
登录注册
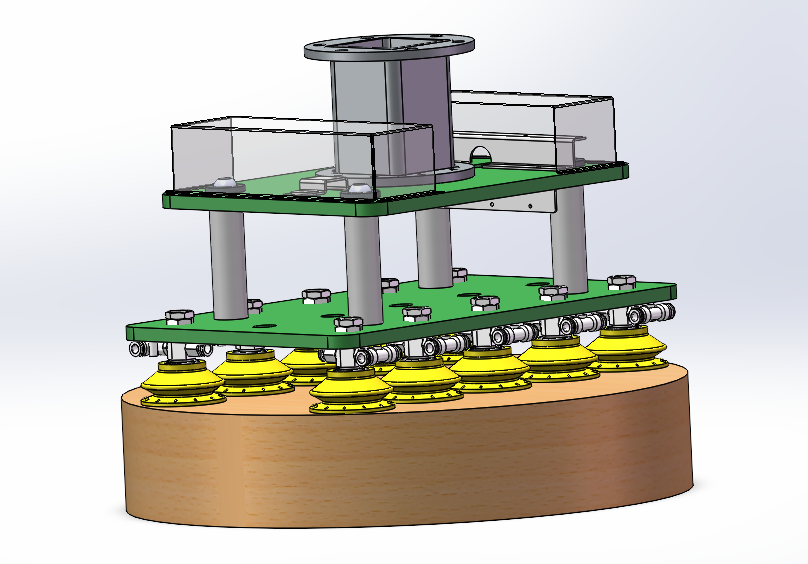
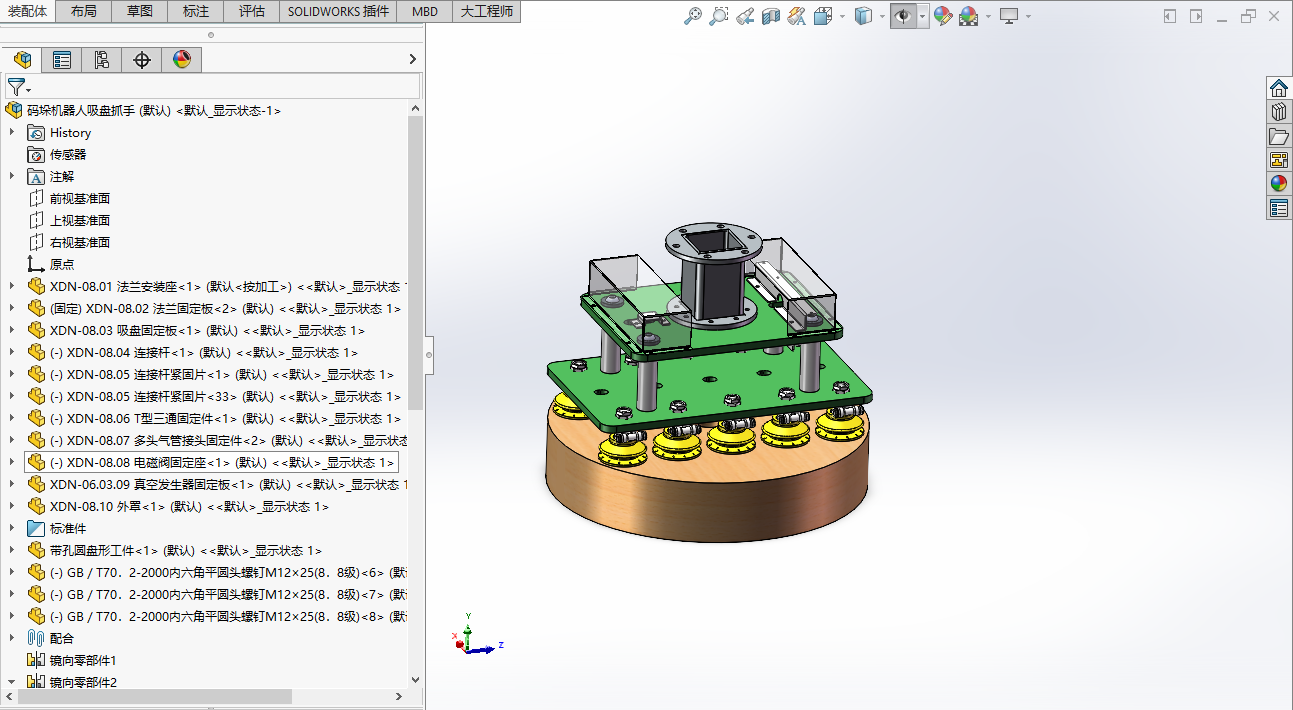
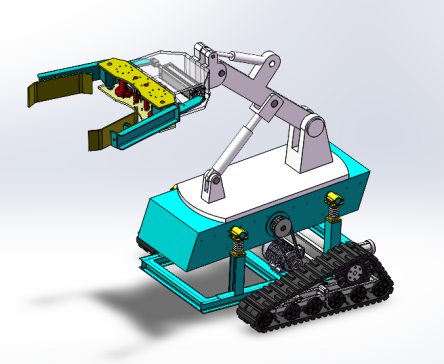
码垛机器人吸盘抓手(ID:1450683)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17186163975817.rar | 11.93M |
| 2 | XDN-08.01法兰安装座A4.DWG | 93.88K |
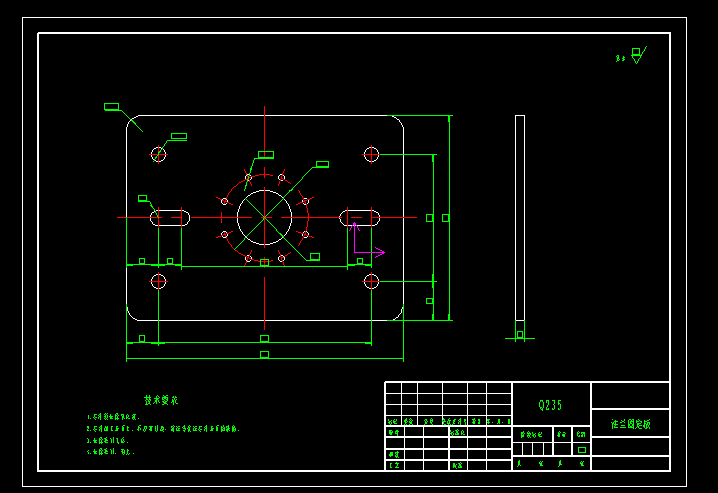
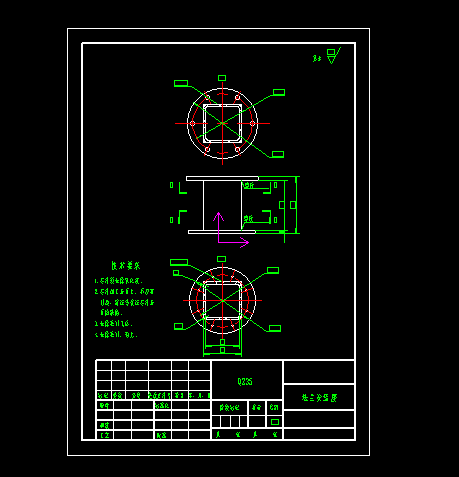
| 3 | XDN-08.02法兰固定板A3.DWG | 91.60K |
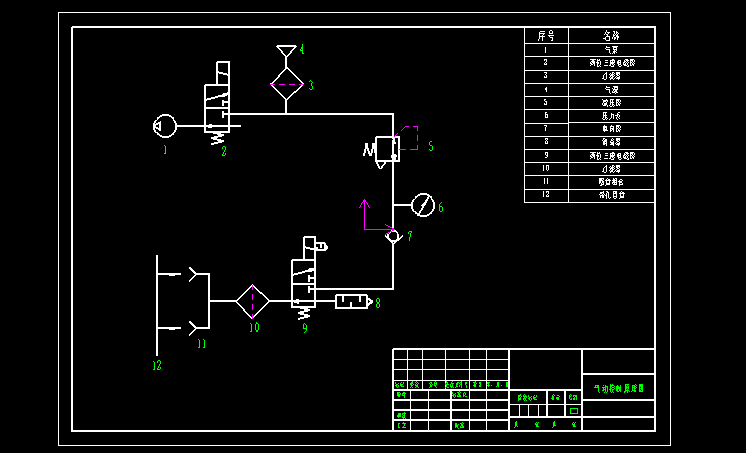
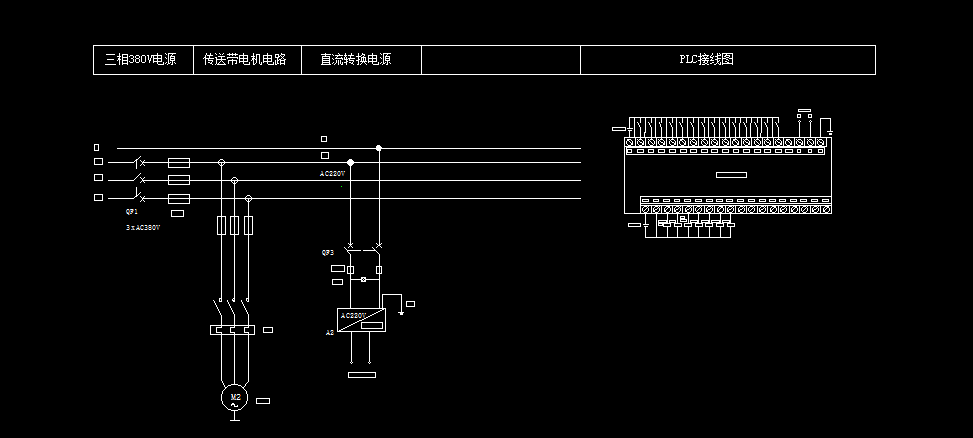
| 4 | 气动原理图.dwg | 64.19K |
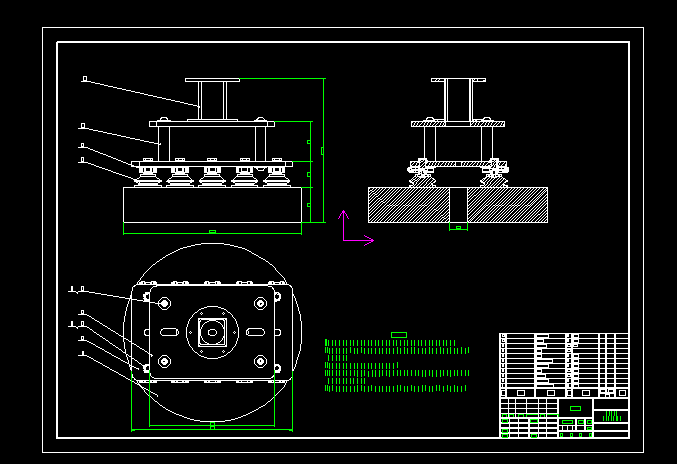
