
登录注册
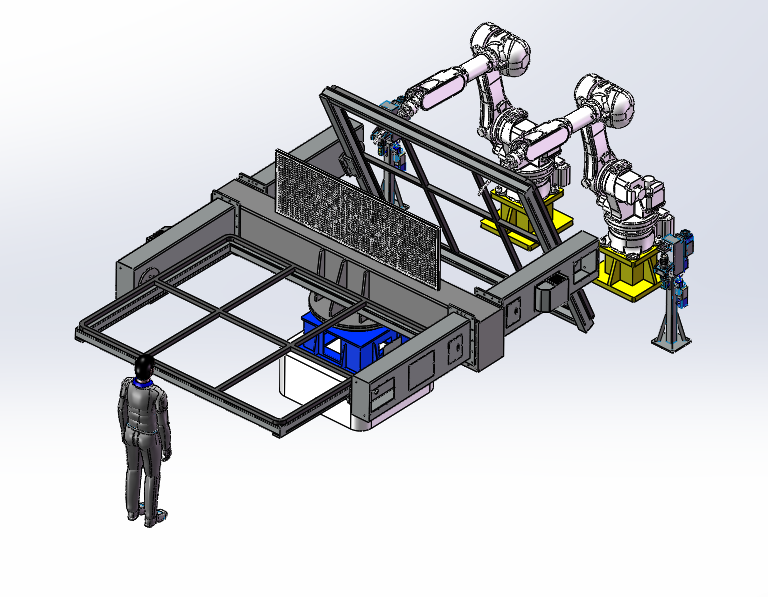
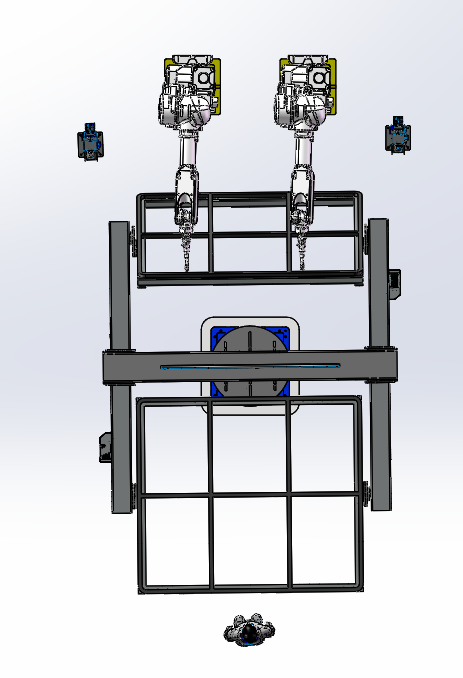
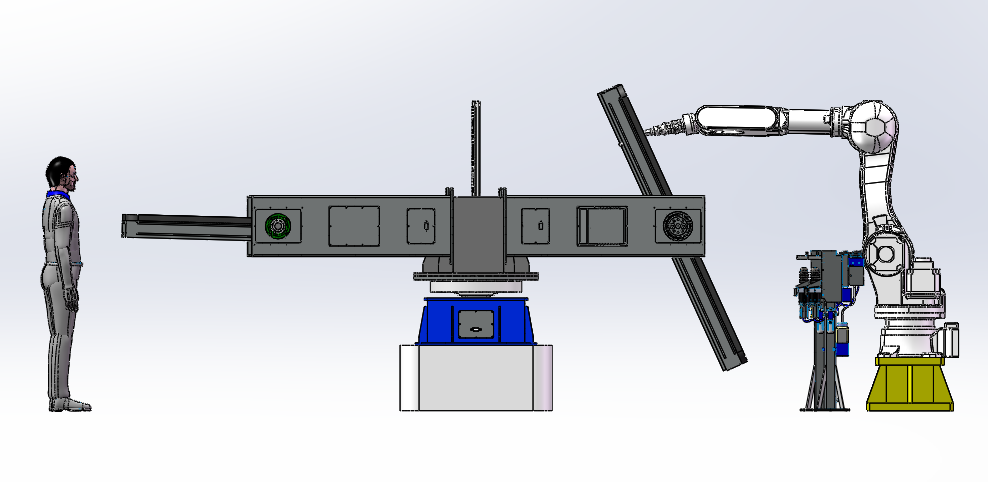
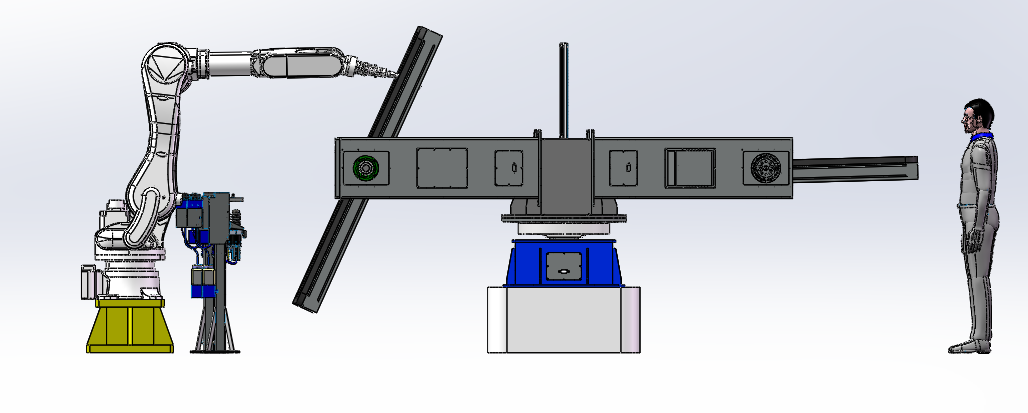
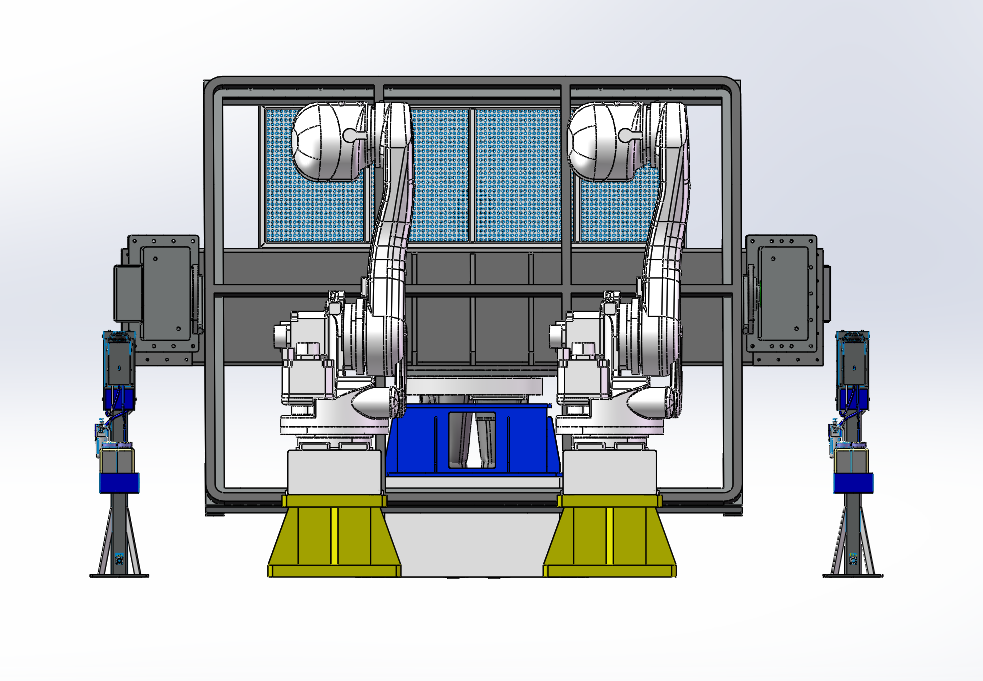
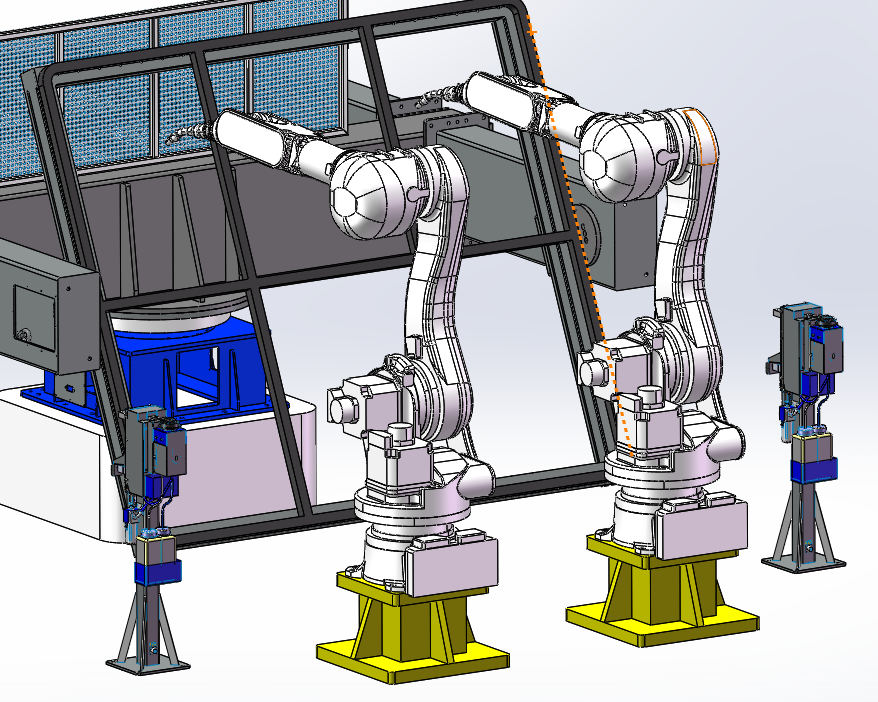
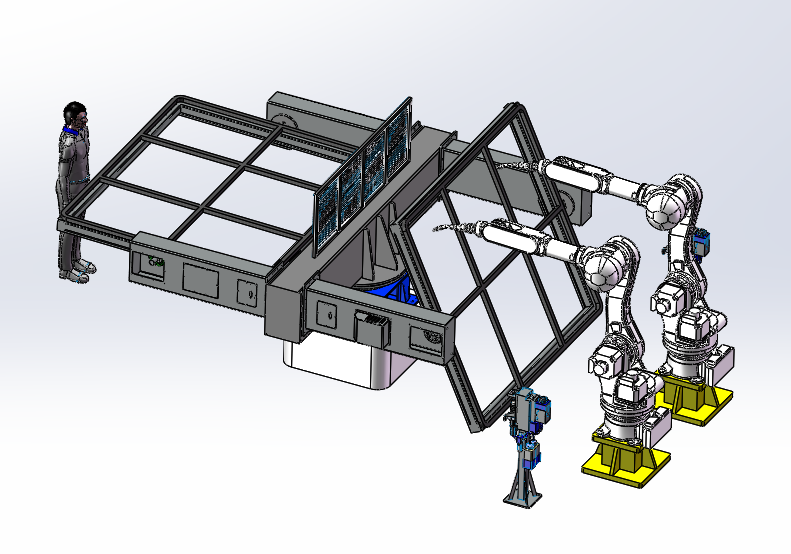
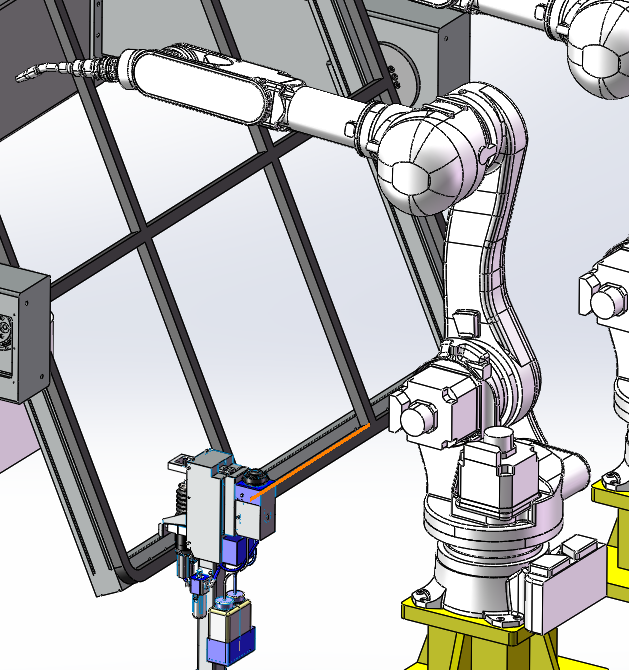
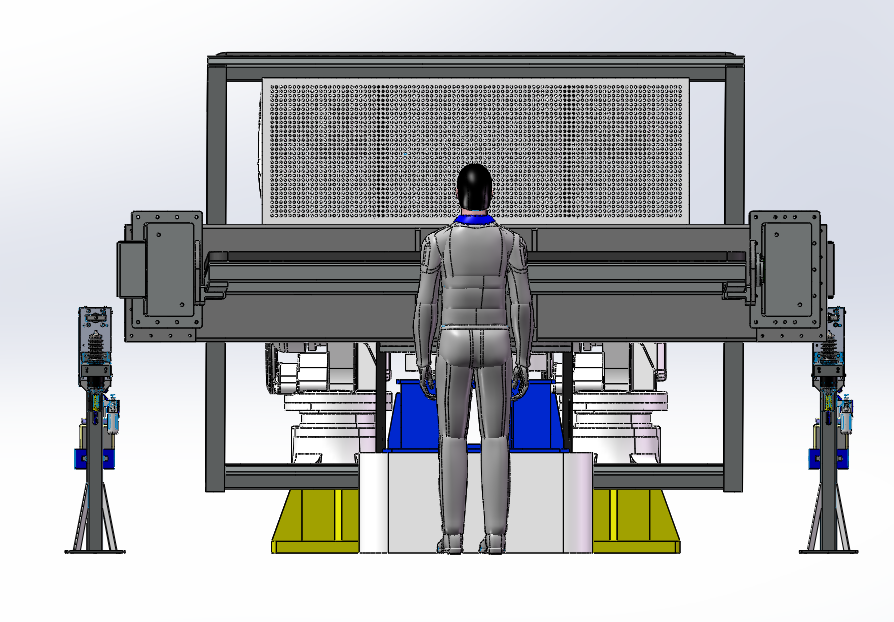
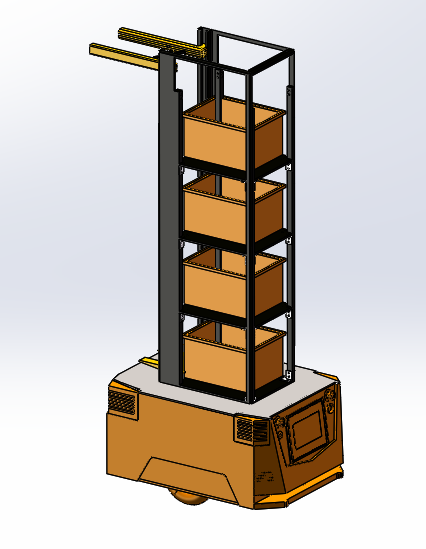
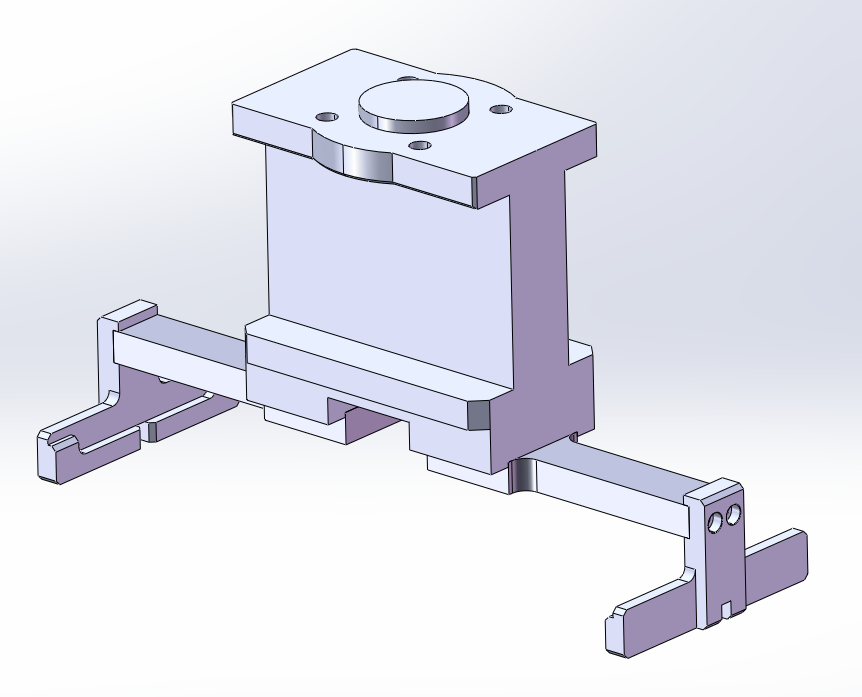
双机器人双工位变位机焊接(ID:1924759)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17420419622114.zip | 141.61M |
| 2 | 830.2100NEW.SLDPRT | 6.37M |
| 3 | 人体模型.SLDPRT | 15.37M |
