
登录注册
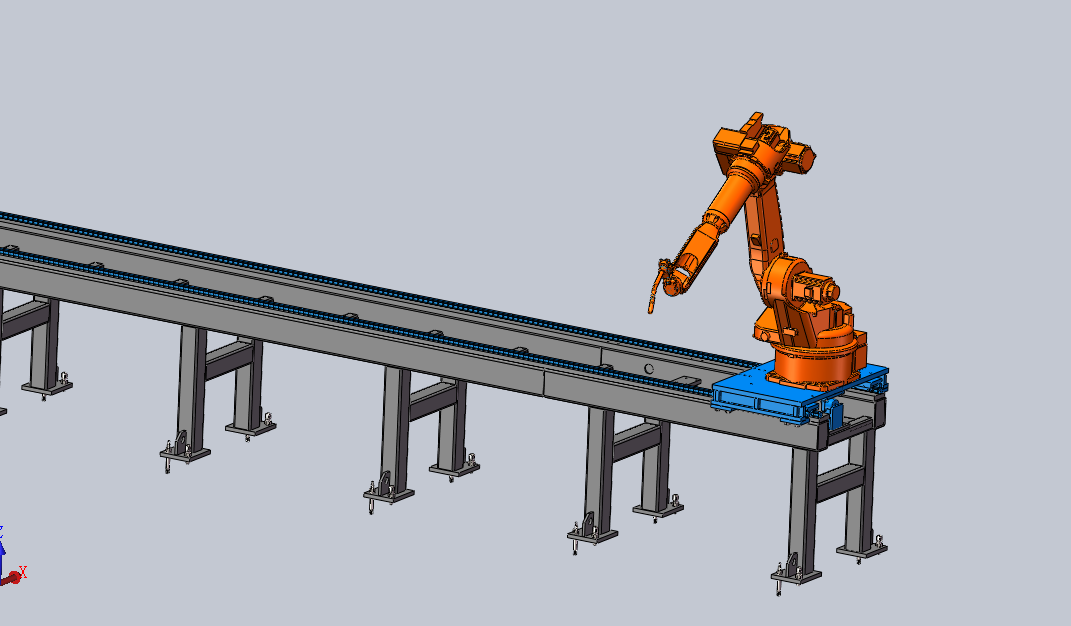
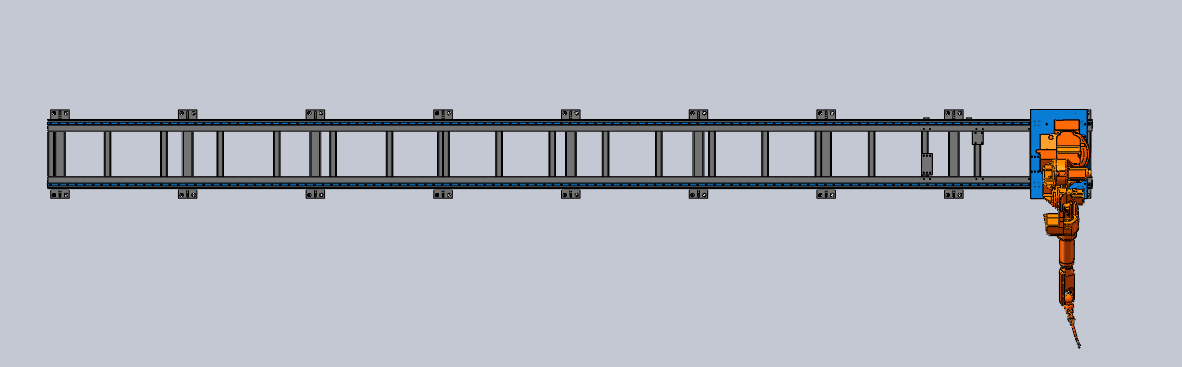
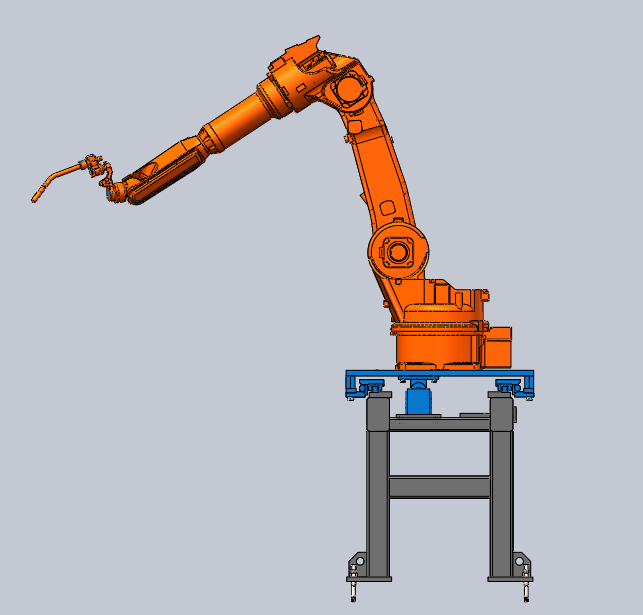
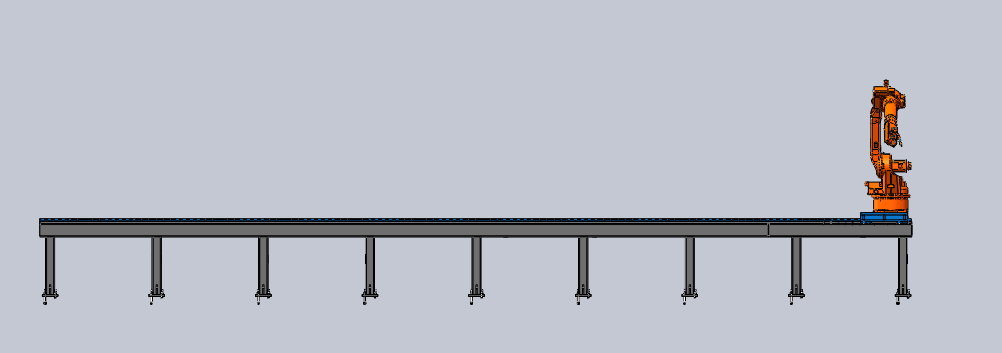
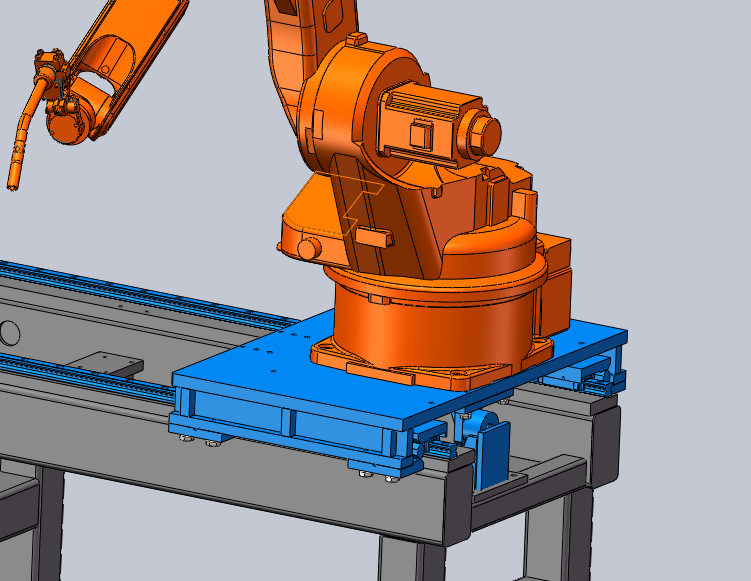
滑轨式移动机器人三维(ID:1506477)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17221417192778.zip | 14.36M |
| 2 | BASE-06.sldprt | 179.42K |
| 3 | CJ-M16X150__-06.sldprt | 105.86K |
| 4 | D10X20_GB120__-06.sldprt | 27.07K |
| 5 | D10X40_GB120__-06.sldprt | 26.78K |
| 6 | D12_GB93__-06.sldprt | 72.14K |
| 7 | D12_GB93__.sldprt | 72.55K |
| 8 | D12_GB97_1__-06.sldprt | 60.58K |
| 9 | D12_GB97_1__.sldprt | 59.96K |
| 10 | D16_GB93__-06.sldprt | 27.08K |
| 11 | GB70-M8X16-12_9__-06.sldprt | 32.73K |
| 12 | GB70-M8X30-12_9__-06.sldprt | 32.95K |
| 13 | GB9074_13-88_M12X30_ASM-06.sldasm | 51.00K |
| 14 | GB9074_13-88_M12X40_ASM-06.sldasm | 50.12K |
| 15 | LINK1-06.sldprt | 230.96K |
| 16 | LINK1_MOT-06.sldprt | 90.17K |
| 17 | LINK2-06.sldprt | 315.64K |
| 18 | LINK3-06.sldprt | 477.40K |
| 19 | LINK3_J3MOT-06.sldprt | 82.65K |
| 20 | LINK3_J4MOT-06.sldprt | 98.28K |
| 21 | LINK4-06.sldprt | 335.55K |
| 22 | LINK5-06.sldprt | 47.20K |
| 23 | LINK6-06.sldprt | 26.53K |
| 24 | M12X30_GB5783__-06.sldprt | 34.99K |
| 25 | M12X40_GB5783__-06.sldprt | 35.50K |
| 26 | M12X40_GB70__-06.sldprt | 33.88K |
| 27 | M16X40_GB5783__-06.sldprt | 34.86K |
| 28 | M16X40_GB5783___ASM-06.sldasm | 32.56K |
| 29 | M20X70_GB83__-06.sldprt | 34.12K |