| 5 | 码垛机器人吸盘抓手装配图A1.DWG | 231.28K |
| 6 | 码垛机器人吸盘机械手设计说明书.docx | 778.98K |
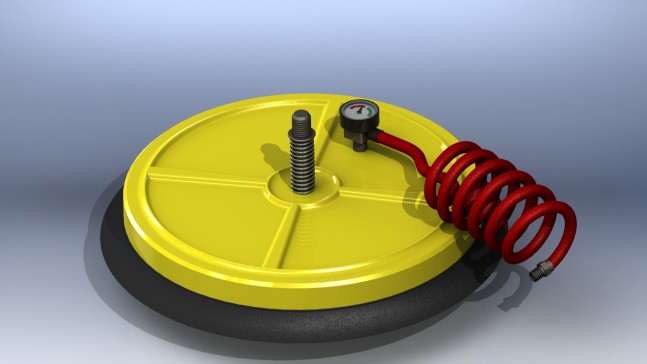
| 7 | 三维模型.png | 293.25K |
| 8 | 三维模型2.png | 291.87K |
| 9 | 三维零件图.png | 90.78K |
| 10 | 总装CAD.png | 21.17K |
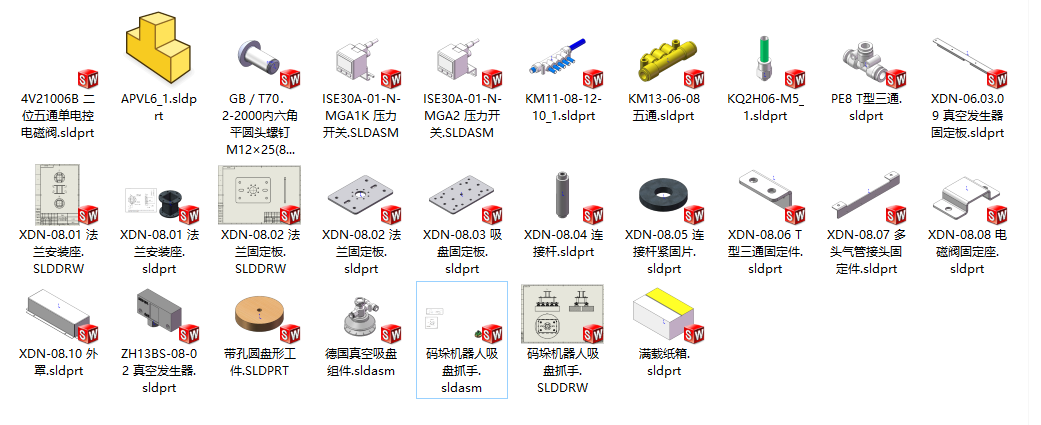
| 11 | 所有文件.png | 8.94K |
| 12 | 气动原理图.png | 17.25K |
| 13 | 设计说明书.png | 39.93K |
| 14 | 设计说明书2.png | 99.28K |
| 15 | 零件图1.png | 21.44K |
| 16 | 零件图2.png | 16.25K |
| 17 | 4V21006B二位五通单电控电磁阀.sldprt | 142.75K |
| 18 | APVL6_1.sldprt | 37.45K |
| 19 | GB/T70.2-2000内六角平圆头螺钉M12×258.8级.SLDPRT | 143.15K |
