
登录注册
一款简易SCARA机械手设计研究(ID:1467435)








| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17191989422181.rar | 217.54M |
| 2 | 总程序.cxp | 10.94K |
| 3 | 2020铝型材.SLDPRT | 143.50K |
| 4 | 2020铝型材80.SLDPRT | 149.50K |
| 5 | 2020铝型材90.SLDPRT | 149.50K |
| 6 | 42步进电机1.SLDPRT | 181.00K |
| 7 | 42电机座.SLDPRT | 194.50K |
| 8 | 60电机.SLDPRT | 205.50K |
| 9 | 86减速器新.SLDPRT | 292.00K |
| 10 | 86电机.SLDPRT | 363.50K |
| 11 | 上安装平台.SLDPRT | 193.00K |
| 12 | 减速器.SLDPRT | 213.50K |
| 13 | 华兴57步进.SLDPRT | 183.00K |
| 14 | 原42电机座.SLDPRT | 164.00K |
| 15 | 圆锥滚子轴承25.SLDPRT | 870.50K |
| 16 | 圆锥滚子轴承30.SLDPRT | 1005.50K |
| 17 | 垫片.SLDPRT | 246.00K |
| 18 | 大臂.SLDPRT | 272.00K |
| 19 | 大臂插轴.SLDPRT | 545.00K |
| 20 | 大臂联轴器.SLDPRT | 174.50K |
| 21 | 安装平台.SLDPRT | 280.50K |
| 22 | 导轨.SLDPRT | 287.50K |
| 23 | 小臂.SLDPRT | 390.00K |
| 24 | 小臂减速器.SLDPRT | 279.00K |
| 25 | 小臂垫圈.SLDPRT | 161.50K |
| 26 | 小臂垫套.SLDPRT | 179.50K |
| 27 | 小臂电机法兰.SLDPRT | 277.00K |
| 28 | 小臂联轴器12-14.SLDPRT | 166.50K |
| 29 | 小臂轴.SLDPRT | 388.00K |
| 30 | 小臂轴套.SLDPRT | 246.00K |
| 31 | 小臂轴改.SLDPRT | 308.50K |
| 32 | 底座.SLDPRT | 299.50K |