| 4 | 总装配体.SLDASM | 41.46M |
| 5 | 架子-2.SLDPRT | 100.25K |
| 6 | 架子.SLDPRT | 101.61K |
| 7 | 4kg焊枪.SLDASM | 9.04M |
| 8 | 782.0214W60022°icatminiw夹丝780.3531145.0866小口喷嘴.SLDASM | 19.76M |
| 9 | RS50N.SLDASM | 8.05M |
| 10 | RS50NJT1^RS50N2_RS50N.SLDPRT | 780.49K |
| 11 | RS50NJT2^RS50N2_RS50N.SLDPRT | 1.92M |
| 12 | RS50NJT3^RS50N2_RS50N.SLDPRT | 1.18M |
| 13 | RS50NJT4^RS50N2_RS50N.SLDPRT | 1.06M |
| 14 | RS50NJT5^RS50N2_RS50N.SLDPRT | 1.48M |
| 15 | RS50NJT6^RS50N2_RS50N.SLDPRT | 882.05K |
| 16 | 吸盘.SLDPRT | 125.87K |
| 17 | 吸盘支架.SLDPRT | 78.50K |
| 18 | 摄像头.SLDPRT | 132.98K |
| 19 | 机器人底座.SLDPRT | 128.45K |
| 20 | 装配体11.SLDASM | 16.48M |
