
登录注册
仿生机械马(说明书+三维图)(ID:1515581)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17231100378647.zip | 5.79M |
| 2 | 四足仿生机器马设计说明书.doc | 5.04M |
| 3 | ABD.stp | 38.30K |
| 4 | abd__out.log.1 | 4.49K |
| 5 | AO.stp | 33.81K |
| 6 | ao__out.log.1 | 4.49K |
| 7 | CBE.stp | 27.78K |
| 8 | cbe__out.log.1 | 4.49K |
| 9 | FGH.stp | 38.32K |
| 10 | fgh__out.log.1 | 4.49K |
| 11 | GD.stp | 31.91K |
| 12 | gd__out.log.1 | 4.54K |
| 13 | HIJ.stp | 27.82K |
| 14 | hij__out.log.1 | 4.49K |
| 15 | IE.stp | 32.27K |
| 16 | ie__out.log.1 | 4.54K |
| 17 | M4螺栓.stp | 35.80K |
| 18 | m4螺栓__out.log.1 | 4.89K |
| 19 | OFC.stp | 37.53K |
| 20 | ofc__out.log.1 | 4.49K |
| 21 | 电机.stp | 572.16K |
| 22 | 电机__out.log.1 | 4.60K |
| 23 | 皮带.stp | 33.09K |
| 24 | 皮带2.stp | 33.07K |
| 25 | 皮带2__out.log.1 | 4.49K |
| 26 | 皮带__out.log.1 | 4.49K |
| 27 | 皮带轮.stp | 60.53K |
| 28 | 皮带轮__out.log.1 | 4.55K |
| 29 | 脚块.stp | 716.15K |
| 30 | 脚块__out.log.1 | 4.55K |
| 31 | 腿1.stp | 1007.15K |
| 32 | 腿1__out.log.1 | 4.95K |
| 33 | 腿2.stp | 1007.31K |
| 34 | 腿2__out.log.1 | 4.95K |
| 35 | 装配体.stp | 1.91M |
| 36 | 装配体__out.log.1 | 5.46K |
| 37 | 身体.stp | 43.69K |
| 38 | 身体__out.log.1 | 4.55K |
| 39 | 转轴.stp | 54.40K |
| 40 | 转轴2.stp | 54.24K |
| 41 | 转轴2__out.log.1 | 4.55K |
| 42 | 转轴__out.log.1 | 4.55K |
此图纸下载需要200金币
立即下载
发布者
代做机械毕设和专利设计指导,可联加威18292095705
创作: 183
粉丝: 6
加入时间:2022-07-27
模型信息
图纸格式:stp
文件大小:5.93M
所需金币:200
上传时间:2024-08-08 17:40:38
是否可编辑:可修改,包括参数
版本:STEP
标签
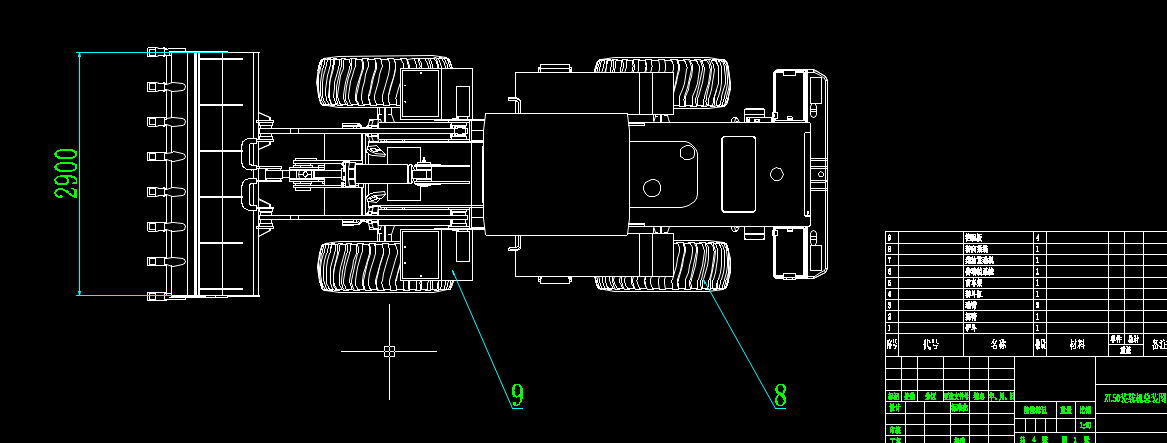
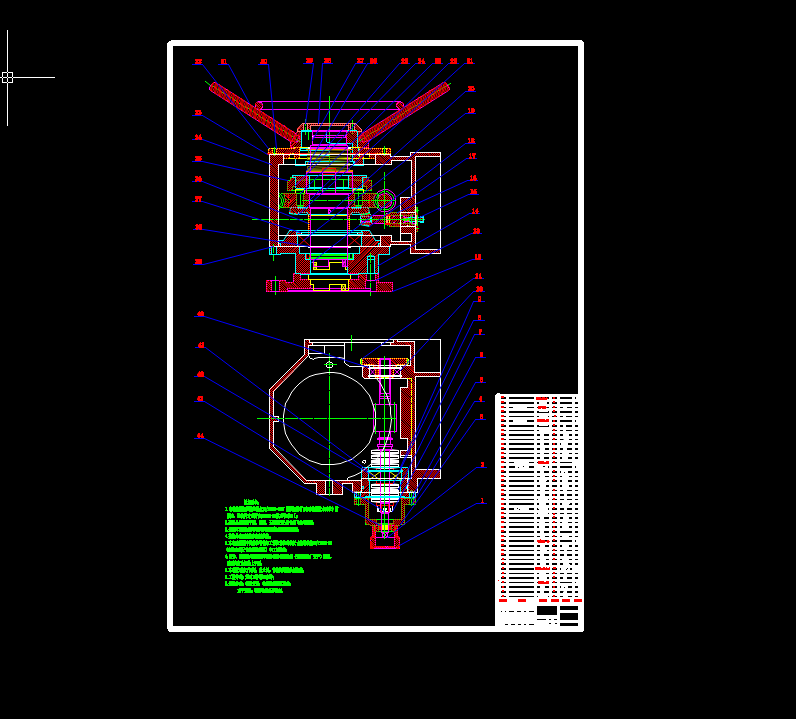
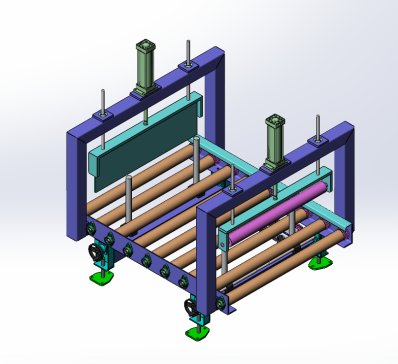
仿生机械马
图纸简介
动物步态研究在近年来是人类结构与仿生科学研究的重点,是对其他学科方面深入研究的重要基石。动物步态研究的重点在于对马动物生理特征的深入研究。该项目主要对马及其跑步形态进行了研究,并利用网络信息技术检索马在平地的跑步情况,对马走路时的身体步法和步态特征进行了研究,并在此基础上研究仿真了仿马四足步行机关,对于未来的仿生机器人技术开发和使用具有重大科学理论含义。
本课题通过对人马步态研究,得到了如下结果:
1.通过网络检索马在平原的活动情况,获取马在平面活动所需要的实验资料,并对资料进行分类整理,得出:马在平原活动过程中,相应的周期步态特性参数和各腿腿部活动幅度的曲线及其变化规律。发现:在平地时,由于
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)

