
登录注册
UG 可移动机械手小车(ID:2349170)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17515101417882.rar | 73.79M |
| 2 | 1.prt | 81.00K |
| 3 | 1111.prt | 111.11K |
| 4 | 2.prt | 711.14K |
| 5 | 4.prt | 80.47K |
| 6 | 400W60-MSL01330.prt | 65.89K |
| 7 | 400W60-MSL01330.stp.prt | 66.36K |
| 8 | 60-MSL01330-0.stp.prt | 86.11K |
| 9 | 60-MSL01330-1.stp.prt | 165.35K |
| 10 | 60-MSL01330-2.stp.prt | 119.46K |
| 11 | 60-MSL01330.stp.prt | 182.41K |
| 12 | 6WD-U型减震支架.prt | 310.52K |
| 13 | 6WD-U型支架.prt | 286.05K |
| 14 | 6WD-下底盘.prt | 1.43M |
| 15 | 6WD电机支架.prt | 503.70K |
| 16 | 80-MSL024302.39Nm、3.18Nm)-0.stp.prt | 86.35K |
| 17 | 80-MSL024302.39Nm、3.18Nm)-1.stp.prt | 170.48K |
| 18 | 80-MSL024302.39Nm、3.18Nm).prt | 66.17K |
| 19 | 80-MSL024302.39Nm、3.18Nm).stp.prt | 66.88K |
| 20 | 80-MSL024302.39Nm、3.18Nm).stp206897.prt | 167.39K |
| 21 | AGV小车.prt | 92.12K |
| 22 | AGV小车.stp | 798.71K |
| 23 | AGV小车.stp.log | 9.15K |