| 21 | 1000ˮƽ±äλ»ú.SLDASM | 47.31K |
| 22 | 1000ˮƽµ××ù.SLDPRT | 383.32K |
| 23 | 1000ˮƽ¹¤×°ÅÌ.SLDPRT | 80.81K |
| 24 | 160OÐÎȦ.SLDPRT | 18.45K |
| 25 | 1800¹¤×°¿ò_ĬÈÏ_°´¼Ó¹¤_.SLDPRT | 767.28K |
| 26 | 210-20β×ùÁ¬½Ó×ù.SLDPRT | 31.66K |
| 27 | 40-20Êä³öÁ¬½Ó×ù.SLDPRT | 28.70K |
| 28 | 40E-1000ˮƽ°²×°°å.SLDPRT | 32.17K |
| 29 | 40E°²×°·¨À¼.SLDPRT | 23.85K |
| 30 | 40eµç»ú°å.SLDPRT | 23.67K |
| 31 | 40eÁ¬½Ó×ù.SLDPRT | 33.36K |
| 32 | 40Í·×ù-6mm.SLDPRT | 240.67K |
| 33 | 40Í·×ù×°Åä.SLDASM | 3.37M |
| 34 | 602³ÝȦ.SLDPRT | 217.41K |
| 35 | 602»Øת֧³Ð.SLDASM | 34.20K |
| 36 | 602ÍâȦ.SLDPRT | 27.38K |
| 37 | AS1420-MetricM8x20.SLDPRT | 26.46K |
