
登录注册
Robot Studio机器人写字工作站(ID:1479010)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17202523541230.rar | 59.49M |
| 2 | 仿真视频.mp4 | 6.13M |
| 3 | 写字工作站.rspag | 647.75K |
| 4 | 基于RobotStudio机器人写字工作站设计.docx | 829.83K |
| 5 | 6轴3KGR600J1轴base.SLDPRT | 334.51K |
| 6 | 6轴3KGR600J1轴Basecover-1.SLDPRT | 466.30K |
| 7 | 6轴3KGR600J1轴Basecover-2.SLDPRT | 289.70K |
| 8 | 6轴3KGR600J1轴Basecover-3.SLDPRT | 464.70K |
| 9 | 6轴3KGR600J1轴Basecover.SLDPRT | 456.56K |
| 10 | 6轴3KGR600J1轴减速器输出法兰.SLDPRT | 366.08K |
| 11 | 6轴3KGR600J1轴减速器输出法盘.SLDPRT | 385.25K |
| 12 | 6轴3KGR600J1轴基准块.SLDPRT | 84.82K |
| 13 | 6轴3KGR600J1轴基座连接桶.SLDPRT | 391.72K |
| 14 | 6轴3KGR600J1轴底盖.SLDPRT | 154.55K |
| 15 | 6轴3KGR600J1轴挡线板.SLDPRT | 111.35K |
| 16 | 6轴3KGR600J1轴组件-4.SLDPRT | 83.38K |
| 17 | 6轴3KGR600J1轴缓冲胶圈.SLDPRT | 117.57K |
| 18 | 6轴3KGR600J1轴缓冲胶圈轴.SLDPRT | 84.07K |
| 19 | 6轴3KGR600J2轴主体.SLDPRT | 348.40K |
| 20 | 6轴3KGR600J2轴电机安装板.SLDPRT | 284.55K |
| 21 | 6轴3KGR600J3轴cover2.SLDPRT | 404.76K |
| 22 | 6轴3KGR600J3轴cover3.SLDPRT | 127.18K |
| 23 | 6轴3KGR600J3轴cover4.SLDPRT | 416.48K |
| 24 | 6轴3KGR600J3轴主体.SLDPRT | 493.35K |
| 25 | 6轴3KGR600J3轴电机cover-1.SLDPRT | 166.88K |
| 26 | 6轴3KGR600J4轴主体1.SLDPRT | 536.25K |
| 27 | 6轴3KGR600J4轴主体1cover.SLDPRT | 182.66K |
