
登录注册
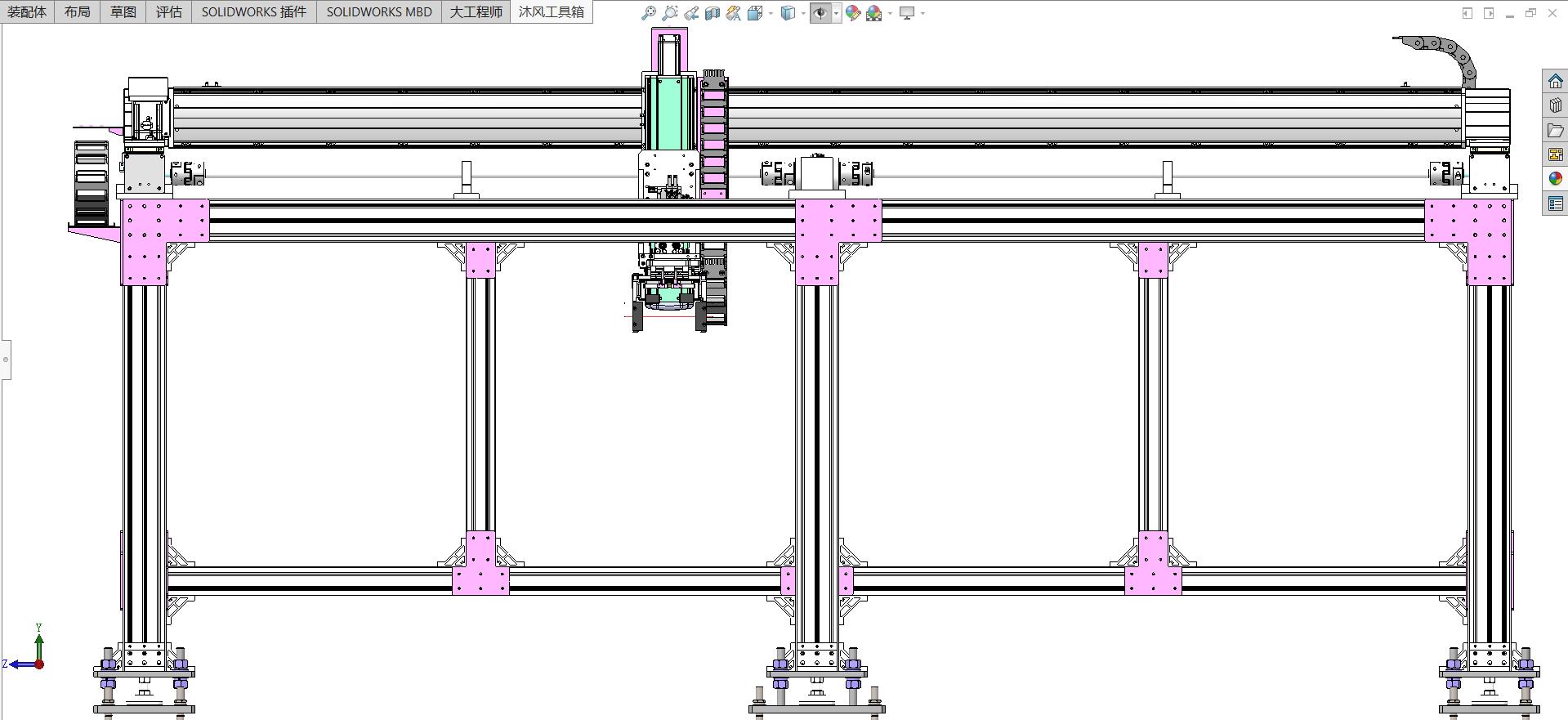
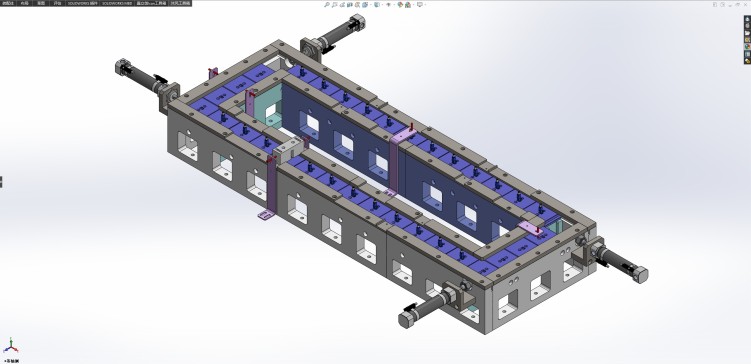
基于标准模组的龙门分选机械手(ID:1971021)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染


0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | ACA1007-101.sldprt | 30.67K |
| 2 | ACA1007-102.sldprt | 25.59K |
| 3 | AirTACL型螺纹直通PL6M5.sldprt | 239.14K |
| 4 | AirTACL型螺纹直通PL802.sldprt | 54.17K |
| 5 | AirTACT型三通PE6.sldprt | 50.83K |
| 6 | AirTAC先导阀PCV06.sldprt | 50.26K |
| 7 | AirTAC内螺纹直通PCF601.sldprt | 49.45K |
| 8 | AirTAC定位螺母F-ACA10LM.sldprt | 35.51K |
| 9 | AirTAC旋转气缸HRQ50ADMSH.sldasm | 36.26K |
| 10 | AirTAC气动手指HFD25X40DMSH.sldasm | 36.17K |
| 11 | AirTAC油压缓冲器ACA1007-1.sldasm | 33.27K |
