登录注册
自主式水下航行器(AUV)(ID:2146686)

0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17477489038007.zip | 7.98M |
| 2 | hazne_herhang.prt.1 | 79.04K |
| 3 | kelep_x2_00e7_x0_e_herhang.prt.1 | 83.31K |
| 4 | kenar_herhang.prt.1 | 101.60K |
| 5 | none-12714.prt.1 | 623.50K |
| 6 | none-13634.prt.1 | 389.49K |
| 7 | none-13988.prt.1 | 387.75K |
| 8 | none-14189.prt.1 | 352.45K |
| 9 | none-47718.prt.1 | 1.02M |
| 10 | none-47888.prt.1 | 306.93K |
| 11 | none-48462.prt.1 | 357.49K |
| 12 | none-48838.prt.1 | 518.04K |
| 13 | none-50505.prt.1 | 296.50K |
| 14 | none-51398.prt.1 | 388.46K |
| 15 | none-85143.prt.1 | 355.62K |
| 16 | none-85327.prt.1 | 296.16K |
| 17 | none-87691.prt.1 | 354.44K |
| 18 | none-88265.prt.1 | 391.95K |
| 19 | orta_herhang.prt.1 | 150.33K |
| 20 | rover.asm.1 | 75.92K |
| 21 | Rover.STEP | 11.99M |
| 22 | rover_herhang.asm.1 | 95.85K |
| 23 | t200-asm-cw-thruster-r1_herhang.asm.1 | 81.32K |
| 24 | tepe_herhang.prt.1 | 102.89K |
| 25 | _x2_00c7_x0_er_x2_00e7_x0_eve_h.prt.1 | 117.06K |
| 26 | 侧上图.png | 207.47K |
| 27 | 侧面图.png | 156.98K |
| 28 | 俯视图.png | 114.33K |
| 29 | 免责声明.txt | 2.84K |
| 30 | 斜上图.png | 181.05K |
| 31 | 正面图.png | 175.19K |
| 32 | 背面图.png | 167.59K |
| 33 | 自主式水下航行器(AUV).txt | 574B |
此图纸下载需要100金币
立即下载
发布者
机械_大攻城狮
创作: 166
粉丝: 5
加入时间:2025-03-29