| 30 | M20_GB6170__-06.sldprt | 36.37K |
| 31 | NV6L_ASM-06.sldasm | 2.41M |
| 32 | RA48901060100-01_01-06.sldprt | 27.73K |
| 33 | RA48901060100-01_02-06.sldprt | 94.64K |
| 34 | RA48901060100-01_03-06.sldprt | 28.66K |
| 35 | RA48901060100-01_04-06.sldprt | 29.20K |
| 36 | RA48901060100-01_05-06.sldprt | 28.75K |
| 37 | RA48901060100-01_06_AF0-06.sldprt | 28.15K |
| 38 | RA48901060100-01_06_AF1-06.sldprt | 28.34K |
| 39 | RA48901060100-01_11-06.sldprt | 27.62K |
| 40 | RA48901060100-01_ASM-06.sldasm | 177.71K |
| 41 | RA48901060100-01_RECTANGULAR_15-06.sldprt | 70.55K |
| 42 | RA48901060100-01_RECTANGULA_AF0-06.sldprt | 72.73K |
| 43 | RA48901060100-01_SQUARE_TUBE_14-06.sldprt | 31.97K |
| 44 | RA48901060100-01_SQUARE_TUB_AF0-06.sldprt | 31.90K |
| 45 | RA48901060100-02_01-06.sldprt | 32.43K |
| 46 | RA48901060100-02_02-06.sldprt | 30.05K |
| 47 | RA48901060100-02_03-06.sldprt | 28.51K |
| 48 | RA48901060100-02_04-06.sldprt | 27.31K |
| 49 | RA48901060100-02_ASM-06.sldasm | 98.57K |
| 50 | RA48901060100-03_01_AF0-06.sldprt | 105.96K |
| 51 | RA48901060100-03_02_AF0-06.sldprt | 28.52K |
| 52 | RA48901060100-03_02_AF1-06.sldprt | 28.92K |
| 53 | RA48901060100-03_03_AF0-06.sldprt | 41.25K |
| 54 | RA48901060100-03_03_AF1-06.sldprt | 41.94K |
| 55 | RA48901060100-03_04_AF3-06.sldprt | 37.93K |
| 56 | RA48901060100-03_ASM-06.sldasm | 112.74K |
| 57 | RA48901060100-07_01-06.sldprt | 30.39K |
| 58 | RA48901060100-07_02-06.sldprt | 26.55K |
| 59 | RA48901060100-07_03-06.sldprt | 28.29K |