| 20 | ISE30A-01-N-MGA1K压力开关.SLDASM | 265.45K |
| 21 | ISE30A-01-N-MGA2压力开关.SLDASM | 256.83K |
| 22 | KM11-08-12-10_1.sldprt | 181.17K |
| 23 | KM13-06-08五通.sldprt | 195.56K |
| 24 | KQ2H06-M5_1.sldprt | 67.18K |
| 25 | PE8T型三通.sldprt | 284.16K |
| 26 | XDN-06.03.09真空发生器固定板.sldprt | 173.46K |
| 27 | XDN-08.01法兰安装座.SLDDRW | 228.10K |
| 28 | XDN-08.01法兰安装座.sldprt | 615.73K |
| 29 | XDN-08.02法兰固定板.SLDDRW | 121.89K |
| 30 | XDN-08.02法兰固定板.sldprt | 132.02K |
| 31 | XDN-08.03吸盘固定板.sldprt | 142.95K |
| 32 | XDN-08.04连接杆.sldprt | 100.99K |
| 33 | XDN-08.05连接杆紧固片.sldprt | 260.19K |
| 34 | XDN-08.06T型三通固定件.sldprt | 127.13K |
| 35 | XDN-08.07多头气管接头固定件.sldprt | 161.49K |
| 36 | XDN-08.08电磁阀固定座.sldprt | 156.09K |
| 37 | XDN-08.10外罩.sldprt | 192.06K |
| 38 | ZH13BS-08-02真空发生器.sldprt | 1.26M |
| 39 | 带孔圆盘形工件.SLDPRT | 305.20K |
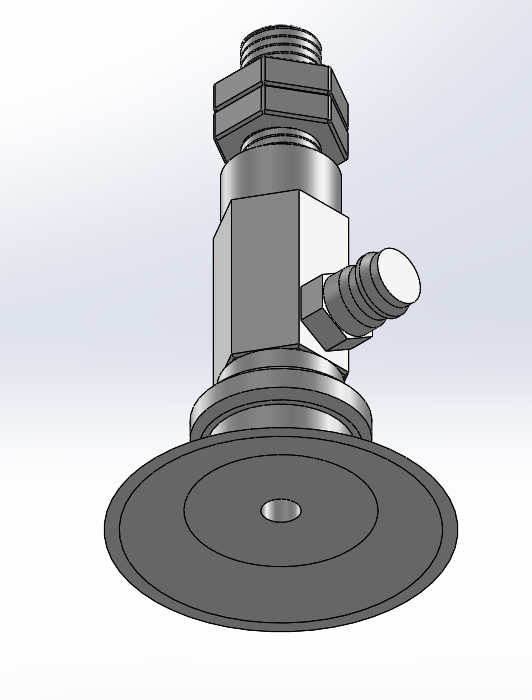
| 40 | 德国真空吸盘组件.sldasm | 1.15M |
| 41 | 满载纸箱.sldprt | 67.81K |
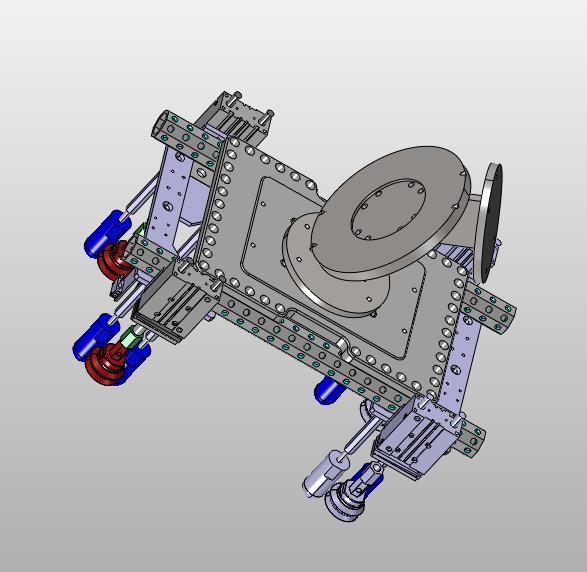
| 42 | 码垛机器人吸盘抓手.sldasm | 1.62M |
| 43 | 码垛机器人吸盘抓手.SLDDRW | 2.10M |
此图纸下载需要480金币
立即下载
发布者
科弈设计 代做毕设 kczx-3127350473
创作: 211
粉丝: 19
加入时间:2023-11-11

模型信息
图纸格式:dwg,sldprt,sldasm,slddrw
文件大小:12.22M
所需金币:480
上传时间:2024-06-17 17:26:39
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2023
标签
码垛机器人
吸盘抓手
三维模型
机械设计
CAD图纸
图纸简介
随着科技的发展,企业的生产能力也随之提高,由此,需要搬运的物料也越来越多,如果只靠人力去搬运的话,既不省时也不省力,同时在搬运的过程中也会产生一些危险,导致受伤、物料损坏等问题。运用搬运机械手,可以避免掉这些问题,不用人力去进行这些耗力且重复性的工作,节约了人力。本次课题主要针对码垛吸盘机械手进行研究。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多

0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)

0.png)


0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)

