
登录注册
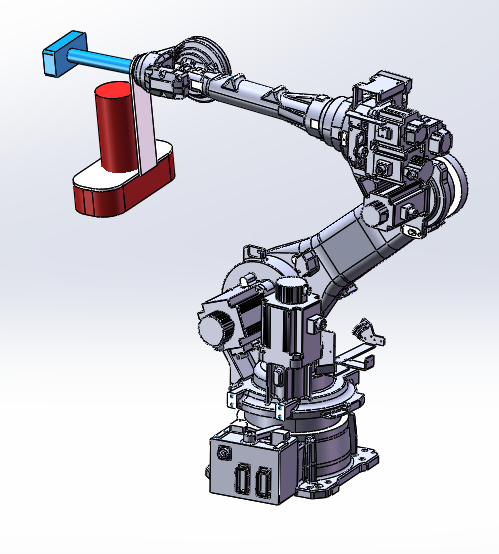
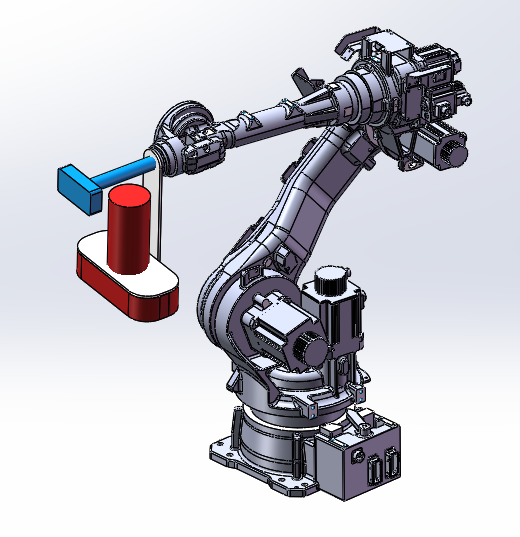
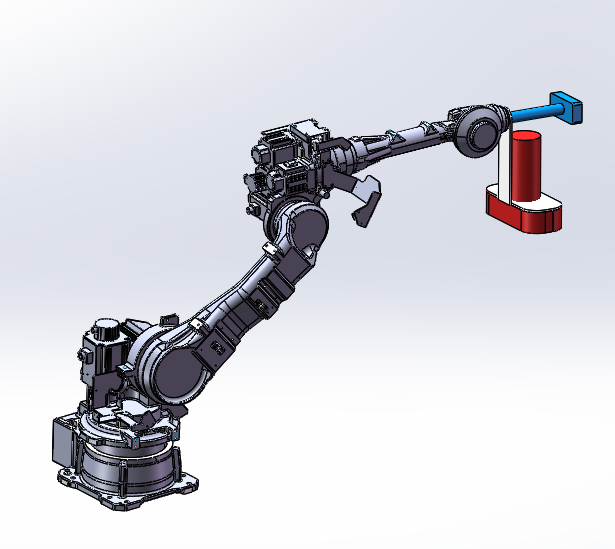
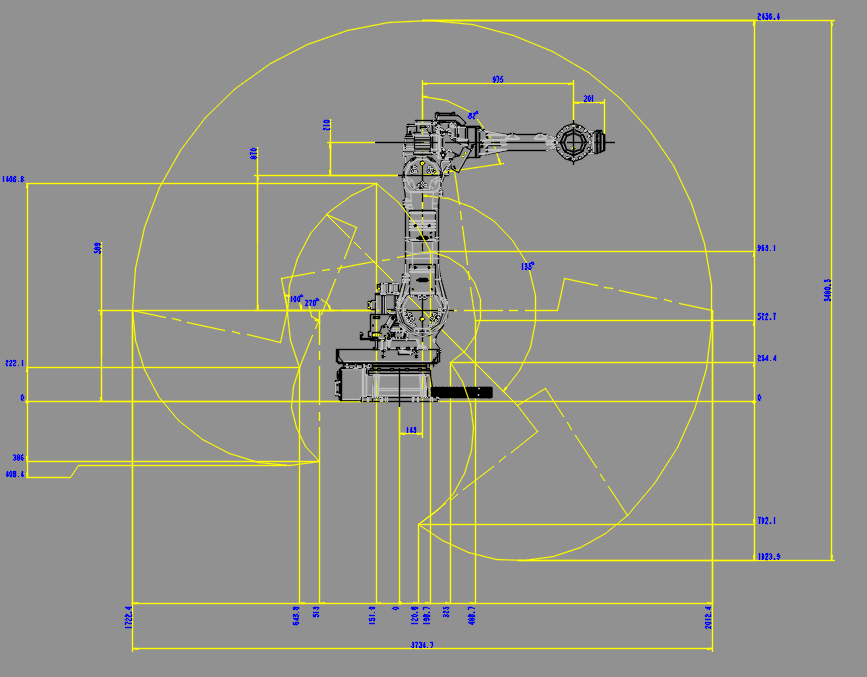
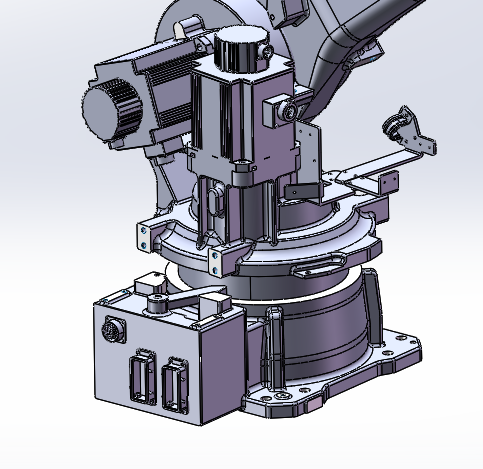
钱江QJR50-1机器人(模型可拖动)(ID:1510272)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 25a6c9130f19e9bbc9e299accc4933d.png | 165.55K |
| 2 | 4ab57e2eca4f3b2f8b54c41596ecf14.png | 68.09K |
| 3 | 594cc57ac9f82cbdfe4d3f3490cf655.png | 129.96K |
| 4 | afa9834e8c0b2dc4d28360be76fd181.png | 149.54K |
| 5 | b21984d5515ae3ca10ba540c5967eac.png | 153.36K |
| 6 | ef2625714813fddd31f8a527755616f.png | 152.32K |
| 7 | 010008860000_ASM^QJR50-12_QJR50-1.SLDASM | 13.67M |
| 8 | 010018860000^010008860000_ASM_QJR50-12_QJR50-1.SLDPRT | 2.90M |
| 9 | 010028860000^010008860000_ASM_QJR50-12_QJR50-1.SLDPRT | 10.90M |
| 10 | 020018860000^020008860000_ASM_QJR50-12_QJR50-1.SLDPRT | 2.76M |
