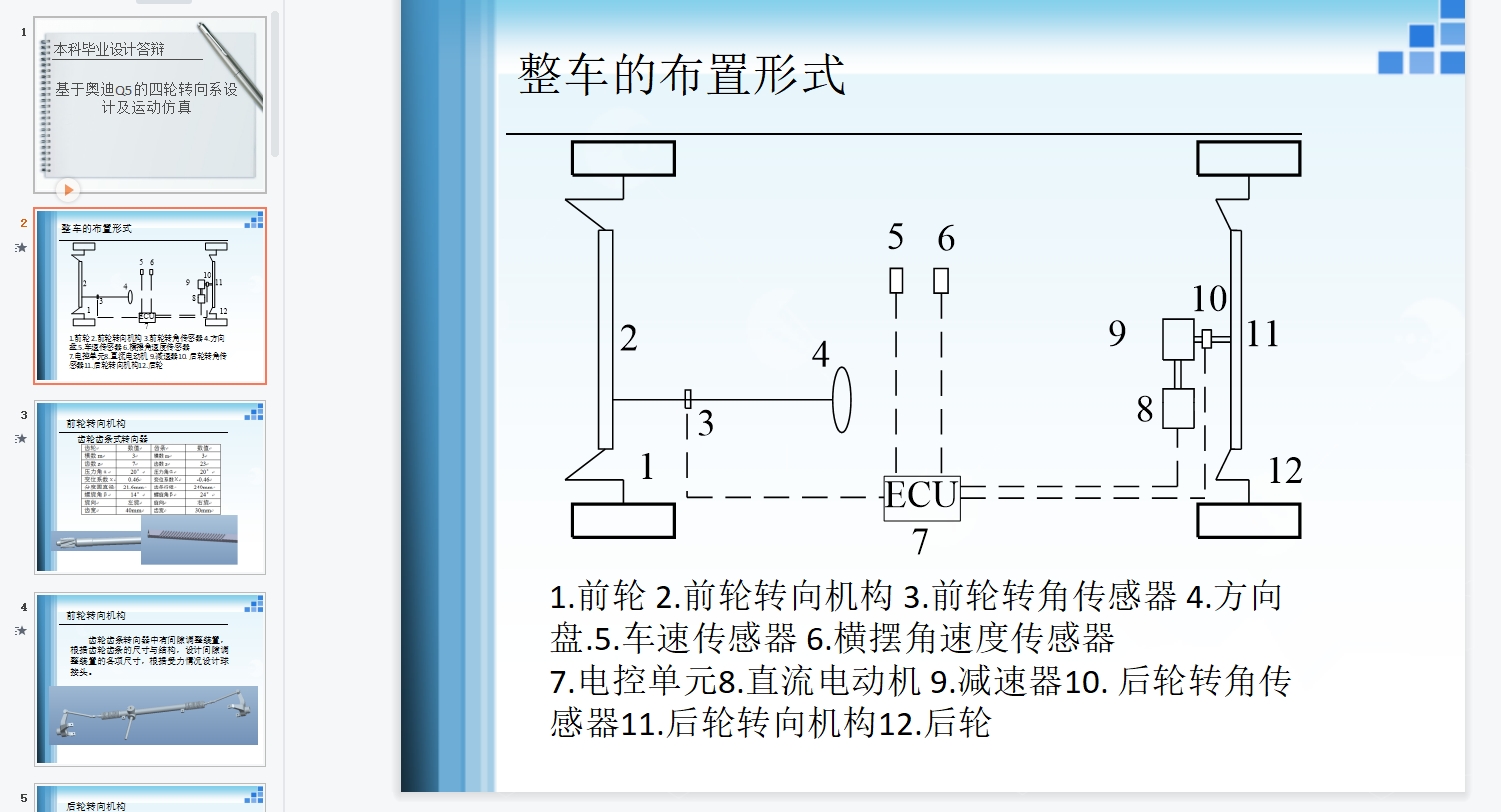
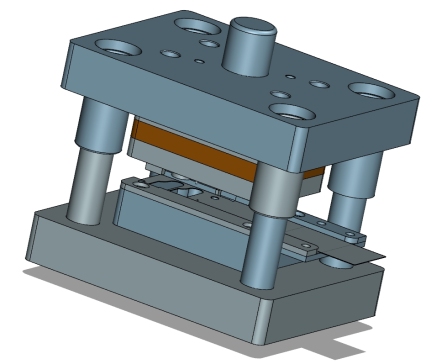
文中介绍了四种类型的四轮转向系统,为控制前后轮的协调偏转,提供了七种控制策略。