| 24 | AGV小车11_step.prt | 56.44K |
| 25 | AGV小车4.21改_step.prt | 68.01K |
| 26 | AGV小车84133.prt | 69.78K |
| 27 | AGV小车底架_step.prt | 78.50K |
| 28 | AGV小车底盘_step.prt | 73.99K |
| 29 | crossrecessedctskheadscrewstypebgb_GB_CROSS_SCREWS_TYPE136M3X5-S.prt | 493.58K |
| 30 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M2.5X14-14Htype-S.prt | 1.49M |
| 31 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M2.5X16-16Htype-S.prt | 1.68M |
| 32 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M3X10-10Htype-S.prt | 1.03M |
| 33 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M3X16-16Htype-N.prt | 199.51K |
| 34 | D57CM31.prt | 184.68K |
| 35 | DHSG-20-XX-U-R14.prt | 934.46K |
| 36 | DHSG-25-XX-U-R14.prt | 922.55K |
| 37 | DHSG-32-XX-U-R19.prt | 1.25M |
| 38 | KB060_X2_7CBE5BC6884C661F51CF901F673A_X0_[KB060-L1-3]_KB_060-L1-3.prt | 282.68K |
| 39 | KB060_X2_7CBE5BC6884C661F51CF901F673A_X0_[KB060-L1-3]_KB_060-L1-3110260.prt | 281.88K |
| 40 | KB060_X2_7CBE5BC6884C661F51CF901F673A_X0_[KB060-L1-3]_KB_060-L1-3183713.prt | 281.87K |
| 41 | KB060_X2_7CBE5BC6884C661F51CF901F673A_X0_[KB060-L1-3]_KB_060-L1-356676.prt | 282.73K |
| 42 | KB060_X2_7CBE5BC6884C661F51CF901F673A_X0_[KB060-L1-3]_KB_060-L1-364026.prt | 465.05K |
| 43 | KB060精密行星减速机[KB060-L1-3]_KB060-L1-3.prt | 277.18K |
| 44 | M2.5防松螺母.prt | 502.96K |
| 45 | M3防松螺母.prt | 507.69K |
| 46 | motor1.prt | 117.83K |
| 47 | motor2.prt | 234.68K |
| 48 | motor3.prt | 137.67K |
| 49 | motor4.prt | 137.81K |
| 50 | motor5.prt | 520.57K |
| 51 | MSA25A2SS.prt | 168.77K |
| 52 | MSA25ESSFCN.prt | 1.47M |
| 53 | QMA-15-Left.prt | 3.56M |
| 54 | QMA-15-Right.prt | 3.55M |
| 55 | _X2_5C0F8F665E9576D8_X0_.prt | 187.51K |
| 56 | 一节臂.prt | 108.32K |
| 57 | 三轴.prt | 71.05K |
| 58 | 三轴法兰.prt | 180.95K |
| 59 | 三轴盖.prt | 181.04K |
| 60 | 三轴连接套.prt | 78.47K |