| 38 | GB825-88µõ»·Âݶ¤M16¡Á28.SLDPRT | 46.73K |
| 39 | GB¨uT70.1-2008[ÄÚÁù½ÇÔ²ÖùÍ·Âݶ¤M8¡Á35]_M8¡Á35.SLDPRT | 25.61K |
| 40 | HQ5M130-100D20A2ËÅ·þµç»úÍâÐÎͼ.SLDPRT | 3.26M |
| 41 | RV-40E-Ball.SLDPRT | 18.86K |
| 42 | RV-40E-Body.SLDPRT | 52.80K |
| 43 | RV-40E-Gear.SLDPRT | 19.61K |
| 44 | RV-EϵÁмõËÙ»ú[RV-40E]2.SLDASM | 50.31K |
| 45 | rv40e-121.SLDASM | 38.96K |
| 46 | UCFC210_UCFC210.SLDPRT | 65.75K |
| 47 | µç»úÕÖ2.SLDPRT | 311.47K |
| 48 | µõ»·Âݶ¤M16¡Á28.SLDPRT | 47.31K |
| 49 | ¶Ë×Ó°å.SLDPRT | 27.41K |
| 50 | ·À»¤¸Ü.SLDPRT | 66.83K |
| 51 | ¸ôÀë°å_ĬÈÏ_°´¼Ó¹¤_.SLDPRT | 721.16K |
| 52 | ºáÁº.SLDPRT | 526.70K |