| 33 | 底座支架.SLDPRT | 143.50K |
| 34 | 控制面板.SLDDRW | 387.50K |
| 35 | 控制面板.SLDPRT | 174.50K |
| 36 | 新角件上.SLDPRT | 202.00K |
| 37 | 新角件下.SLDDRW | 436.50K |
| 38 | 新角件下.SLDPRT | 276.50K |
| 39 | 新角件边.SLDPRT | 152.50K |
| 40 | 末端执行装置.SLDASM | 269.78K |
| 41 | 末端电机座.SLDPRT | 259.00K |
| 42 | 末端端盖.SLDDRW | 401.50K |
| 43 | 末端端盖.SLDPRT | 245.50K |
| 44 | 末端角件.SLDPRT | 324.50K |
| 45 | 末端转轴.SLDDRW | 455.00K |
| 46 | 末端转轴.SLDPRT | 260.00K |
| 47 | 末端轴.SLDPRT | 376.50K |
| 48 | 末端轴座.SLDPRT | 197.50K |
| 49 | 末端长板.SLDPRT | 172.50K |
| 50 | 深沟球轴承17.SLDPRT | 664.00K |
| 51 | 深沟球轴承20.SLDPRT | 643.50K |
| 52 | 深沟球轴承30.SLDPRT | 670.50K |
| 53 | 滑块.SLDPRT | 201.00K |
| 54 | 端盖-副本.SLDPRT | 226.50K |
| 55 | 端盖.SLDPRT | 226.50K |
| 56 | 端盖2-副本.SLDPRT | 337.50K |
| 57 | 端盖2.SLDPRT | 200.50K |
| 58 | 端盖垫片-副本.SLDPRT | 169.50K |
| 59 | 端盖垫片.SLDPRT | 67.59K |
| 60 | 联轴器10-6.35.SLDPRT | 324.00K |
| 61 | 联轴器42.SLDPRT | 170.50K |
| 62 | 联轴器8-12.SLDPRT | 186.50K |
| 63 | 肋板.SLDPRT | 170.50K |
| 64 | 螺母.SLDPRT | 393.50K |
| 65 | 装配体1.SLDASM | 1.01M |
| 66 | 装配体1^装配体1.sldasm | 529.00K |
| 67 | 装配体2.SLDASM | 396.00K |