| 12 | AirTAC消声器PALM02.sldprt | 56.60K |
| 13 | AirTAC电磁阀7V130C06B200.sldprt | 98.74K |
| 14 | AirTAC电磁阀7V130E06B200.sldprt | 98.72K |
| 15 | AirTAC电磁阀底座7V100M3F.sldprt | 88.17K |
| 16 | AirTAC电磁阀组件7V130EJ06B2007V130CJ06B200.sldasm | 41.97K |
| 17 | AirTAC盲板P-7V100M-R2.sldprt | 65.76K |
| 18 | AirTAC节流阀PTL601A.sldprt | 172.16K |
| 19 | AirTAC节流阀PTL6M5A-M.sldprt | 180.04K |
| 20 | AirTAC螺纹直通PC601.sldprt | 50.91K |
| 21 | HFD25X40DMSH01.sldprt | 156.76K |
| 22 | HFD25X40DMSH02.sldprt | 32.71K |
| 23 | HIWIN线性滑块MGN12H.sldprt | 173.32K |
| 24 | HIWIN线性滑轨MGN12H-L170.sldprt | 52.69K |
| 25 | HIWIN线性滑轨MGN12H-L65.sldprt | 46.99K |
| 26 | HRQ50ADMSH01.sldprt | 127.48K |