| 61 | 丝杆.prt | 909.58K |
| 62 | 二节臂.prt | 122.29K |
| 63 | 二轴.prt | 71.37K |
| 64 | 二轴法兰.prt | 172.66K |
| 65 | 二轴盖.prt | 181.47K |
| 66 | 二轴连接套.prt | 78.42K |
| 67 | 信号接插件座.stp.prt | 257.67K |
| 68 | 减震上球头.prt | 149.78K |
| 69 | 减震上球头固定.prt | 498.44K |
| 70 | 减震下球头.prt | 147.74K |
| 71 | 减震下球头固定.prt | 459.11K |
| 72 | 包胶轮.prt | 219.61K |
| 73 | 同步轮A.prt | 270.38K |
| 74 | 同步轮B.prt | 206.08K |
| 75 | 四轴.prt | 71.01K |
| 76 | 四轴法兰.prt | 163.21K |
| 77 | 四轴盖.prt | 187.90K |
| 78 | 四轴连接套.prt | 78.63K |
| 79 | 小车底盘.prt | 278.47K |
| 80 | 小车整体装配.prt | 127.55K |
| 81 | 小车整体装配4.18.prt | 186.43K |
| 82 | 小车整体装配4.21.prt | 186.79K |
| 83 | 底板A.prt | 114.82K |
| 84 | 底架.prt | 258.19K |
| 85 | 底架1.prt | 225.84K |
| 86 | 底盘1_step.prt | 66.21K |
| 87 | 底盘4.21_step.prt | 66.07K |
| 88 | 底盘4.21改_step.prt | 72.78K |
| 89 | 底盘_step.prt | 56.39K |
| 90 | 弹簧.prt | 333.71K |
| 91 | 新1.prt | 113.71K |