| 68 | 轴-副本.SLDPRT | 352.00K |
| 69 | 轴.SLDPRT | 361.50K |
| 70 | 轴头.SLDPRT | 265.50K |
| 71 | 轴套-副本.SLDPRT | 247.00K |
| 72 | 轴套.SLDPRT | 237.50K |
| 73 | 轴套2-副本.SLDPRT | 165.50K |
| 74 | 轴套2.SLDPRT | 191.00K |
| 75 | 轴承.SLDPRT | 147.00K |
| 76 | 轴端套-副本.SLDPRT | 223.50K |
| 77 | 轴端套.SLDPRT | 223.50K |
| 78 | 铜柱.SLDPRT | 181.50K |
| 79 | 键.SLDPRT | 355.50K |
| 80 | 键6.SLDPRT | 344.50K |
| 81 | 中期检查表.doc | 14.50K |
| 82 | 02012420.doc | 43.00K |
| 83 | 42电机座.PDF | 121.94K |
| 84 | 42电机座.SLDDRW | 460.00K |
| 85 | 42电机座改.PDF | 51.20K |
| 86 | 42电机座改.SLDDRW | 443.50K |
| 87 | scara机器人零件图.zip | 982.36K |
| 88 | 上安装平台.PDF | 50.21K |
| 89 | 上安装平台.SLDDRW | 402.00K |
| 90 | 大臂.PDF | 150.42K |
| 91 | 大臂.SLDDRW | 546.50K |
| 92 | 大臂插轴.PDF | 51.15K |
| 93 | 大臂插轴.SLDDRW | 509.50K |
| 94 | 大臂轴.PDF | 128.71K |
| 95 | 大臂轴.SLDDRW | 826.50K |
| 96 | 安装平台.PDF | 127.22K |
| 97 | 安装平台.SLDDRW | 653.00K |
| 98 | 小臂.PDF | 126.29K |
| 99 | 小臂.SLDDRW | 476.00K |
| 100 | 小臂垫套.PDF | 122.29K |
| 101 | 小臂垫套.SLDDRW | 396.50K |
| 102 | 小臂电机法兰.PDF | 128.56K |
| 103 | 小臂电机法兰.SLDDRW | 630.50K |
| 104 | 小臂轴.PDF | 126.01K |