| 27 | HRQ50ADMSH02.sldprt | 25.73K |
| 28 | OMRON槽型开关EE-SX672-WR.sldprt | 299.45K |
| 29 | Panasonic光电开关EX-11AP.sldprt | 42.05K |
| 30 | Panasonic光电开关EX-13A.sldprt | 37.17K |
| 31 | Panasonic槽型开关PM-U25.sldprt | 48.53K |
| 32 | PI线性模组MKR110-U-L3700.SLDPRT | 17.45M |
| 33 | PI线性模组RMH14-BC-200WL400.SLDPRT | 4.20M |
| 34 | PI线性模组RMP17S-LU-750WL3300.SLDPRT | 8.93M |
| 35 | TZGC025-000基于标准模组的龙门分选机械手.SLDASM | 25.14M |
| 36 | TZGC025-000基于标准模组的龙门分选机械手.STEP | 226.19M |
| 37 | TZGC025-000基于标准模组的龙门分选机械手.x_t | 94.83M |
| 38 | TZGC025-100.sldasm | 4.27M |
| 39 | TZGC025-101.sldprt | 6.69M |
| 40 | TZGC025-102.sldprt | 76.88K |
| 41 | TZGC025-103.sldprt | 84.94K |
| 42 | TZGC025-104.sldprt | 74.42K |
| 43 | TZGC025-105.sldprt | 76.79K |
| 44 | TZGC025-106.sldprt | 119.22K |
| 45 | TZGC025-107.sldprt | 95.97K |
| 46 | TZGC025-108.sldprt | 85.73K |
| 47 | TZGC025-109.sldprt | 192.23K |
| 48 | TZGC025-200.sldasm | 17.50M |
| 49 | TZGC025-201.sldprt | 33.71K |
| 50 | TZGC025-202.sldprt | 32.37K |
| 51 | TZGC025-203.sldprt | 47.83K |
| 52 | TZGC025-204.sldprt | 175.29K |
| 53 | TZGC025-205.sldprt | 41.42K |
| 54 | TZGC025-206.sldprt | 221.87K |
| 55 | TZGC025-207.sldprt | 196.83K |
| 56 | TZGC025-208.sldprt | 185.26K |
| 57 | TZGC025-209.sldprt | 338.28K |
| 58 | TZGC025-210.sldprt | 94.08K |
| 59 | TZGC025-300.sldasm | 3.73M |