模型信息
图纸格式:prt,asm,step
文件大小:8.17M
所需金币:100
上传时间:2025-05-20 21:48:25
是否可编辑:可修改,包括参数
版本:PROE*CREO 6.0
标签
图纸简介
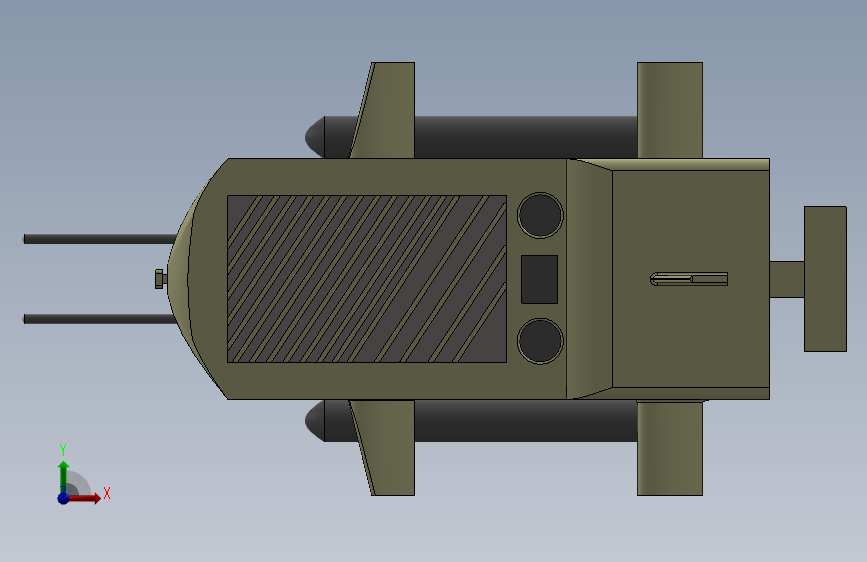
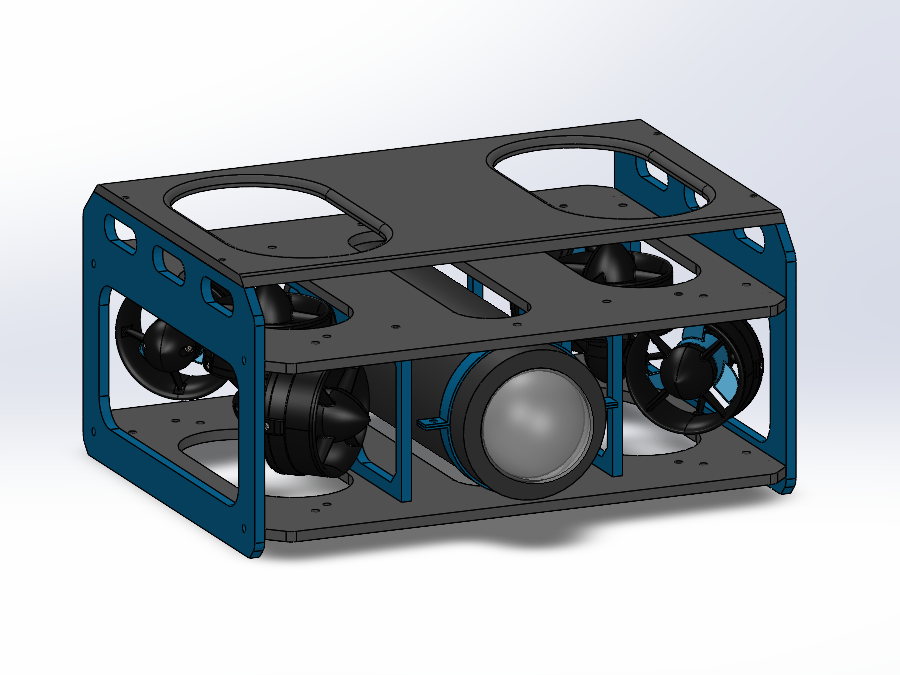
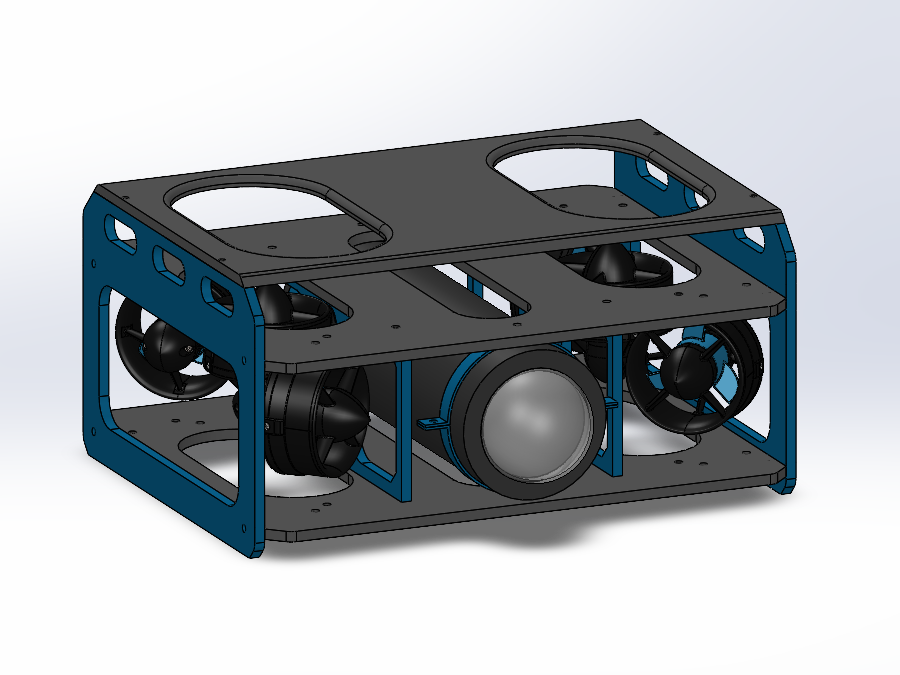
自主式水下航行器是无人潜航器的一种,它是一种综合利用人工智能等先进技术的水下平台,不仅有思想,而且活动范围更大,行动更加隐蔽。
自主式水下航行器(Autonomous Underwater Vehicle,简称AUV)是一个复杂的智能化机电系统,是能够在复杂的海洋环境中自主执行各种任务的无人平台。自主式水下航行器可视为载荷和运载体组成的一个多体系统,在载荷释放时必须保证分离后载荷不能与运载体发生碰撞
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。


猜你喜欢
0.png)

0.png)

0_0_364.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0_0_364.png)
0.png)
0.png)