| 105 | 小臂轴.SLDDRW | 623.50K |
| 106 | 小臂轴套.PDF | 149.77K |
| 107 | 小臂轴套.SLDDRW | 511.00K |
| 108 | 工程图.zip | 2.16M |
| 109 | 底座.SLDDRW | 525.00K |
| 110 | 末端电机座.PDF | 125.53K |
| 111 | 末端电机座.SLDDRW | 537.50K |
| 112 | 末端端盖.PDF | 125.19K |
| 113 | 末端端盖.SLDDRW | 515.00K |
| 114 | 末端角件.PDF | 126.00K |
| 115 | 末端角件.SLDDRW | 633.00K |
| 116 | 末端转轴.PDF | 127.54K |
| 117 | 末端转轴.SLDDRW | 593.00K |
| 118 | 末端长板.PDF | 114.40K |
| 119 | 末端长板.SLDDRW | 481.00K |
| 120 | 端盖2.PDF | 125.04K |
| 121 | 端盖2.SLDDRW | 496.00K |
| 122 | 端盖垫片.PDF | 123.50K |
| 123 | 端盖垫片.SLDDRW | 381.50K |
| 124 | 轴套2.PDF | 123.34K |
| 125 | 轴套2.SLDDRW | 434.00K |
| 126 | 42电机座.PDF | 48.27K |
| 127 | 大臂.PDF | 144.36K |
| 128 | 大臂轴.PDF | 59.04K |
| 129 | 安装平台.PDF | 51.55K |
| 130 | 小臂.PDF | 116.47K |
| 131 | 小臂电机法兰.PDF | 57.33K |
| 132 | 小臂轴.PDF | 119.11K |
| 133 | 小臂轴套.PDF | 74.86K |
| 134 | 末端电机座.PDF | 53.37K |
| 135 | 末端端盖.PDF | 53.24K |
| 136 | 末端转轴.PDF | 56.15K |
| 137 | 端盖2.PDF | 54.85K |
| 138 | 端盖垫片.PDF | 51.32K |
| 139 | 轴套2.PDF | 115.20K |
| 140 | 42电机座.PDF | 121.94K |
| 141 | 42电机座改.PDF | 51.20K |