| 53 | É¢ÈÈ.SLDPRT | 193.13K |
| 54 | Ë«Öᷴת¿òµ÷Õû×ù.SLDPRT | 29.33K |
| 55 | β×ù-6mm×°Åä.SLDASM | 531.61K |
| 56 | β×ù.SLDPRT | 261.49K |
| 57 | β×ù°å.SLDPRT | 23.79K |
| 58 | Ô²Öù³ÝÂÖ30¡Á5.SLDPRT | 113.36K |
| 59 | ×ùͨоÖá.SLDPRT | 28.34K |
| 60 | 变位机底座.SLDPRT | 74.72K |
| 61 | 旋转块.SLDASM | 232.41K |
| 62 | 水平三轴.SLDASM | 5.95M |
| 63 | 21f1a1fd80c8a9103702c60574bb7db.png | 108.93K |
| 64 | 2dcd5d5d56676f4c96f6ca3669151c9.png | 434.81K |
| 65 | 3acca942bd08d0f03654d50d4d3492d.png | 120.33K |
| 66 | 674cad7283c07d70ea58e07791997b2.png | 214.87K |
| 67 | 8980e9aef49a8edbe156d61f366d90b.png | 233.90K |
| 68 | a18cd9ed3f3e552947acb192f8da6a9.png | 246.18K |