| 92 | 新2.prt | 132.85K |
| 93 | 新3.prt | 114.74K |
| 94 | 新4.prt | 179.60K |
| 95 | 机械手2-AGV小车.log | 118.82K |
| 96 | 机械手2-AGV小车.STEP | 35.04M |
| 97 | 机械手2-AGV小车4.17改图.stp | 26.93M |
| 98 | 机械手2-AGV小车4.17改图.stp.log | 46.90K |
| 99 | 机械手2-AGV小车_1__step.prt | 110.24K |
| 100 | 机械手2-AGV小车_step.prt | 127.96K |
| 101 | 机械手钣金总装.prt | 70.38K |
| 102 | 法兰轴承.prt | 243.20K |
| 103 | 滑板.prt | 178.61K |
| 104 | 电机安装板.prt | 101.55K |
| 105 | 电源接插件座.stp.prt | 273.74K |
| 106 | 电箱背门.prt | 166.71K |
| 107 | 电箱门.prt | 172.31K |
| 108 | 电路板.prt | 123.39K |
| 109 | 立柱.prt | 117.35K |
| 110 | 联轴器.prt | 146.23K |
| 111 | 船型开关.prt | 322.24K |
| 112 | 轴承座A.prt | 80.28K |
| 113 | 钣金B.prt | 241.34K |
| 114 | 钣金C.prt | 166.53K |
| 115 | 顶部盖板A.prt | 130.72K |
| 116 | 顶部盖板B.prt | 103.88K |
| 117 | 麦克纳姆轮-97mmL.prt | 2.92M |
| 118 | 麦克纳姆轮-97mmR.prt | 1.57M |
| 119 | 麦轮T.zip | 13.37M |
| 120 | 麦轮减震底盘GA25-97.IGS | 19.41M |
| 121 | 麦轮减震底盘GA25-97.log | 15B |