| 142 | 上安装平台.PDF | 50.21K |
| 143 | 大臂.PDF | 150.42K |
| 144 | 大臂插轴.PDF | 51.15K |
| 145 | 大臂轴.PDF | 128.71K |
| 146 | 安装平台.PDF | 127.22K |
| 147 | 小臂.PDF | 126.29K |
| 148 | 小臂垫套.PDF | 122.29K |
| 149 | 小臂电机法兰.PDF | 128.56K |
| 150 | 小臂轴.PDF | 126.01K |
| 151 | 小臂轴套.PDF | 149.77K |
| 152 | 末端电机座.PDF | 125.53K |
| 153 | 末端端盖.PDF | 125.19K |
| 154 | 末端角件.PDF | 126.00K |
| 155 | 末端转轴.PDF | 127.54K |
| 156 | 末端长板.PDF | 114.40K |
| 157 | 端盖2.PDF | 125.04K |
| 158 | 端盖垫片.PDF | 123.50K |
| 159 | 轴套2.PDF | 123.34K |
| 160 | 毕业设计开题报告.doc | 90.00K |
| 161 | Master-slaveroboticplatmfomanditsfeasibilitystudyformicro-neurosurgery.pdf | 4.41M |
| 162 | 文献翻译.docx | 36.90K |
| 163 | 1.pdf | 193.35K |
| 164 | 2.pdf | 377.22K |
| 165 | 3.pdf | 366.09K |
| 166 | 4.pdf | 205.57K |
| 167 | 梯形图.zip | 1.06M |
| 168 | 电路.pdf | 140.93K |
| 169 | 1.pdf | 193.35K |
| 170 | 2.pdf | 377.22K |
| 171 | 3.pdf | 366.09K |
| 172 | 4.pdf | 205.57K |
| 173 | 毕业设计论文.doc | 25.98M |
| 174 | 电路.pdf | 140.93K |
| 175 | 一款简易SCARA机器人设计研究.pptx | 11.71M |
| 176 | 史陶比尔.mp4 | 42.50M |
| 177 | 坐标模式.mp4 | 72.89M |
| 178 | 工业应用-装配.f4v | 1.22M |