| 28 | 6轴3KGR600J4轴连接套.SLDPRT | 348.17K |
| 29 | 6轴3KGR600J4轴销轴.SLDPRT | 87.52K |
| 30 | 6轴3KGR600J5轴cover1.SLDPRT | 233.58K |
| 31 | 6轴3KGR600J5轴cover2.SLDPRT | 220.44K |
| 32 | 6轴3KGR600J5轴cover3.SLDPRT | 253.88K |
| 33 | 6轴3KGR600J5轴主体.SLDPRT | 276.50K |
| 34 | 6轴3KGR600J5轴减速器安装板.SLDPRT | 234.32K |
| 35 | 6轴3KGR600J6轴主体.SLDPRT | 299.05K |
| 36 | 6轴3KGR600J6轴电机cover.SLDPRT | 117.16K |
| 37 | 6轴3KG关节机械手.SLDASM | 13.78M |
| 38 | J1轴电机连接法兰.SLDPRT | 252.88K |
| 39 | J3轴减速机输入EBF22-S3M100-40-B-H-d8.SLDPRT | 321.88K |
| 40 | J3轴同步带.SLDPRT | 61.55K |
| 41 | J3轴法兰输入轴.SLDPRT | 118.02K |
| 42 | J3轴电机输出EBF22-S3M100-40-B-H-d11.SLDPRT | 324.27K |
| 43 | J3轴输出连接法兰.SLDPRT | 191.95K |
| 44 | J3轴连接法兰.SLDPRT | 279.13K |
| 45 | J3轴连接法兰端盖.SLDPRT | 175.34K |
| 46 | J4轴减速机输入连接法兰.SLDPRT | 294.22K |
| 47 | J4轴减速机输出法兰.sldprt | 140.69K |
| 48 | J5轴同步带.SLDPRT | 35.33K |
| 49 | J5轴法兰输入轴.SLDPRT | 116.61K |
| 50 | J5轴电机输入EBF02-S3M060-30-B-H-d6.SLDPRT | 279.03K |
| 51 | J5轴电机输出EBF02-S3M060-30-B-H-d8.SLDPRT | 283.41K |
| 52 | J5轴连接法兰.SLDPRT | 266.45K |
| 53 | J5轴连接法兰端盖.SLDPRT | 224.53K |
| 54 | LCD-14-XXX-C-I.SLDPRT | 2.14M |
| 55 | LHD-14-XXX-C-I.SLDPRT | 3.29M |
| 56 | LHS-17-XXX-C-I.SLDPRT | 1.83M |
| 57 | LHS-25-XXX-C-I.SLDPRT | 2.43M |
| 58 | 写字工作台.SLDPRT | 65.83K |