根据已有的研究,设计了一种电控电动式的四轮转向系统,对其主要结构进行了介绍。
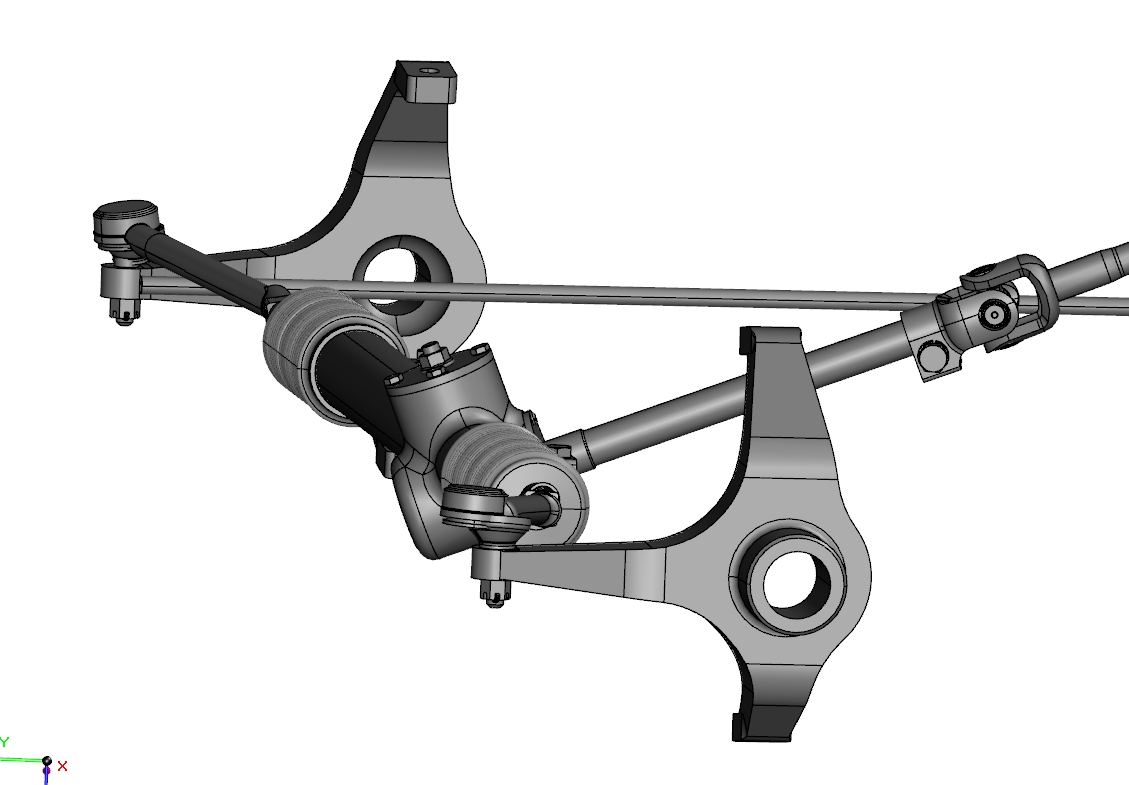
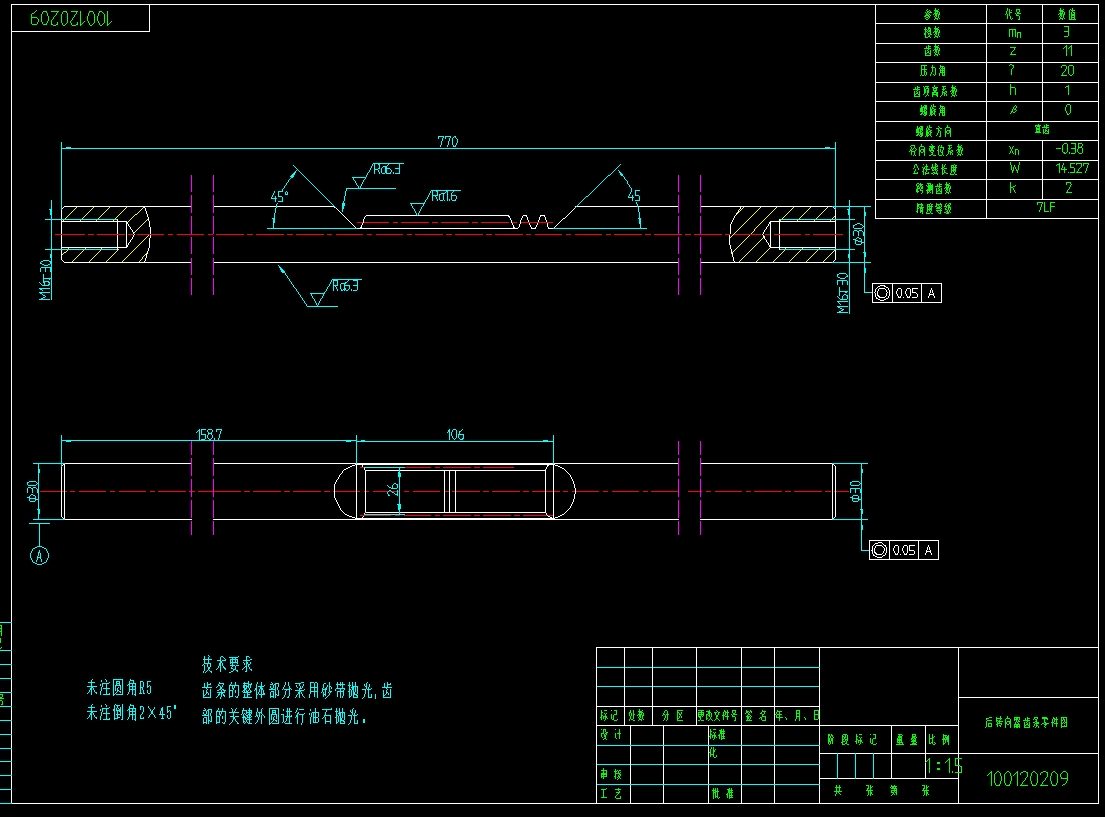
