
登录注册
管道翻转机器人(ID:1471083)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17196285757243.zip | 9.82M |
| 2 | 51200轴承.prt | 524.00K |
| 3 | 61902轴承.prt | 752.00K |
| 4 | 6202轴承.prt | 600.00K |
| 5 | 下支撑板.prt | 216.50K |
| 6 | 丝杆.prt | 1.32M |
| 7 | 丝杆电机.prt | 540.00K |
| 8 | 丝杆螺母.prt | 692.00K |
| 9 | 中间连接板.prt | 205.00K |
| 10 | 前车组件.prt | 402.00K |
| 11 | 后车组件.prt | 404.50K |
| 12 | 夹紧臂.prt | 385.50K |
| 13 | 夹紧臂2.prt | 477.00K |
| 14 | 夹紧臂底座.prt | 211.00K |
| 15 | 带方形座轴承.prt | 307.00K |
| 16 | 总装.prt | 247.00K |
| 17 | 撑开架.prt | 192.00K |
| 18 | 支撑板.prt | 242.00K |
| 19 | 法兰连接件.prt | 237.50K |
| 20 | 法兰连接件2.prt | 263.50K |
| 21 | 电机支架.prt | 231.00K |
| 22 | 管道.prt | 130.50K |
| 23 | 联轴器.prt | 256.50K |
| 24 | 舵机.prt | 399.00K |
| 25 | 舵机支架.prt | 205.00K |
| 26 | 舵机法兰.prt | 433.50K |
| 27 | 舵机轴.prt | 377.00K |
| 28 | 行走轮.prt | 217.00K |
| 29 | 行走轮上支架.prt | 283.00K |
| 30 | 行走轮轴.prt | 172.00K |
| 31 | 行走轮连接架.prt | 271.00K |
| 32 | 车架体.prt | 304.50K |
| 33 | 转向驱动轮.prt | 184.50K |
| 34 | 转向驱动轮轴.prt | 173.00K |
| 35 | 载物架.prt | 242.00K |
| 36 | 连杆.prt | 144.00K |
| 37 | 锥齿轮1.prt | 684.00K |
| 38 | 锥齿轮2.prt | 1016.00K |
| 39 | 锥齿轮轴.prt | 162.00K |
| 40 | 齿轮M2-T15.prt | 592.00K |
| 41 | 齿轮M2-T20.prt | 724.00K |
此图纸下载需要260金币
立即下载
发布者
133****3547
创作: 381
粉丝: 23
加入时间:2023-08-24

模型信息
图纸格式:prt
文件大小:10.05M
所需金币:260
上传时间:2024-06-29 10:36:18
是否可编辑:可修改,包括参数
版本:UG NX 10
标签
图纸简介
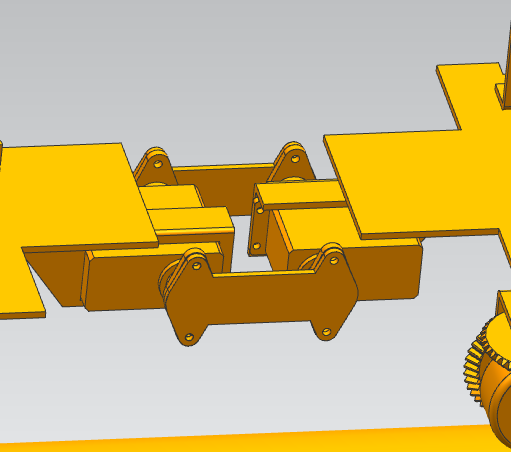
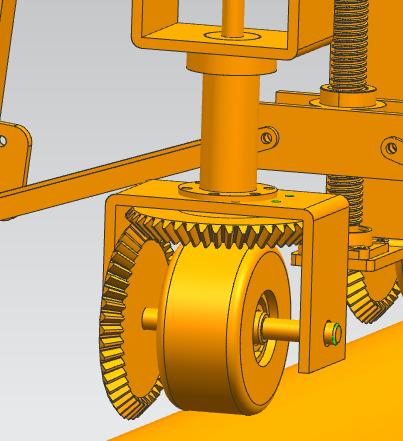
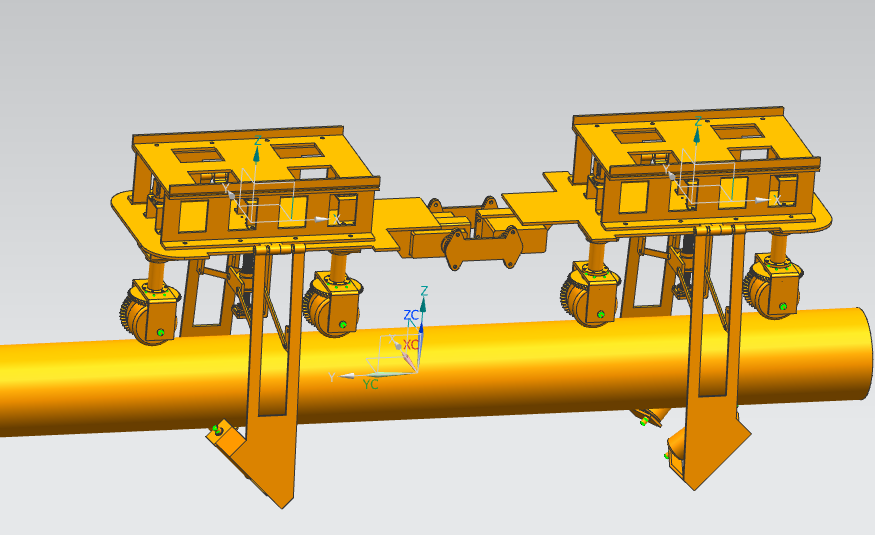
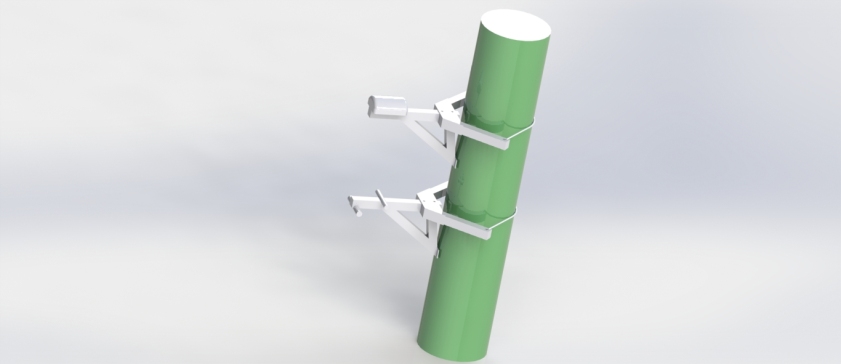
管道翻转机器人有前后两组机构组成,单个机构下都有锥齿轮驱动的轮子,两侧有丝杆驱动的夹紧装置,可以夹紧管道,保证机器人在管道上行走,两个机构中间有舵机驱动的翻转装置,遇到障碍物时可以翻转通过。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。


猜你喜欢
0.jpg)
0.jpg)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0_0_364.png)
0.png)