| 60 | RA48901060100-07_ASM-06.sldasm | 32.98K |
| 61 | RA48901060100-08_01_AF0-06.sldprt | 29.99K |
| 62 | RA48901060100-08_02-06.sldprt | 28.29K |
| 63 | RA48901060100-08_03-06.sldprt | 27.37K |
| 64 | RA48901060100-08_ASM-06.sldasm | 33.20K |
| 65 | RA48901060100-09-06.sldprt | 26.13K |
| 66 | RA48901060100-17-06.sldprt | 28.00K |
| 67 | TA-1400_14-07-06.SLDPRT | 1.57M |
| 68 | THK-HSR30R-1100___ASM-06.sldasm | 275.30K |
| 69 | THK-HSR30R-DG-1100__-06.sldprt | 584.77K |
| 70 | THK-HSR30R-HK__-06.sldprt | 2.37M |
| 71 | ~$BASE-06.sldprt | 6B |
| 72 | ~$CJ-M16X150__-06.sldprt | 6B |
| 73 | ~$D10X20_GB120__-06.sldprt | 6B |
| 74 | ~$D10X40_GB120__-06.sldprt | 6B |
| 75 | ~$D12_GB93__-06.sldprt | 6B |
| 76 | ~$D12_GB93__.sldprt | 6B |
| 77 | ~$D12_GB97_1__-06.sldprt | 6B |
| 78 | ~$D12_GB97_1__.sldprt | 6B |
| 79 | ~$D16_GB93__-06.sldprt | 6B |
| 80 | ~$GB70-M8X16-12_9__-06.sldprt | 6B |
| 81 | ~$GB70-M8X30-12_9__-06.sldprt | 6B |
| 82 | ~$GB9074_13-88_M12X30_ASM-06.sldasm | 6B |
| 83 | ~$GB9074_13-88_M12X40_ASM-06.sldasm | 6B |
| 84 | ~$LINK1-06.sldprt | 6B |
| 85 | ~$LINK1_MOT-06.sldprt | 6B |
| 86 | ~$LINK2-06.sldprt | 6B |
| 87 | ~$LINK3-06.sldprt | 6B |
| 88 | ~$LINK3_J3MOT-06.sldprt | 6B |
| 89 | ~$LINK3_J4MOT-06.sldprt | 6B |
| 90 | ~$LINK4-06.sldprt | 6B |
| 91 | ~$LINK5-06.sldprt | 6B |
| 92 | ~$LINK6-06.sldprt | 6B |
| 93 | ~$M12X30_GB5783__-06.sldprt | 6B |
| 94 | ~$M12X40_GB5783__-06.sldprt | 6B |