| 59 | 总装.SLDASM | 16.80M |
| 60 | 末端连接法兰(写字机器人).SLDPRT | 118.99K |
| 61 | 松下100W.SLDPRT | 556.86K |
| 62 | 松下200w.SLDPRT | 693.99K |
| 63 | 松下400w.SLDPRT | 555.43K |
| 64 | 松下50W.SLDPRT | 566.80K |
| 65 | 笔夹具.SLDPRT | 111.59K |
| 66 | 三维模型.png | 79.21K |
| 67 | 三维模型2.png | 105.82K |
| 68 | 三维模型3.png | 51.41K |
| 69 | 所有文件.png | 13.00K |
| 70 | 目录.png | 24.49K |
| 71 | 说明书.png | 10.53K |
| 72 | 说明书2.png | 111.45K |
| 73 | 说明书3.png | 126.57K |
此图纸下载需要600金币
立即下载
发布者
科弈设计 代做毕设 kczx-3127350473
创作: 211
粉丝: 20
加入时间:2023-11-11

模型信息
图纸格式:sldprt,sldasm
文件大小:60.91M
所需金币:600
上传时间:2024-07-06 15:52:48
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2022
标签
毕业设计
三维模型
设计说明书
图纸简介
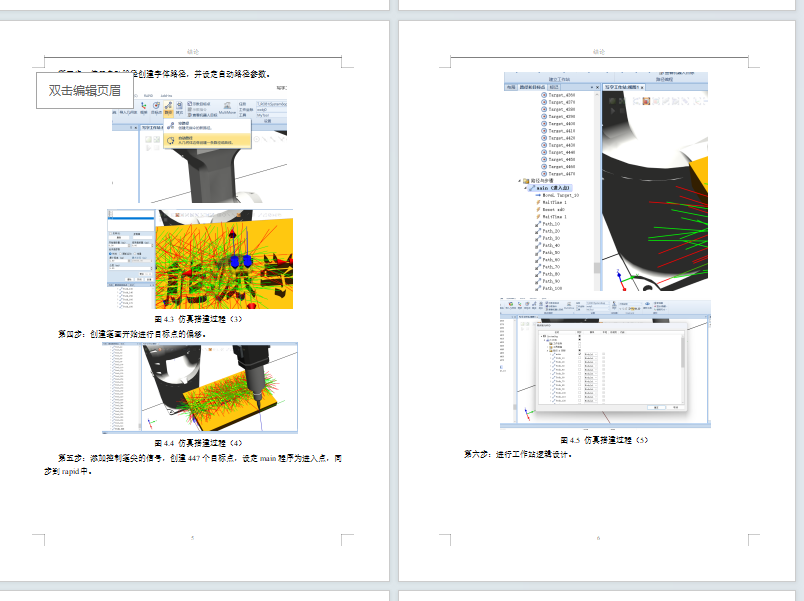
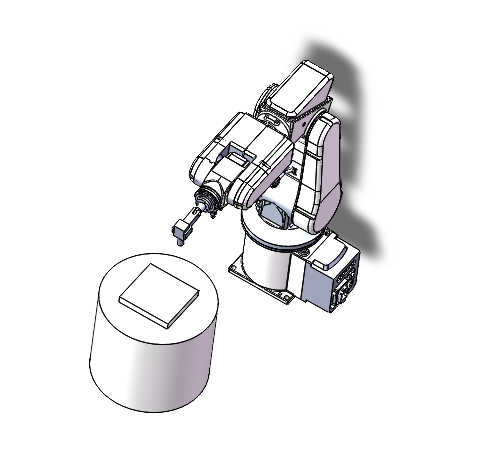
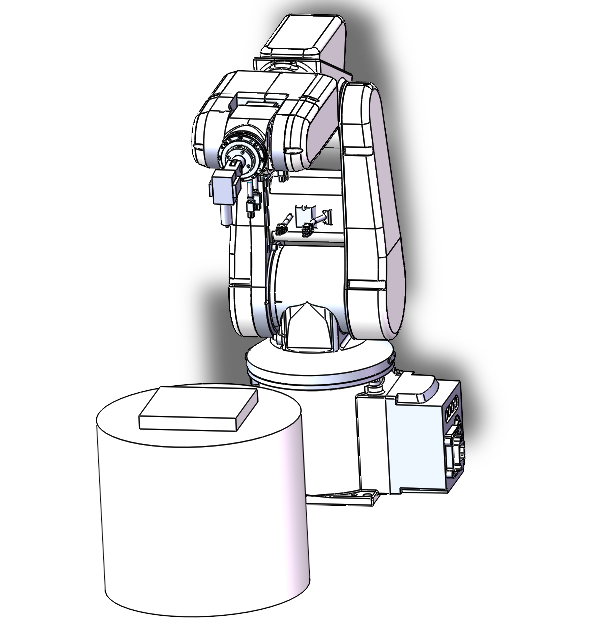
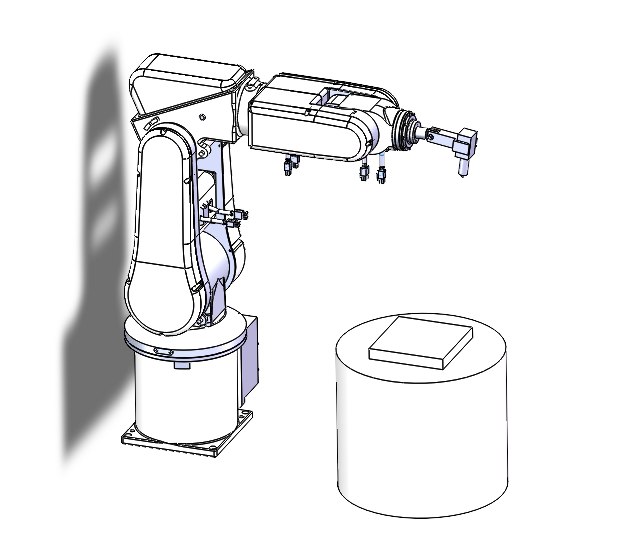
本文聚焦于机器人写字工作站的设计与仿真,以机器人码垛工作站为参照对象。研究中,我们选用了ABB公司开发的Robot Studio软件,该软件功能强大,包括Solidworks模型导入、路径规划、虚拟演示器、程序编辑器、事件表以及工具辅助等,为机器人码垛工作站的工作流程提供了全面的解决方案。设计过程中,我们首先将Robot Studio与Solidworks结合,构建出机器人写字工作站的三维模型。随后,利用Robot Studio的路径规划功能,为机器人设定了高效且准确的写字轨迹。通过虚拟演示器,我们可以预览机器人的写字过程,确保其在真实环境中的表现符合预期。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.jpg)
4.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