| 122 | 麦轮减震底盘GA25-97.rpt | 3.09K |
| 123 | 麦轮减震底盘GA25-97q.prt | 6.62M |
| 124 | 麦轮减震底盘GA25-97q188697.prt | 6.62M |
| 125 | 麦轮减震底盘GA25-97q31959.prt | 6.62M |
| 126 | 麦轮减震底盘GA25-97q75293.prt | 6.62M |
| 127 | 麦轮减震底盘GA25-97q90555.prt | 6.13M |
| 128 | 麦轮减震底盘GA25-97_igs.prt | 206.04K |
| 129 | 2.prt | 711.14K |
| 130 | 4.prt | 80.47K |
| 131 | 6WD-U型减震支架.prt | 310.52K |
| 132 | 6WD-U型支架.prt | 286.05K |
| 133 | 6WD-下底盘.prt | 1.43M |
| 134 | 6WD电机支架.prt | 503.70K |
| 135 | crossrecessedctskheadscrewstypebgb_GB_CROSS_SCREWS_TYPE136M3X5-S.prt | 493.58K |
| 136 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M2.5X14-14Htype-S.prt | 1.49M |
| 137 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M2.5X16-16Htype-S.prt | 1.68M |
| 138 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M3X10-10Htype-S.prt | 1.03M |
| 139 | crossrecessedpanheadscrewsgb_GB_CROSS_SCREWS_TYPE1M3X16-16Htype-N.prt | 199.51K |