| 95 | ~$M12X40_GB70__-06.sldprt | 6B |
| 96 | ~$M16X40_GB5783__-06.sldprt | 6B |
| 97 | ~$M16X40_GB5783___ASM-06.sldasm | 6B |
| 98 | ~$M20X70_GB83__-06.sldprt | 6B |
| 99 | ~$M20_GB6170__-06.sldprt | 6B |
| 100 | ~$NV6L_ASM-06.sldasm | 6B |
| 101 | ~$RA48901060100-01_01-06.sldprt | 6B |
| 102 | ~$RA48901060100-01_02-06.sldprt | 6B |
| 103 | ~$RA48901060100-01_03-06.sldprt | 6B |
| 104 | ~$RA48901060100-01_04-06.sldprt | 6B |
| 105 | ~$RA48901060100-01_05-06.sldprt | 6B |
| 106 | ~$RA48901060100-01_06_AF0-06.sldprt | 6B |
| 107 | ~$RA48901060100-01_06_AF1-06.sldprt | 6B |
| 108 | ~$RA48901060100-01_11-06.sldprt | 6B |
| 109 | ~$RA48901060100-01_ASM-06.sldasm | 6B |
| 110 | ~$RA48901060100-01_RECTANGULAR_15-06.sldprt | 6B |
| 111 | ~$RA48901060100-01_RECTANGULA_AF0-06.sldprt | 6B |
| 112 | ~$RA48901060100-01_SQUARE_TUBE_14-06.sldprt | 6B |
| 113 | ~$RA48901060100-01_SQUARE_TUB_AF0-06.sldprt | 6B |
| 114 | ~$RA48901060100-02_01-06.sldprt | 6B |
| 115 | ~$RA48901060100-02_02-06.sldprt | 6B |
| 116 | ~$RA48901060100-02_03-06.sldprt | 6B |
| 117 | ~$RA48901060100-02_04-06.sldprt | 6B |
| 118 | ~$RA48901060100-02_ASM-06.sldasm | 6B |
| 119 | ~$RA48901060100-03_01_AF0-06.sldprt | 6B |
| 120 | ~$RA48901060100-03_02_AF0-06.sldprt | 6B |
| 121 | ~$RA48901060100-03_02_AF1-06.sldprt | 6B |
| 122 | ~$RA48901060100-03_03_AF0-06.sldprt | 6B |
| 123 | ~$RA48901060100-03_03_AF1-06.sldprt | 6B |
| 124 | ~$RA48901060100-03_04_AF3-06.sldprt | 6B |
| 125 | ~$RA48901060100-03_ASM-06.sldasm | 6B |