| 11 | 030008860000_ASM^QJR50-12_QJR50-1.SLDPRT | 8.77M |
| 12 | 040018860000^040008860000_ASM_QJR50-12_QJR50-1.SLDPRT | 1.94M |
| 13 | 040028860000^040008860000_ASM_QJR50-12_QJR50-1.SLDPRT | 2.07M |
| 14 | QJR50-1-BUXIAN_ASM^QJR50-12_QJR50-1.SLDASM | 20.73M |
| 15 | QJR50-1钱江可拖动.SLDASM | 14.16M |
| 16 | 吸盘.SLDPRT | 125.87K |
| 17 | 吸盘支架.SLDPRT | 78.50K |
| 18 | 摄像头.SLDPRT | 132.98K |
| 19 | QJR50-1末端安装尺寸图2019.8.23.dwg | 156.08K |
| 20 | QJR50-1机器人底座安装尺寸图.dwg | 65.42K |
| 21 | QJR50-1机器人活动范围图.dwg | 1.30M |
此图纸下载需要100金币
立即下载
发布者
仙人掌设计
创作: 334
粉丝: 22
加入时间:2022-11-04

模型信息
图纸ID:1510272
图纸格式:sldasm,sldprt,dwg
文件大小:80.99M
所需金币:100
上传时间:2024-07-31 20:48:40
是否可编辑:可修改,包括参数
软件版本:SOLIDWORKS 2022
标签
图纸简介
有效载荷50kg,臂展2米,设计结构紧凑,可灵活选择地面安装或倒置安装。.工作空间大、运行速度快、重复定位精度高,适用于焊接、喷涂、上下料、搬运、分拣、装配等应用,适用范围广。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)

0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