| 69 | a4e4d4cc80ba5faf481e999c2f37b3a.png | 221.86K |
| 70 | dc635f64ce7acc3729f9868c71cb985.png | 263.70K |
| 71 | e4d91903b6375da0d69a50ba9b42c9c.png | 125.84K |
此图纸下载需要500金币
立即下载
发布者
仙人掌设计
创作: 332
粉丝: 20
加入时间:2022-11-04

模型信息
图纸格式:sldprt,sldasm
文件大小:145.01M
所需金币:500
上传时间:2025-03-15 20:33:17
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2022
标签
图纸简介
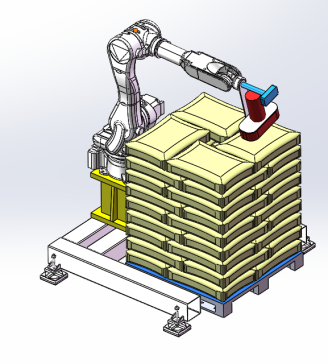
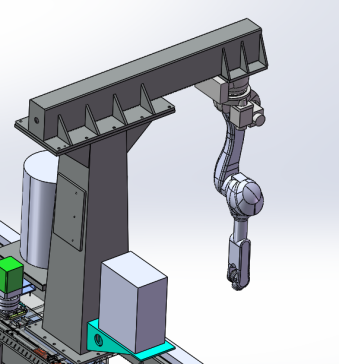
此模型是由SOLIDWORKS2022版建模而成。一种高效、高精度且具有高度柔性化的焊接自动化解决方案,利用双机器人与双工位变位机协同作业,适用于各类复杂形状、多焊缝的金属结构件焊接生产。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)

0.png)
0.png)
0.png)