| 60 | TZGC025-301.sldprt | 134.77K |
| 61 | TZGC025-302.sldprt | 122.93K |
| 62 | TZGC025-303.sldprt | 78.86K |
| 63 | TZGC025-304.sldprt | 92.03K |
| 64 | TZGC025-305.sldprt | 76.95K |
| 65 | TZGC025-306.sldprt | 70.22K |
| 66 | TZGC025-307.sldprt | 113.09K |
| 67 | TZGC025-308.sldprt | 106.91K |
| 68 | TZGC025-309.sldprt | 154.54K |
| 69 | TZGC025-310.sldprt | 156.60K |
| 70 | TZGC025-311.sldprt | 188.58K |
| 71 | TZGC025-312.sldprt | 40.97K |
| 72 | TZGC025-313.sldprt | 38.97K |
| 73 | TZGC025-314.sldprt | 967.80K |
| 74 | TZGC025-315.sldprt | 31.13K |
| 75 | TZGC025-316.sldprt | 29.98K |
| 76 | TZGC025-317.sldprt | 72.84K |
| 77 | TZGC025-318.sldprt | 79.52K |
| 78 | TZGC025-319.sldprt | 35.10K |
| 79 | TZGC025-320.sldprt | 76.81K |
| 80 | TZGC025-321.sldprt | 36.34K |
| 81 | TZGC025-322.sldprt | 72.13K |
| 82 | TZGC025-323.sldprt | 77.10K |
| 83 | TZGC025-324.sldprt | 30.21K |
| 84 | 市购六角螺母M24.sldprt | 38.41K |
| 85 | 市购定位销D5×L12.sldprt | 27.69K |
| 86 | 市购定位销D6×L16.sldprt | 27.06K |
| 87 | 市购平垫圈24.sldprt | 27.51K |
| 88 | 市购弹性垫圈24.sldprt | 28.26K |
| 89 | 市购膨胀螺栓M20×130.sldprt | 55.66K |
| 90 | 怡合达内六角堵头WHU03-02.sldprt | 33.03K |
| 91 | 怡合达压缩弹簧YVUM-D6-L20.sldprt | 35.68K |
| 92 | 怡合达拖链VBF03-F57-R55-N13-VEF03-F57.SLDPRT | 1.47M |
| 93 | 怡合达拖链VBF03-F77-R100-N54-VEF03-F77.SLDPRT | 3.84M |