| 126 | ~$RA48901060100-07_01-06.sldprt | 6B |
| 127 | ~$RA48901060100-07_02-06.sldprt | 6B |
| 128 | ~$RA48901060100-07_03-06.sldprt | 6B |
| 129 | ~$RA48901060100-07_ASM-06.sldasm | 6B |
| 130 | ~$RA48901060100-08_01_AF0-06.sldprt | 6B |
| 131 | ~$RA48901060100-08_02-06.sldprt | 6B |
| 132 | ~$RA48901060100-08_03-06.sldprt | 6B |
| 133 | ~$RA48901060100-08_ASM-06.sldasm | 6B |
| 134 | ~$RA48901060100-09-06.sldprt | 6B |
| 135 | ~$RA48901060100-17-06.sldprt | 6B |
| 136 | ~$TA-1400_14-07-06.SLDPRT | 6B |
| 137 | ~$THK-HSR30R-1100___ASM-06.sldasm | 6B |
| 138 | ~$THK-HSR30R-DG-1100__-06.sldprt | 6B |
| 139 | ~$THK-HSR30R-HK__-06.sldprt | 6B |
| 140 | ~$加高方通006.SLDPRT | 6B |
| 141 | ~$支撑方通016.SLDPRT | 6B |
| 142 | ~$滑轨式移动机器人.sldasm | 6B |
| 143 | ~$镜向RA48901060100-01_02-06.sldprt | 6B |
| 144 | 加高方通006.SLDPRT | 76.93K |
| 145 | 支撑方通016.SLDPRT | 78.47K |
| 146 | 滑轨式移动机器人.sldasm | 3.21M |
| 147 | 镜向RA48901060100-01_02-06.sldprt | 49.45K |
此图纸下载需要75金币
立即下载
发布者
背后的大象
创作: 50
粉丝: 3
加入时间:2024-06-03

模型信息
图纸格式:sldprt,sldasm
文件大小:14.71M
所需金币:75
上传时间:2024-07-28 12:42:04
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2018
标签
移动机器人
滑轨机器人
焊接机器人生产线
机器人生产线
图纸简介
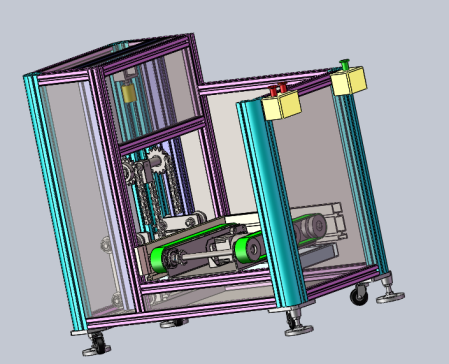
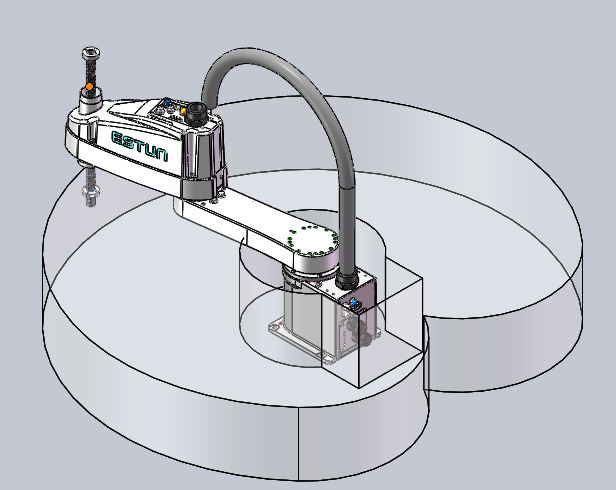
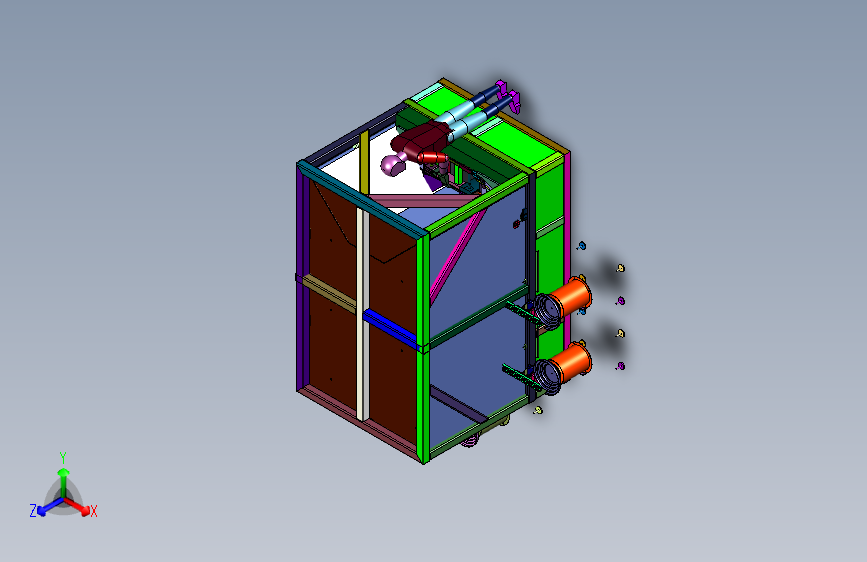
滑轨式移动机器人,通过平行滑轨,搭载六轴机器人,实现7个自由度,根据移动精度,可选择齿轮传动、丝杠传动,同步带传动作为驱动,可完成焊接。装配工序,该模型完整,也可优化,用于不同项目。供广大工程师参考、借鉴!
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)