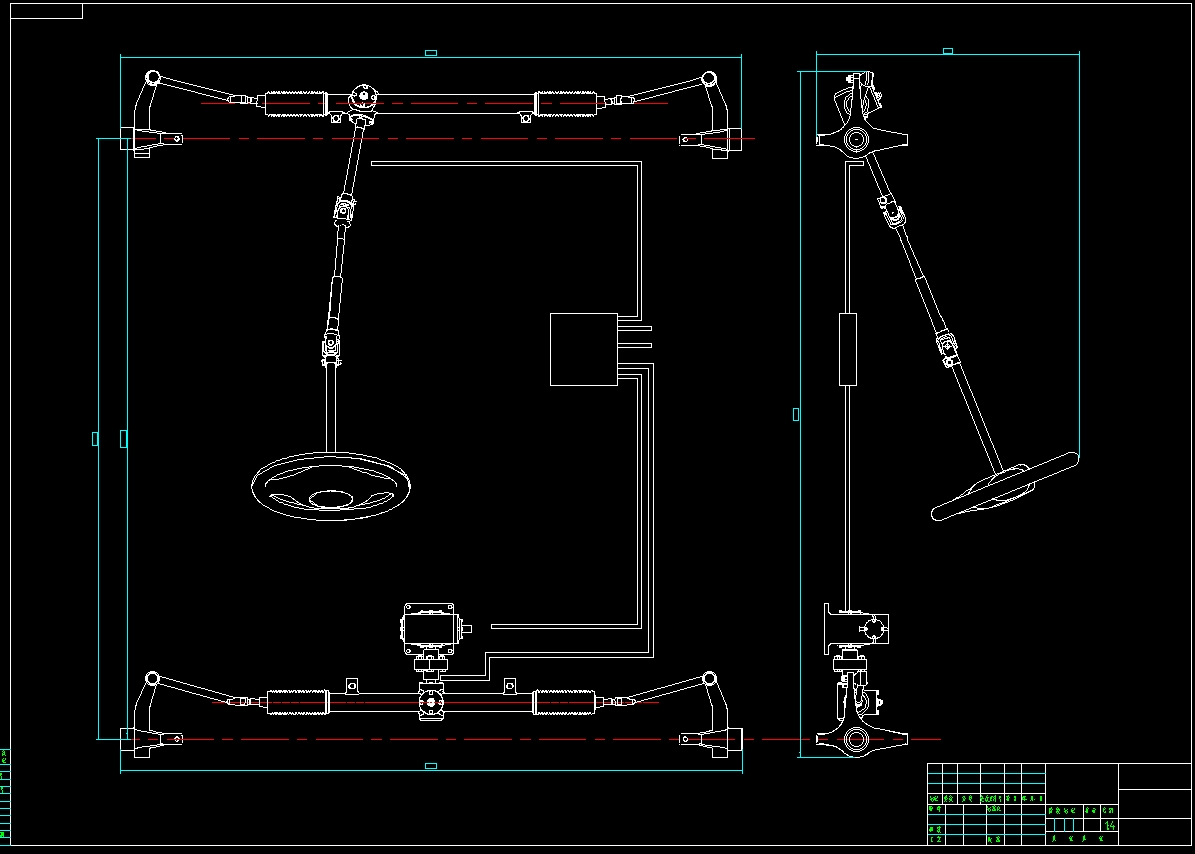
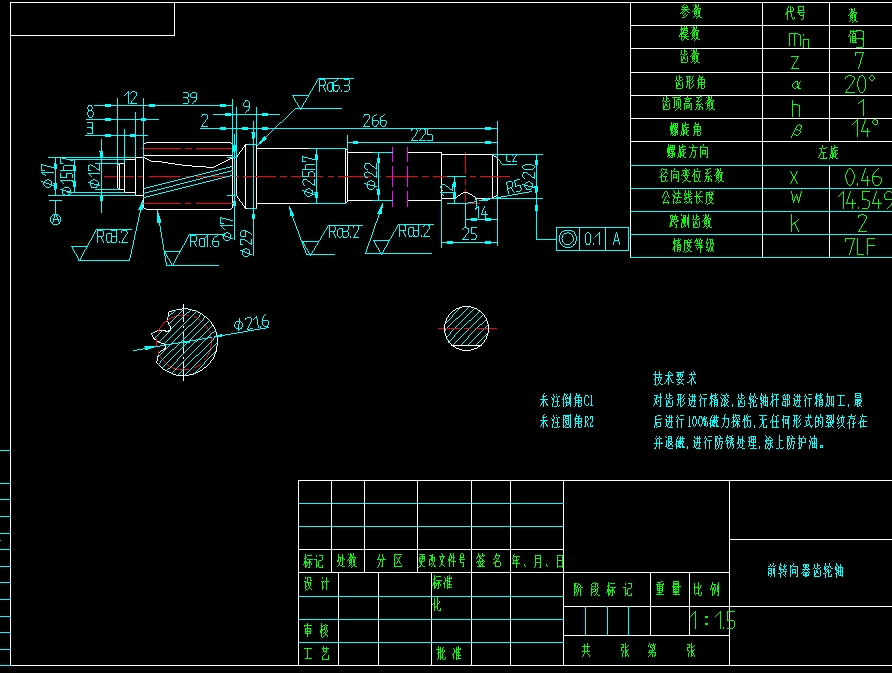
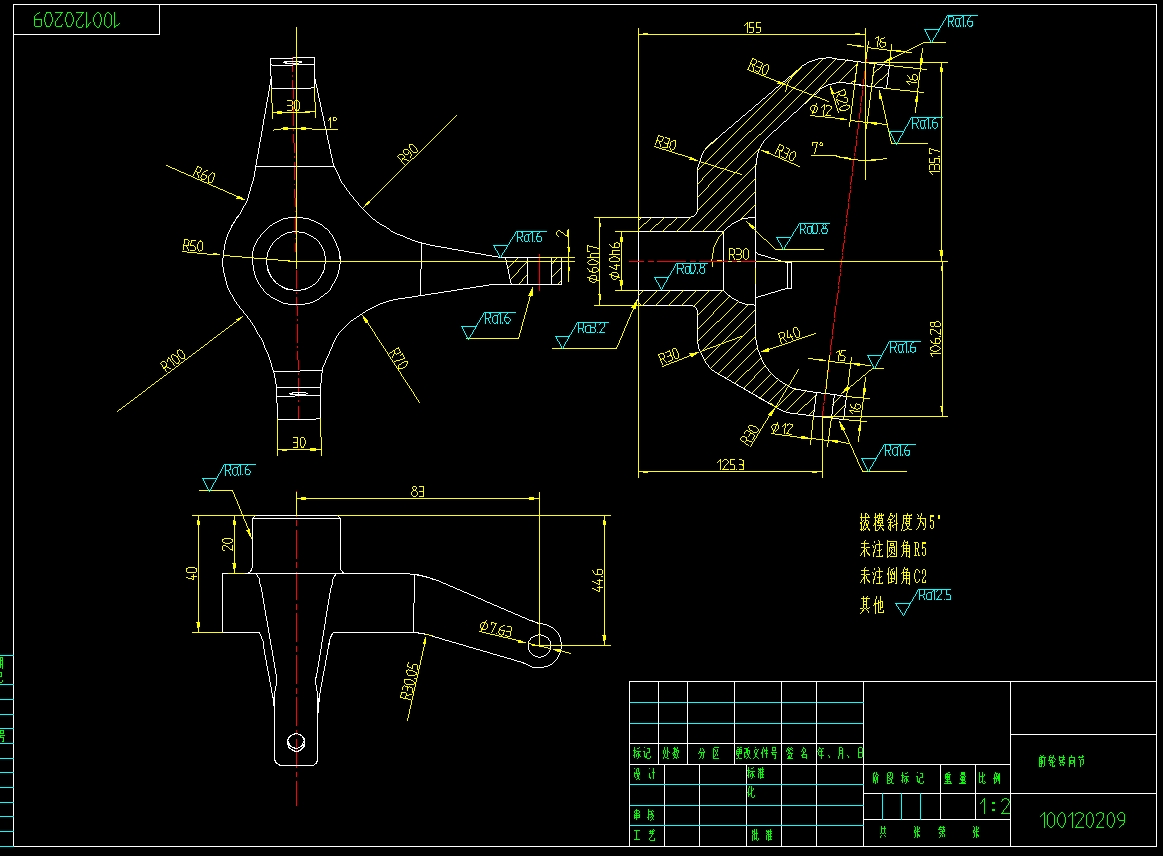