| 179 | 示教模式.mp4 | 42.63M |
| 180 | test输入通道控制.mtp | 292.91K |
此图纸下载需要340金币
立即下载
发布者
火星上的冷风
创作: 314
粉丝: 18
加入时间:2023-05-25

模型信息
图纸格式:sldprt,slddrw,sldasm,pdf
文件大小:222.77M
所需金币:340
上传时间:2024-06-24 11:17:06
是否可编辑:可修改,包括参数
版本:SOLIDWORKS
标签
图纸简介
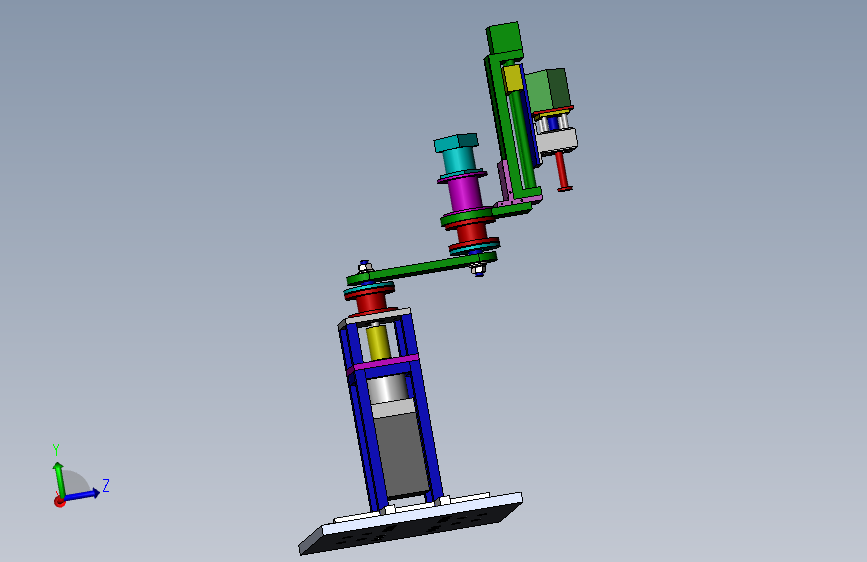
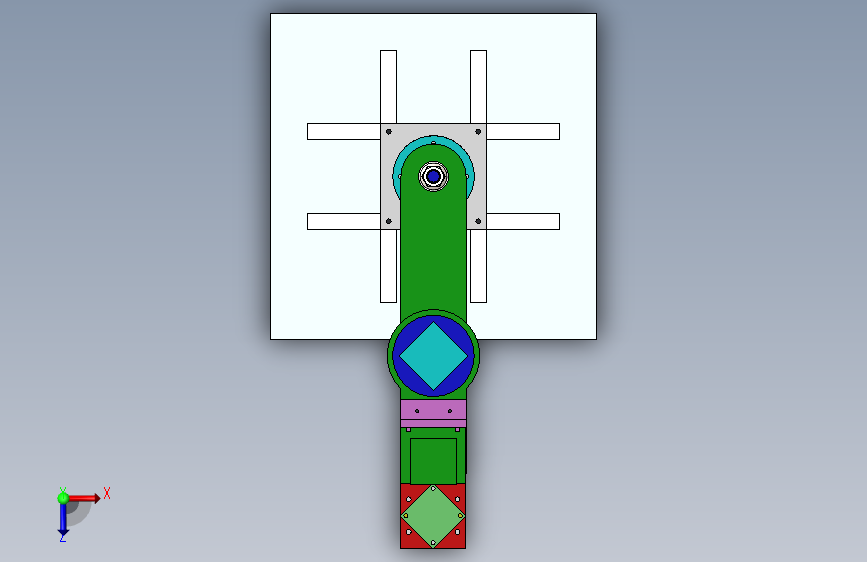
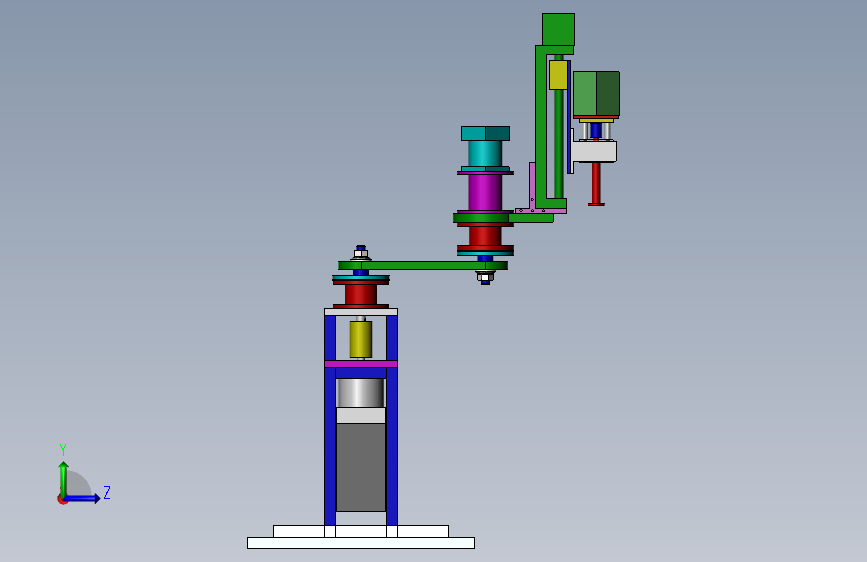
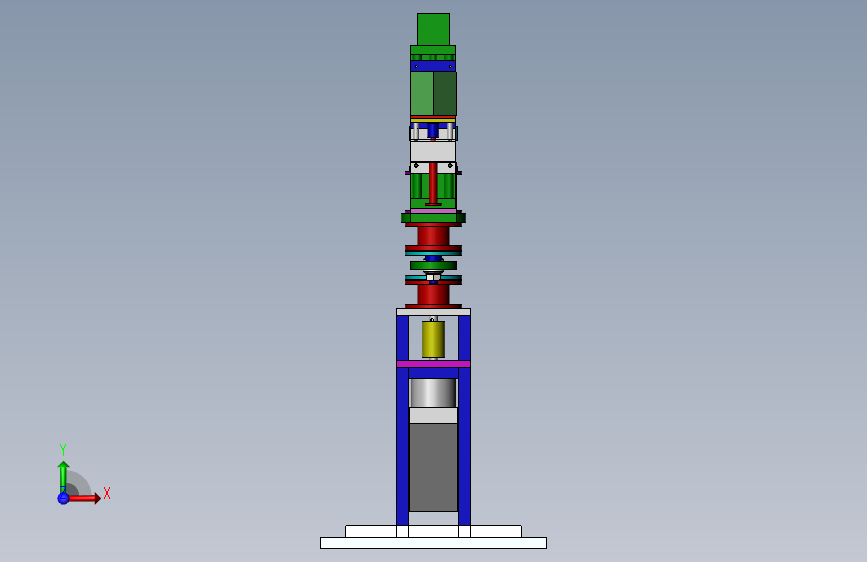
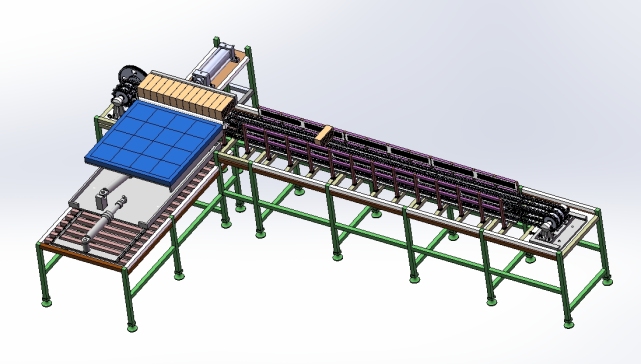
机器人产业作为新兴产业正在蓬勃发展中,但机器人居高不下的售价成为制约其发展的重要因素,而机器人的性能过剩正是机器人成本难以降低的原因之一。因此面向低精度工作的低成本机器人相较于其他专用型机器人或高精度机器人虽然性能有所下降,但是市场依旧广阔。同时低成本机器人投入市场,必将推动机器人在中小企业乃至手工业的应用,甚至将会促进机器人的平民化、个人化。
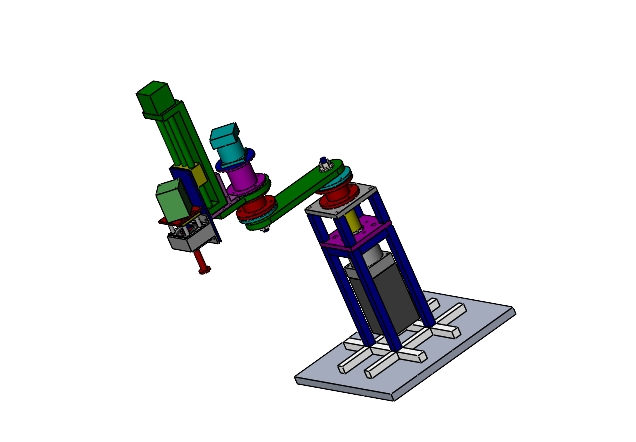
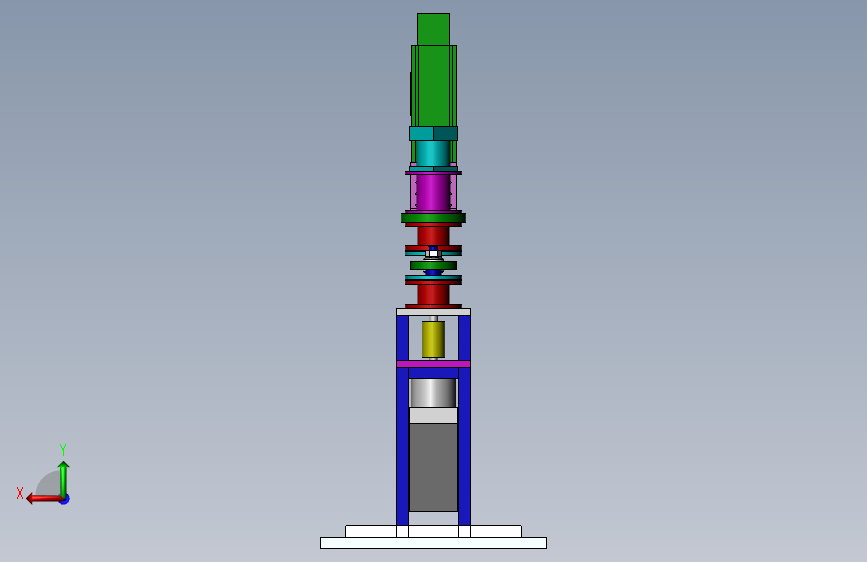
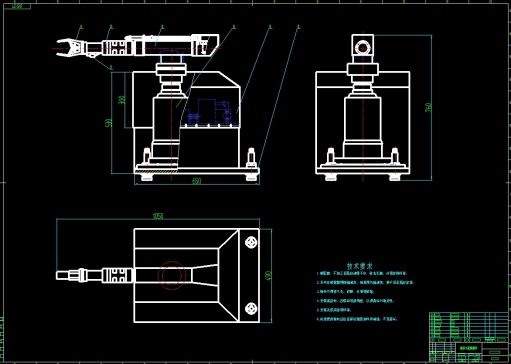
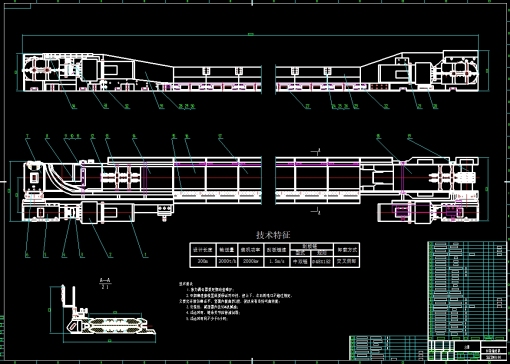
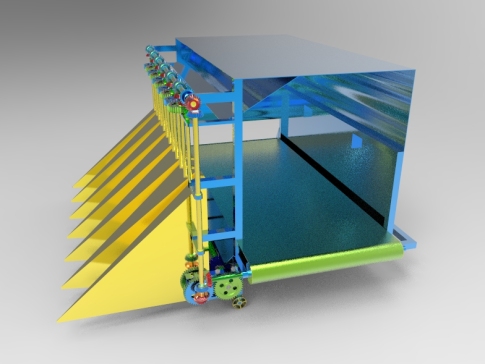
SCARA(Selective Compliance Assembly Robot Arm,中文译名:选择顺应性装配机器手臂)是一种采用圆柱坐标的特殊工业机器人,具有有3个轴线相互平行的旋转关节和1个直线移动关节。SCARA机器人是一种典型的4自由度平
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.jpg)
0.png)
0.jpg)
0.jpg)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)