| 94 | 怡合达拖链VBF03-F77-R100-N56-VEF03-F77.SLDPRT | 3.85M |
| 95 | 怡合达挤压角座ABC01-G408-80B-110.sldprt | 50.75K |
| 96 | 怡合达脚杯BZS01-10020100.sldprt | 40.70K |
此图纸下载需要60金币
立即下载
发布者
幻现时空
创作: 450
粉丝: 18
加入时间:2024-12-15

模型信息
图纸ID:1971021
图纸格式:sldprt,sldasm,step,x_t
文件大小:179.8M
所需金币:60
上传时间:2025-03-30 11:22:06
是否可编辑:可修改,不包括参数
软件版本:SOLIDWORKS 2018
标签
龙门机械手
分选机械手
图纸简介
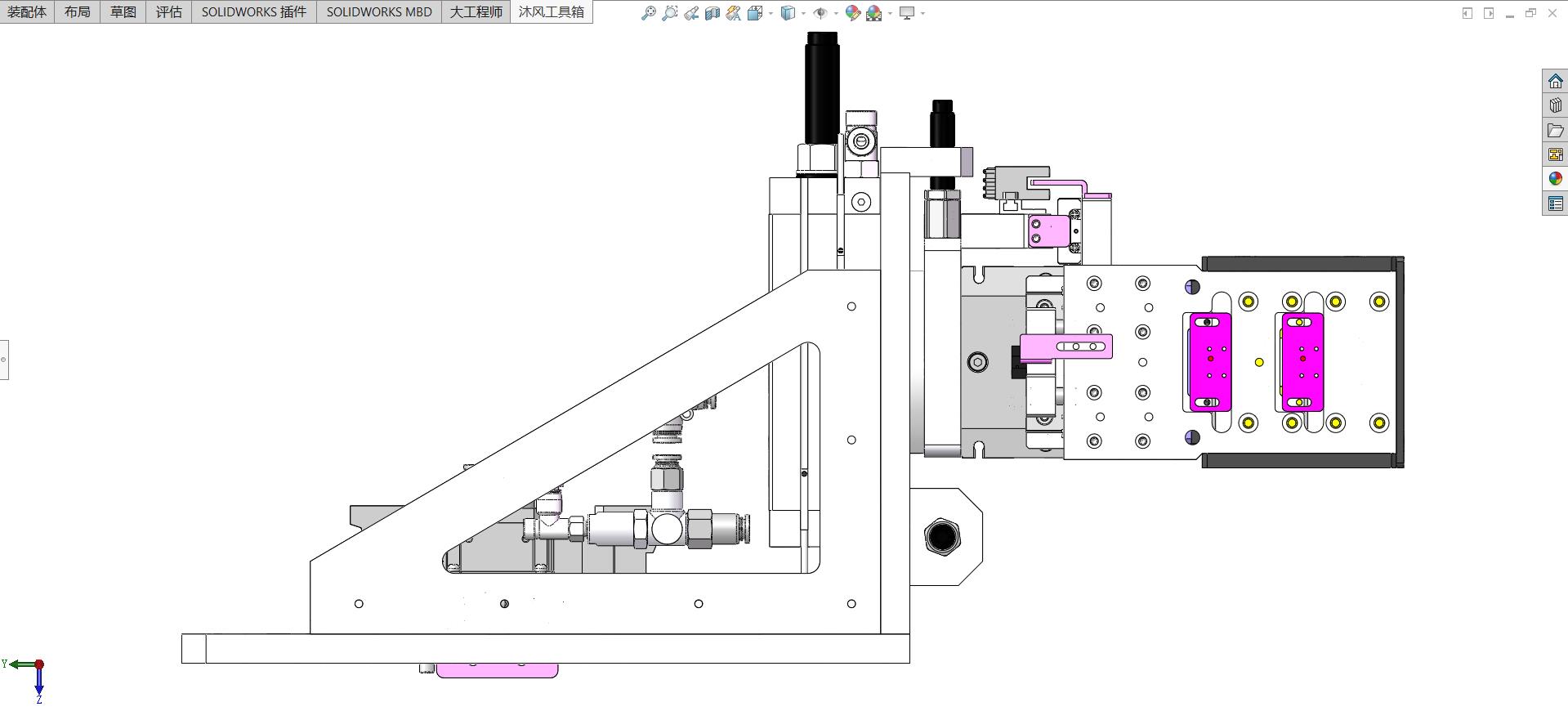
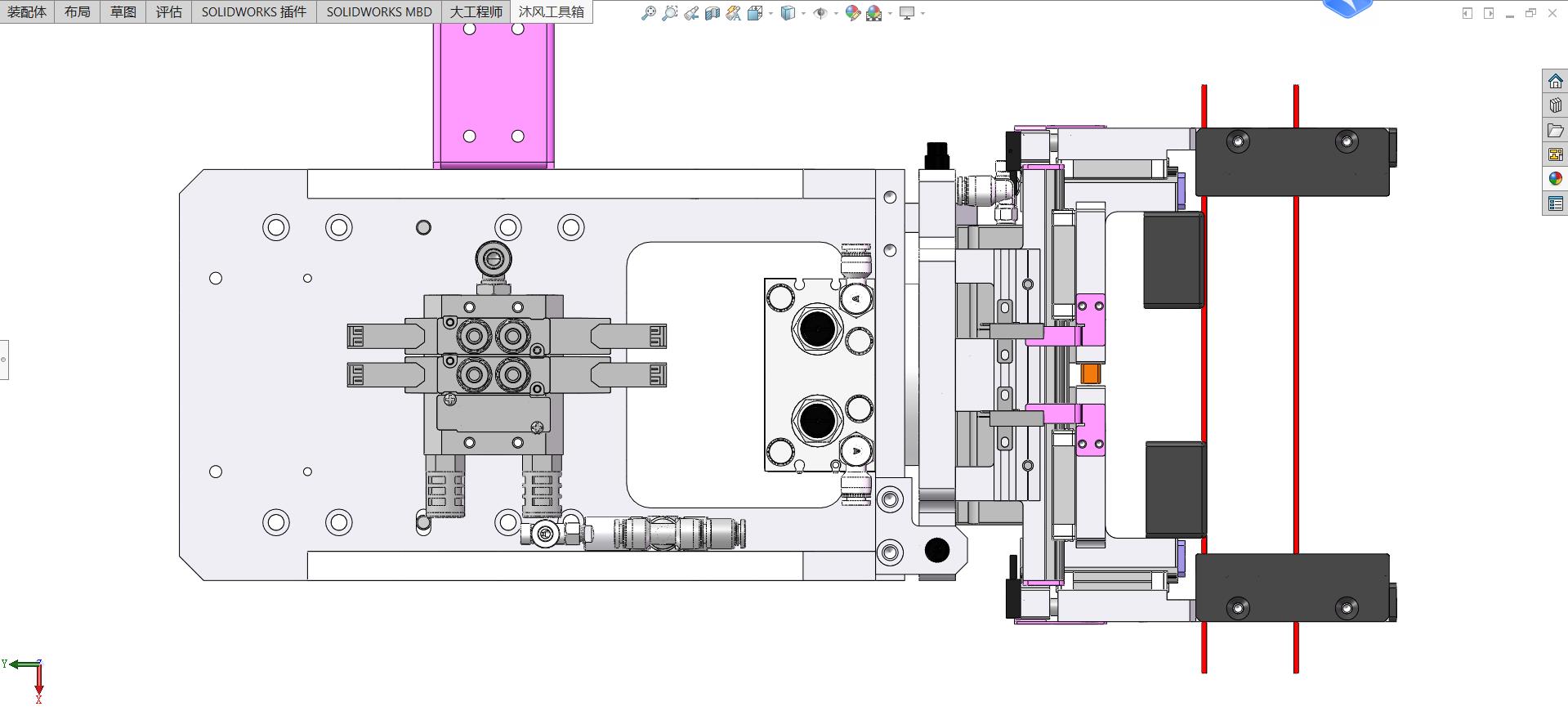
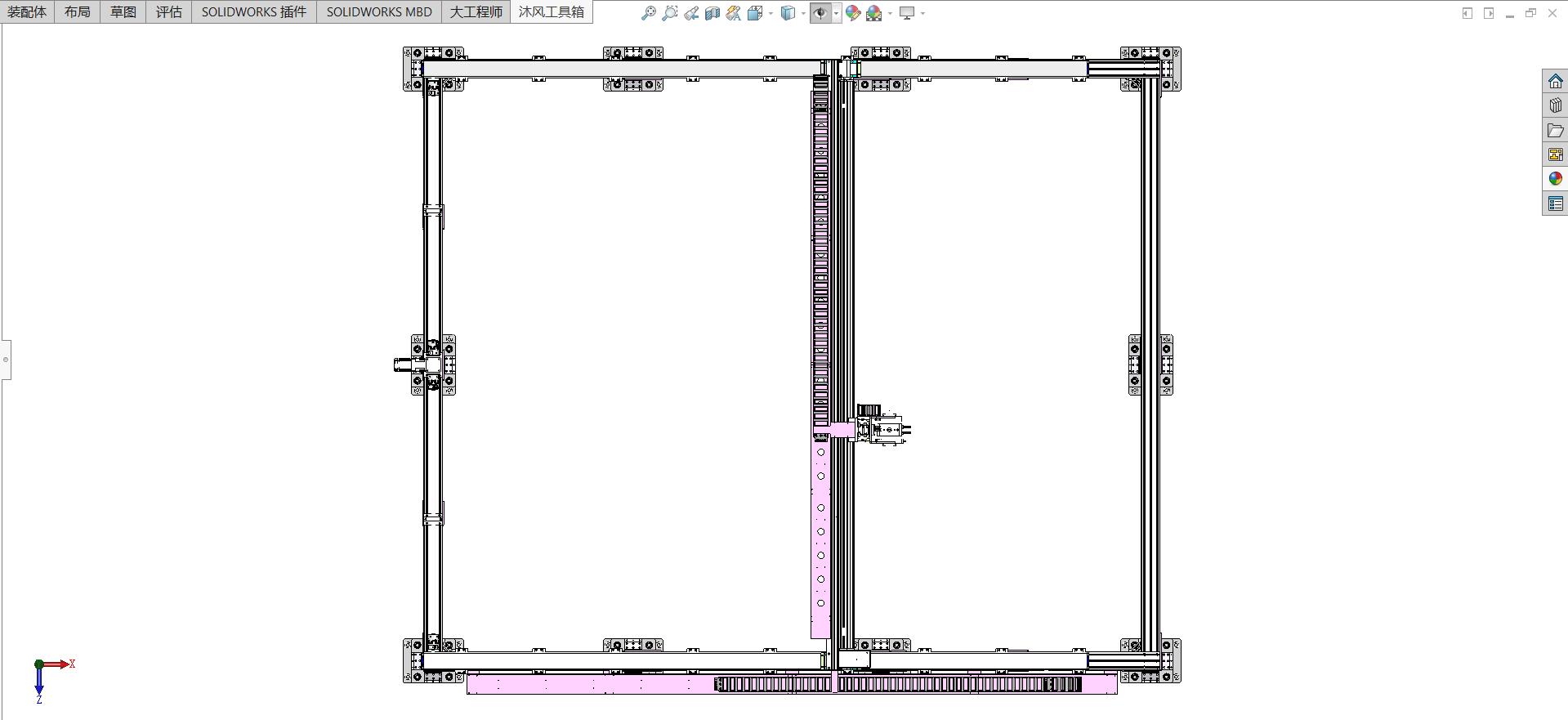
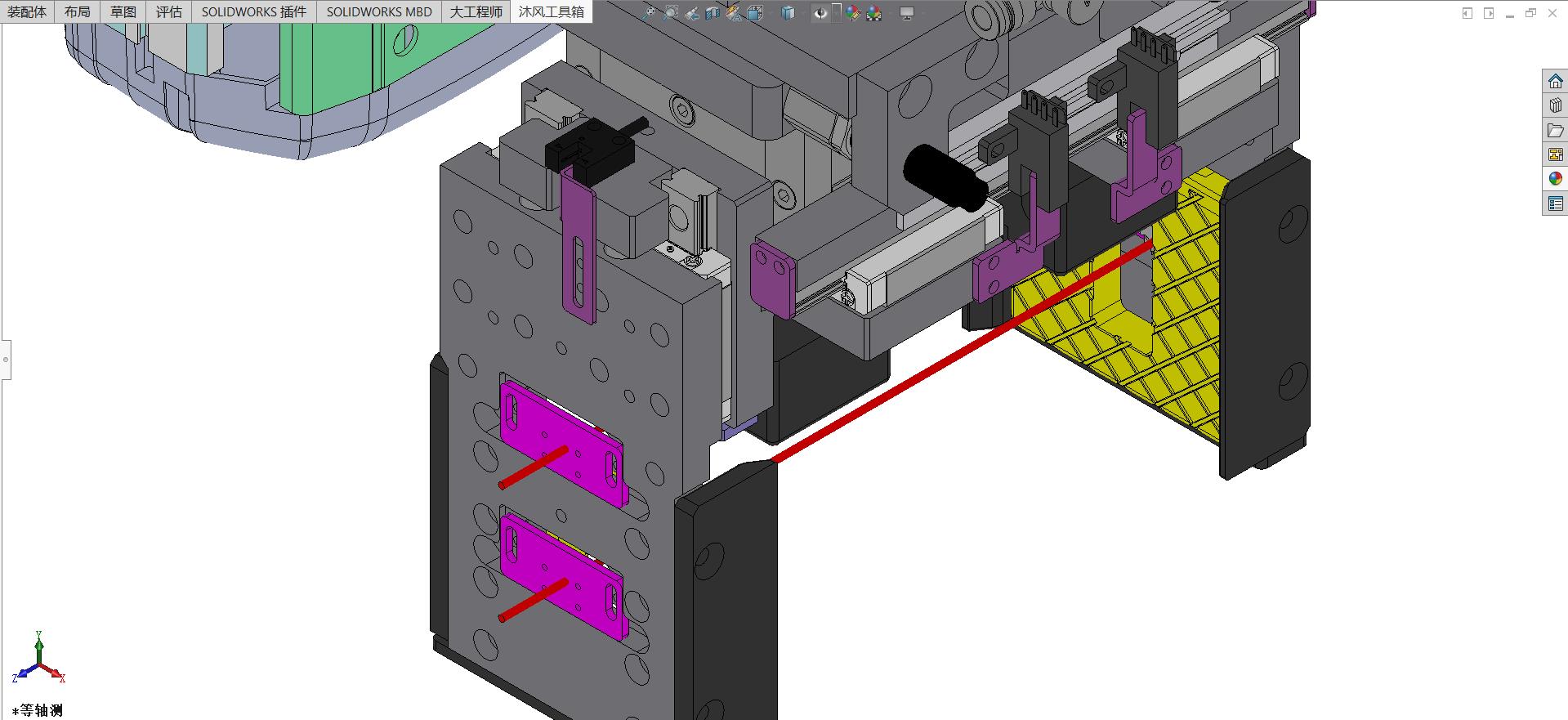
龙门分选机械手通过工业控制器(如PLC、运动控制器等)实现对各种输入信号(如传感器、按钮等)的分析处理,并据此对输出元件(如继电器、电机驱动器、指示灯等)下达执行命令,完成三轴之间的联合运动,从而实现一整套的全自动作业流程。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