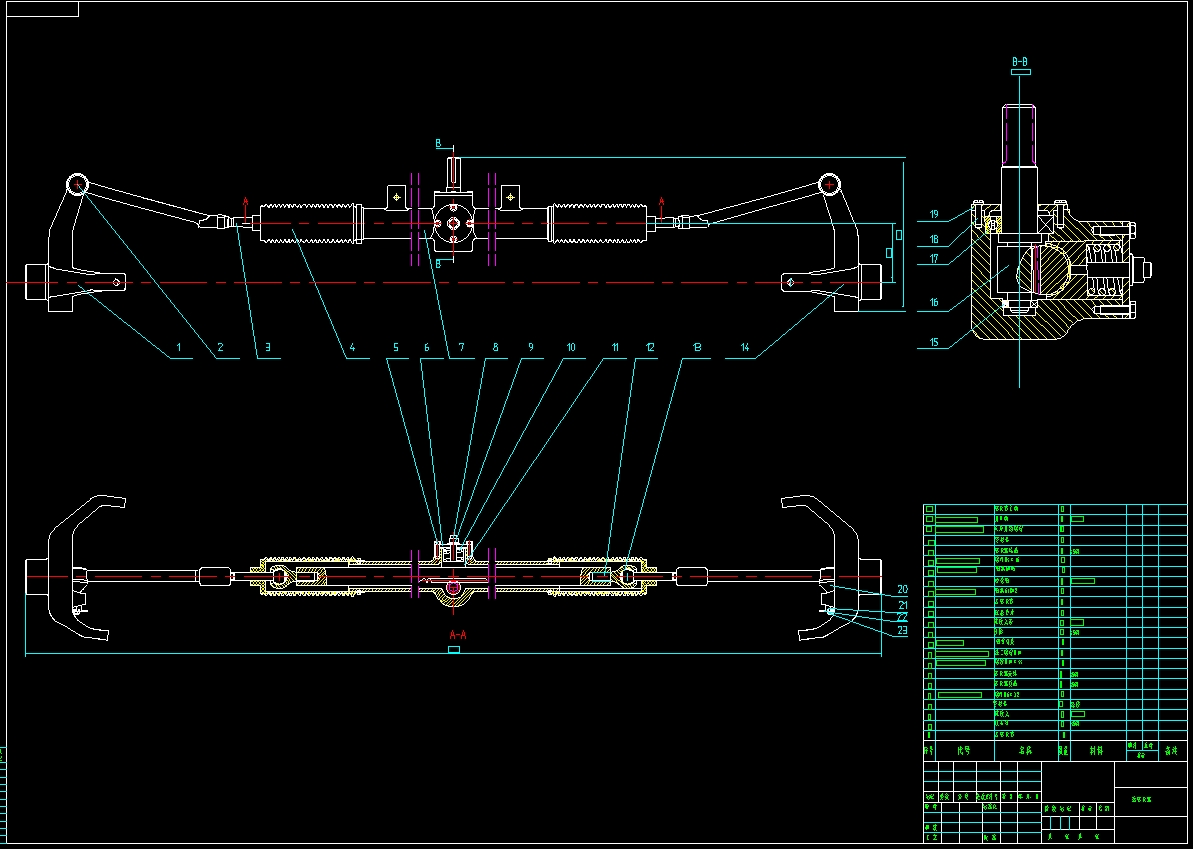
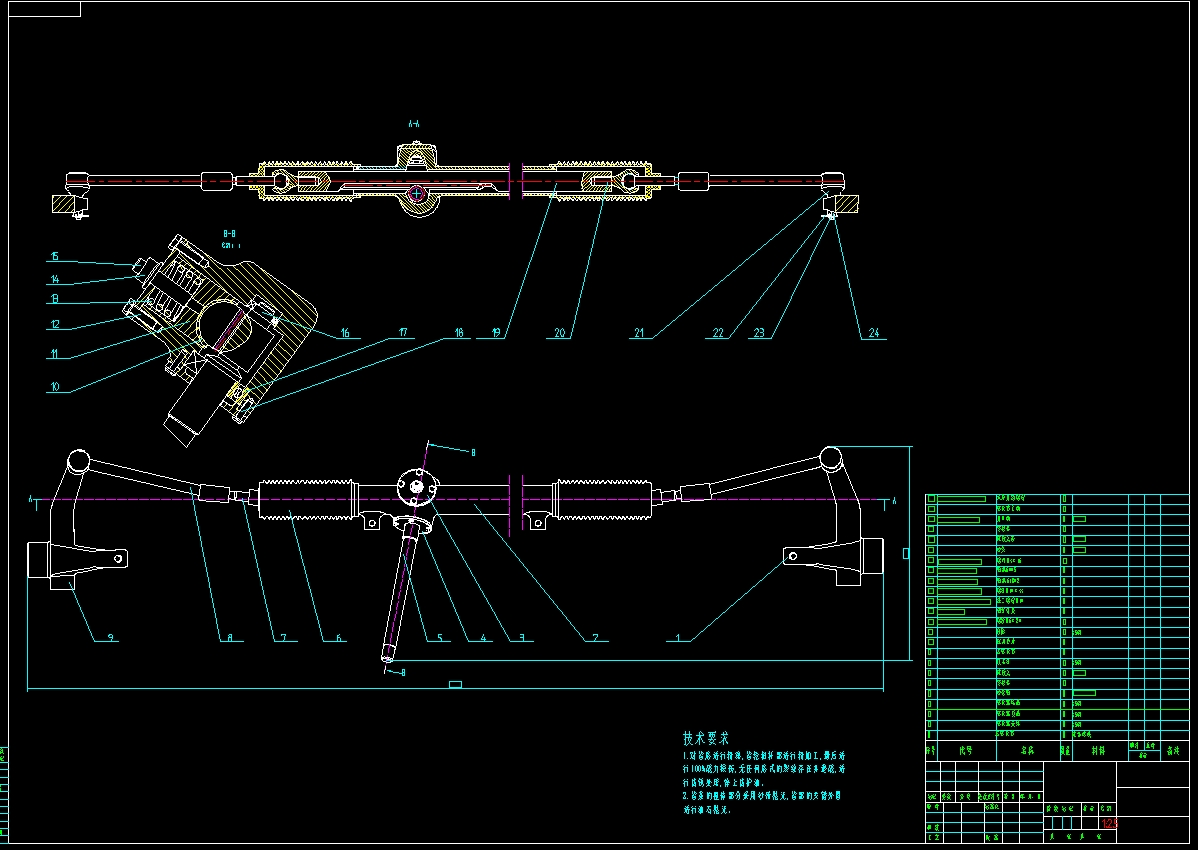
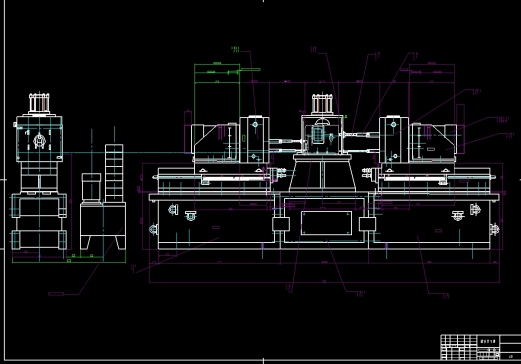
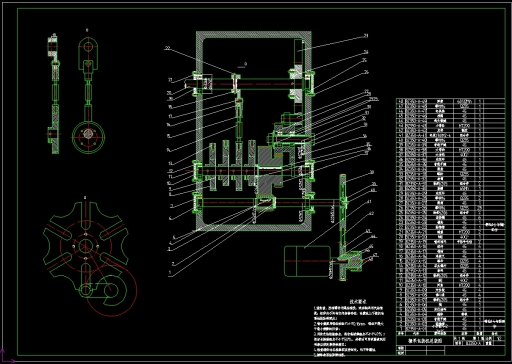
基于奥迪Q5的基本参数,设计了齿轮齿条式的前轮转向机构和后轮转向机构。基于阿克曼转向原理,运用Matlab优化工具箱对所设计的转向梯形机构进行尺寸优化。
本文建立了线型二自由度四轮转向汽车模型,推导出其运动微分方程。基于前后转角比例转向的控制策略,借助Matlab/Simulink对四轮转向和前轮转向汽车进行了
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多


0.png)
0_0_364.png)
0_0_364.png)
0.jpg)
0.png)
0_0_364.png)
0_0_364.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