| 140 | M2.5防松螺母.prt | 502.96K |
| 141 | M3防松螺母.prt | 507.69K |
| 142 | motor1.prt | 117.83K |
| 143 | motor2.prt | 234.68K |
| 144 | motor3.prt | 137.67K |
| 145 | motor4.prt | 137.81K |
| 146 | motor5.prt | 520.57K |
| 147 | 减震上球头.prt | 149.78K |
| 148 | 减震上球头固定.prt | 498.44K |
| 149 | 减震下球头.prt | 147.74K |
| 150 | 减震下球头固定.prt | 459.11K |
| 151 | 包胶轮.prt | 219.61K |
| 152 | 弹簧.prt | 333.71K |
| 153 | 新1.prt | 113.71K |
| 154 | 新2.prt | 132.85K |
| 155 | 新3.prt | 114.74K |
| 156 | 新4.prt | 179.60K |
| 157 | 法兰轴承.prt | 243.20K |
| 158 | 联轴器.prt | 146.23K |
| 159 | 船型开关.prt | 322.24K |
| 160 | 麦克纳姆轮-97mmL.prt | 2.92M |
| 161 | 麦克纳姆轮-97mmR.prt | 1.57M |
| 162 | 麦轮减震底盘GA25-97.IGS | 19.41M |
| 163 | 麦轮减震底盘GA25-97.log | 15B |
| 164 | 麦轮减震底盘GA25-97_igs.prt | 206.04K |
此图纸下载需要73金币
立即下载
发布者
一品三维工程师
创作: 314
粉丝: 4
加入时间:2024-05-03

模型信息
图纸格式:prt,stp,step,igs
文件大小:75.56M
所需金币:73
上传时间:2025-07-03 10:35:55
是否可编辑:可修改,不包括参数
版本:STEP
标签
UG建模
机械手
图纸简介
模型明细
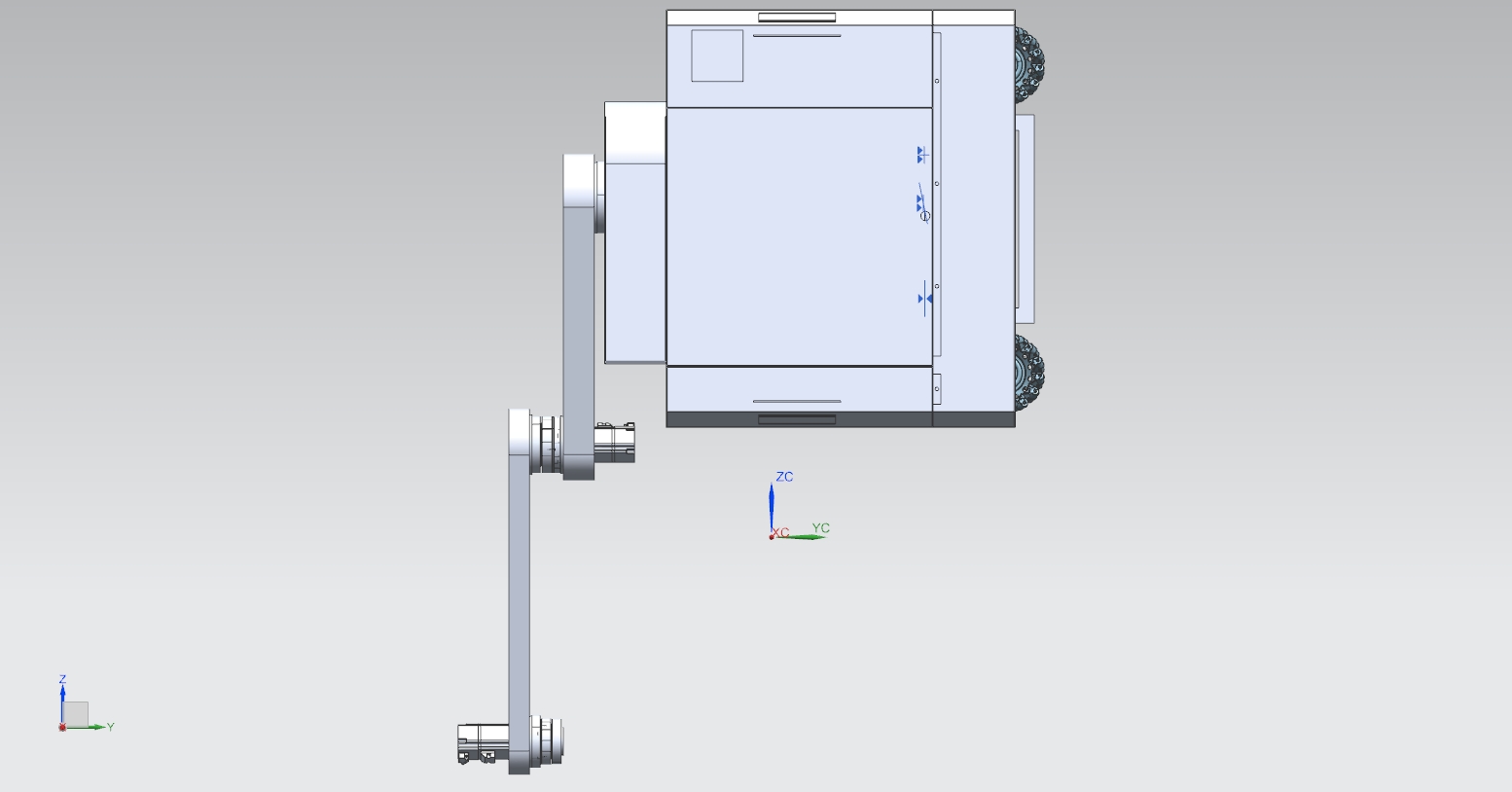
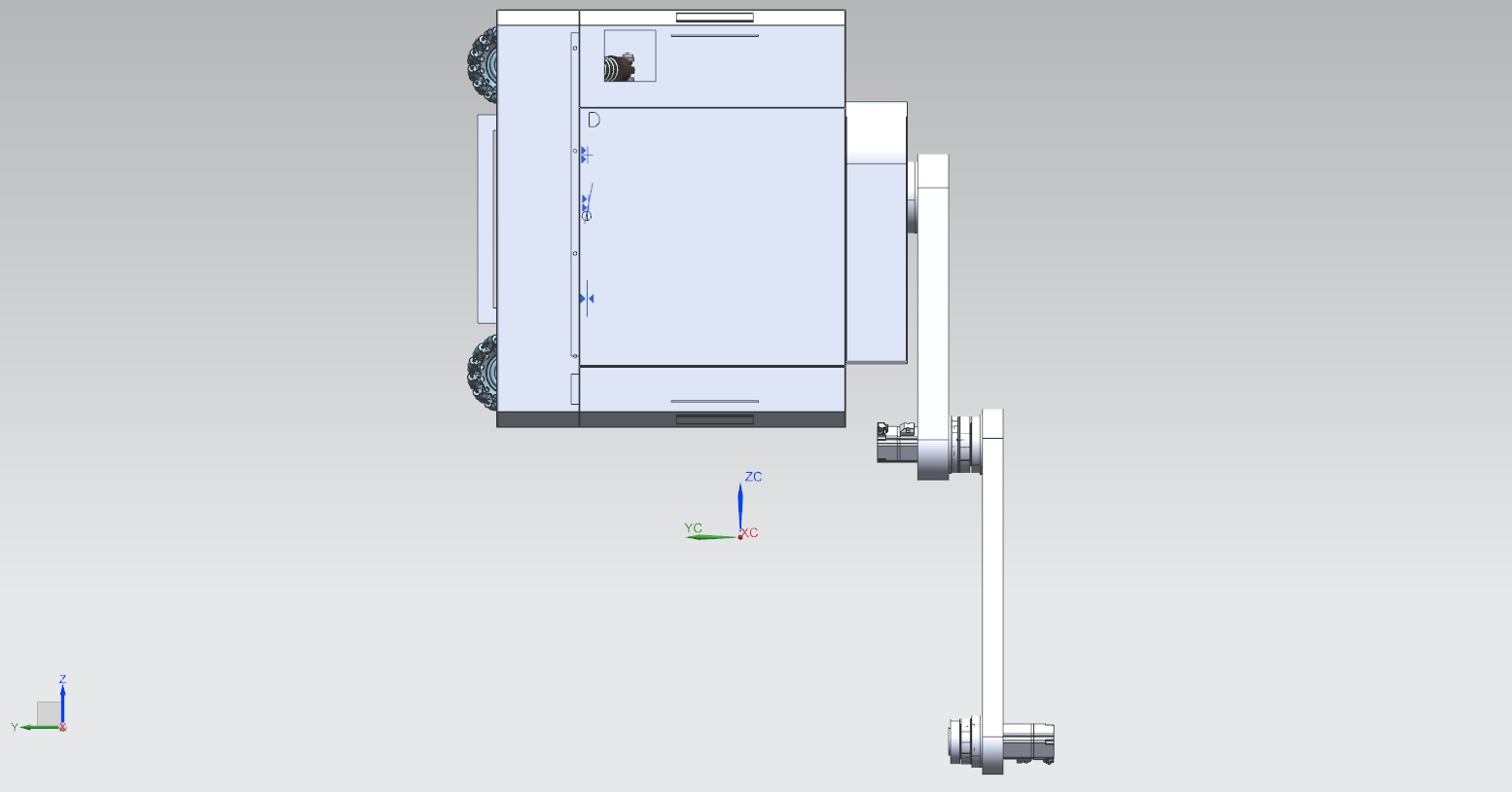
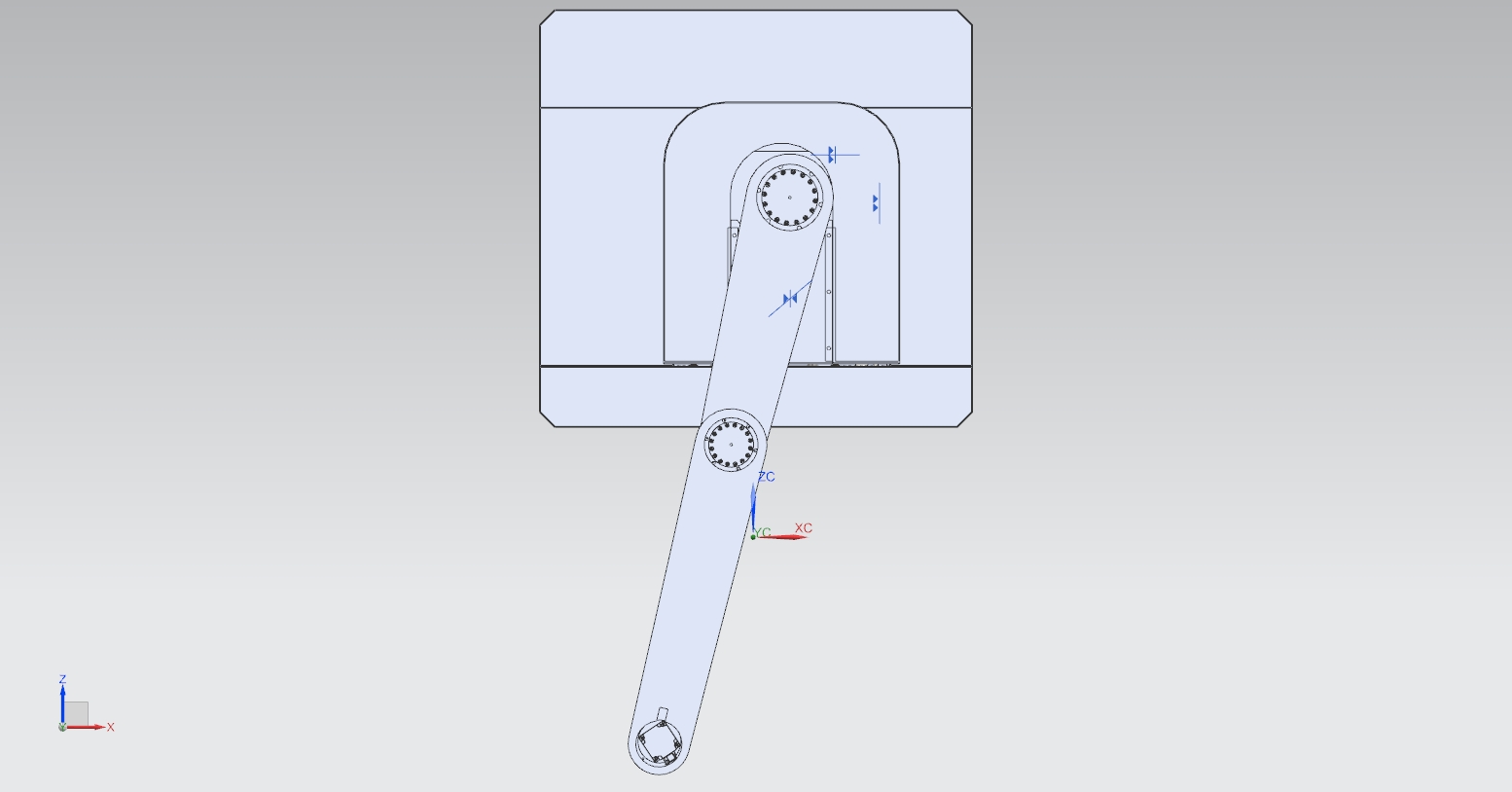
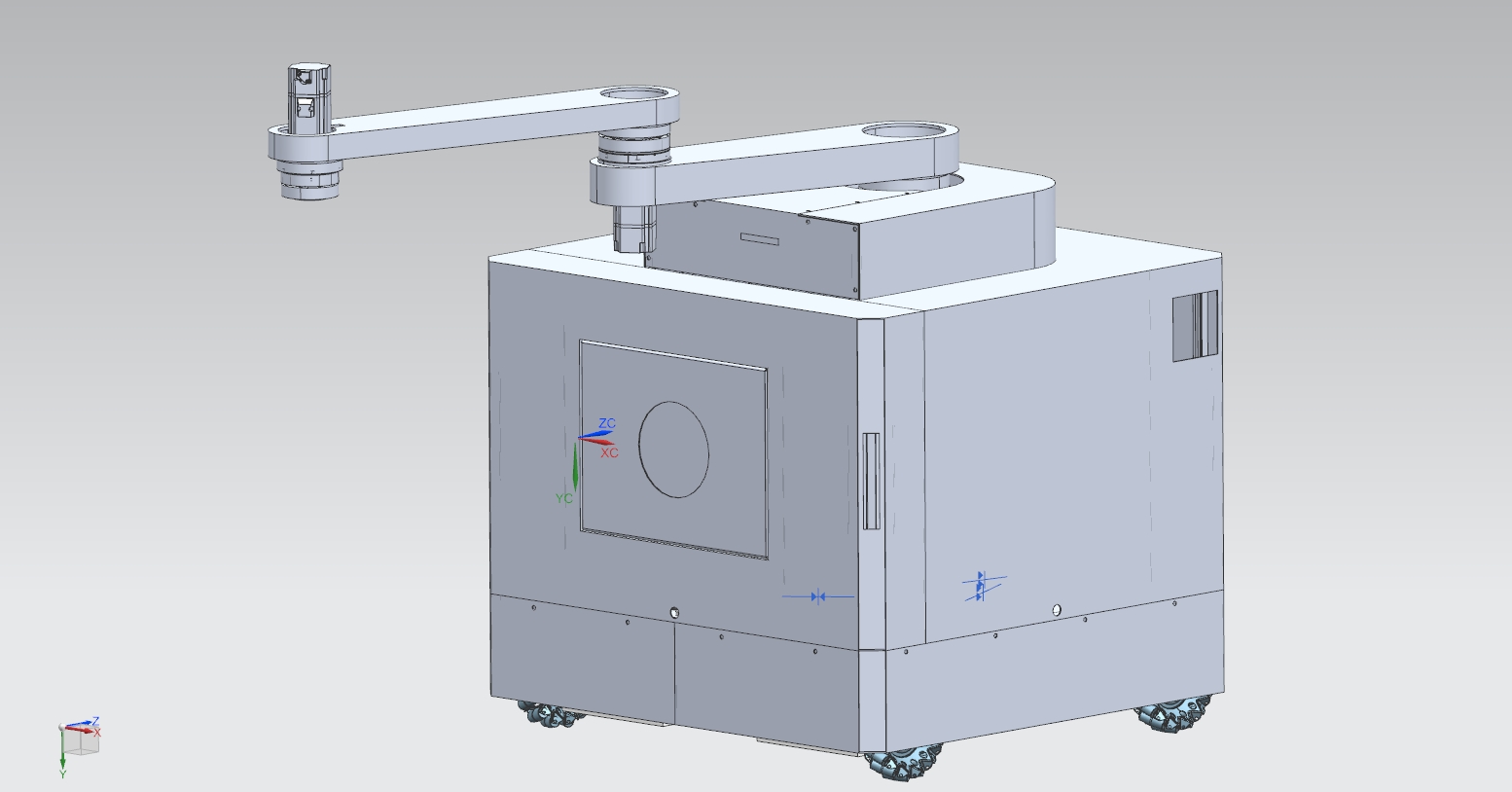
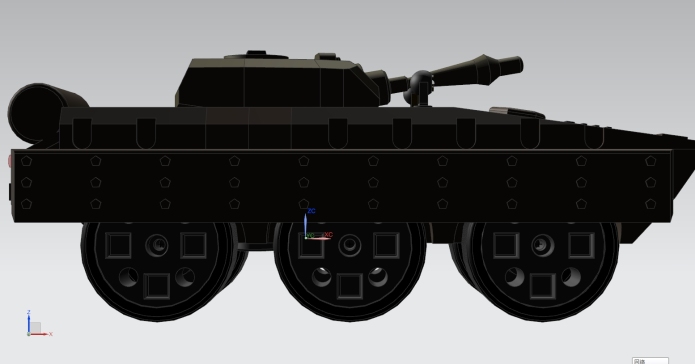
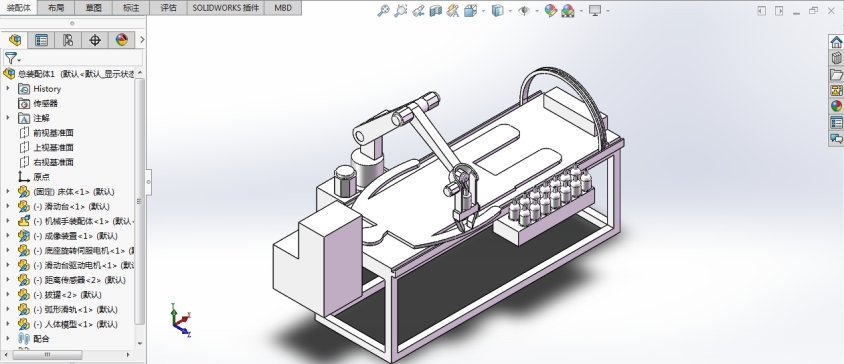
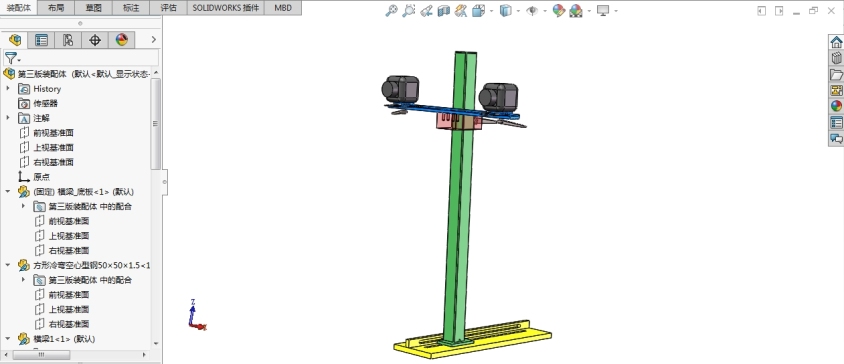
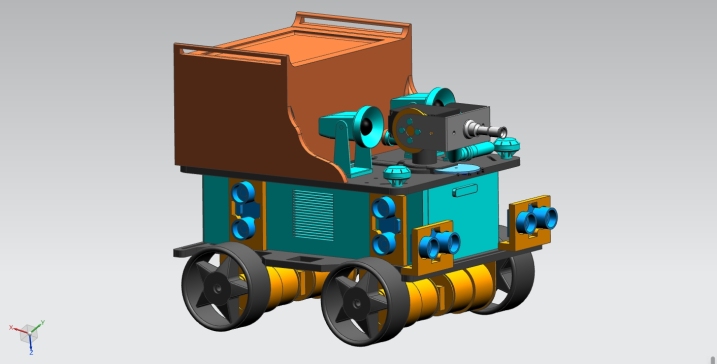
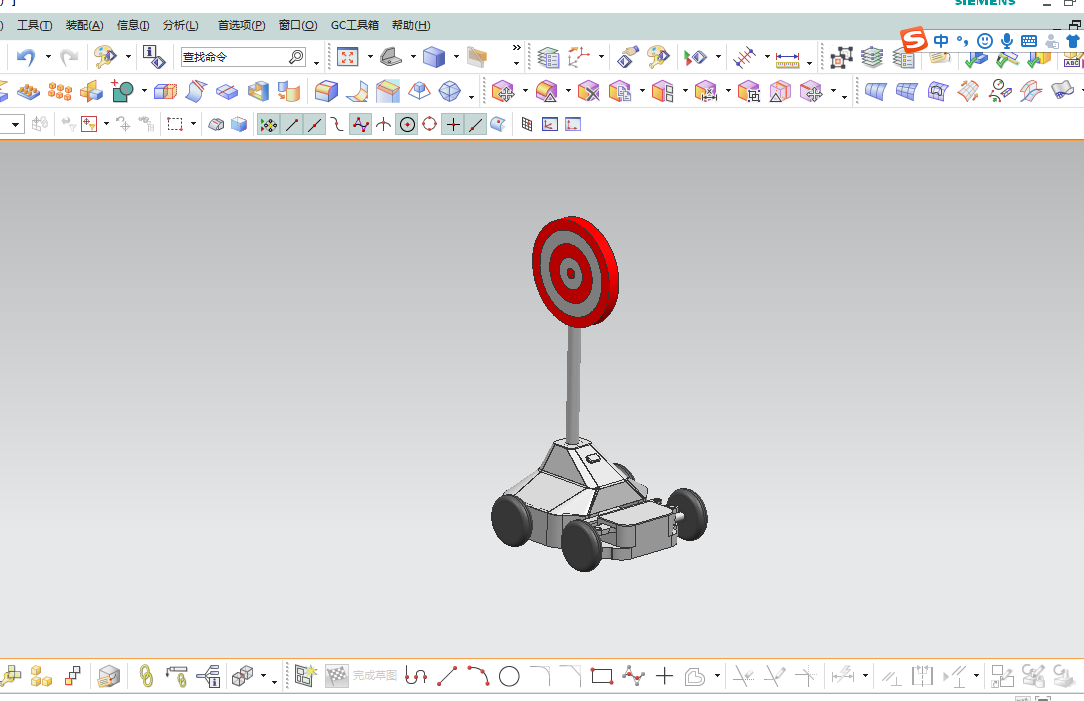
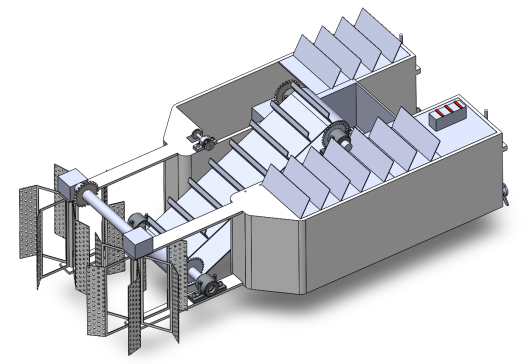
可移动机械手模型由移动底盘、多关节机械臂、末端执行器及控制系统模块组成。
技术要求
移动底盘定位精度达 ±10mm,适应复杂地面环境。
机械臂重复定位精度 ±0.5mm,关节最大旋转角度误差≤1°。
设计原理
控制系统接收指令后,驱动底盘移动至目标区域,机械臂通过关节联动调整姿态,末端执行器根据物体特性切换抓取模式,完成夹取、搬运等动作,传感器实时反馈位置信息以修正误差。
用途
适用于工厂车间物料搬运、仓储货物分拣、实验室样品传递等场景,尤其在狭窄空间或重复性作业中可替代人工,提升工作效率与安全性。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。


0.png)
0.jpg)
0.jpg)
0.jpg)
0.png)
0.jpg)
0.png)
0.jpg)
0_0_364.png)
0.png)
0.png)
0_0_364.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)

