
登录注册
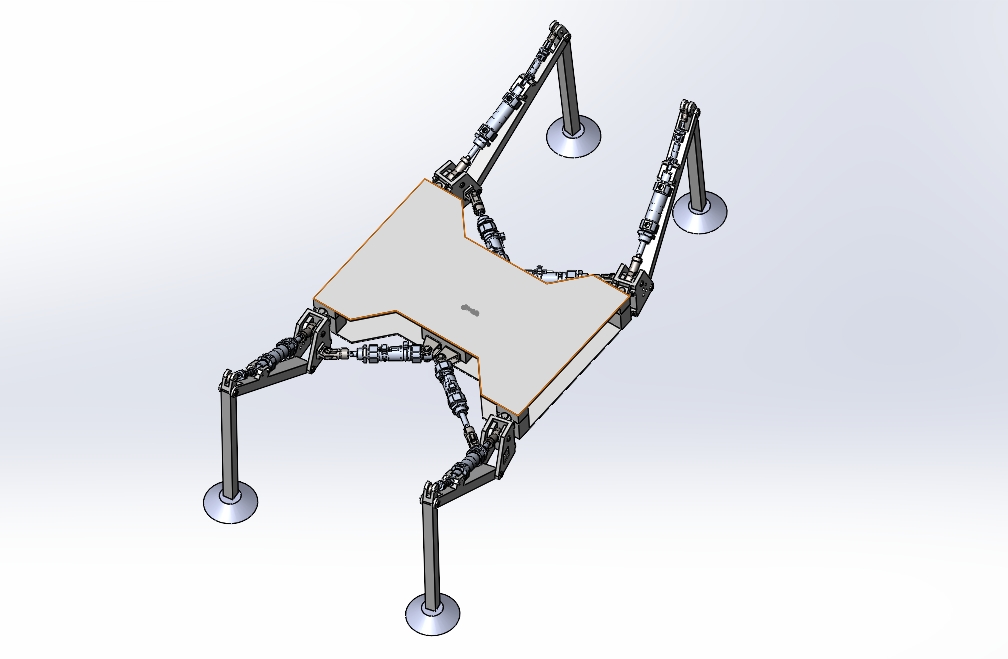
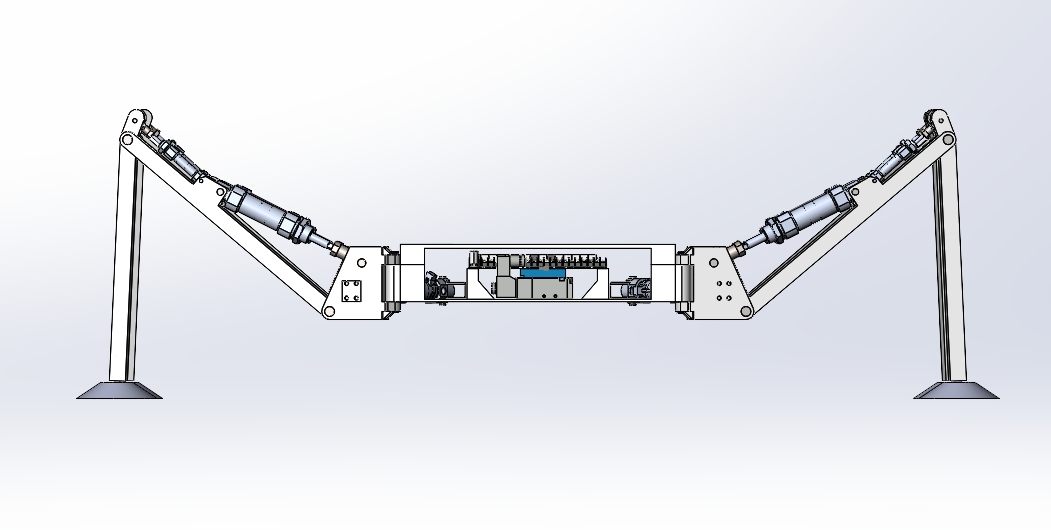
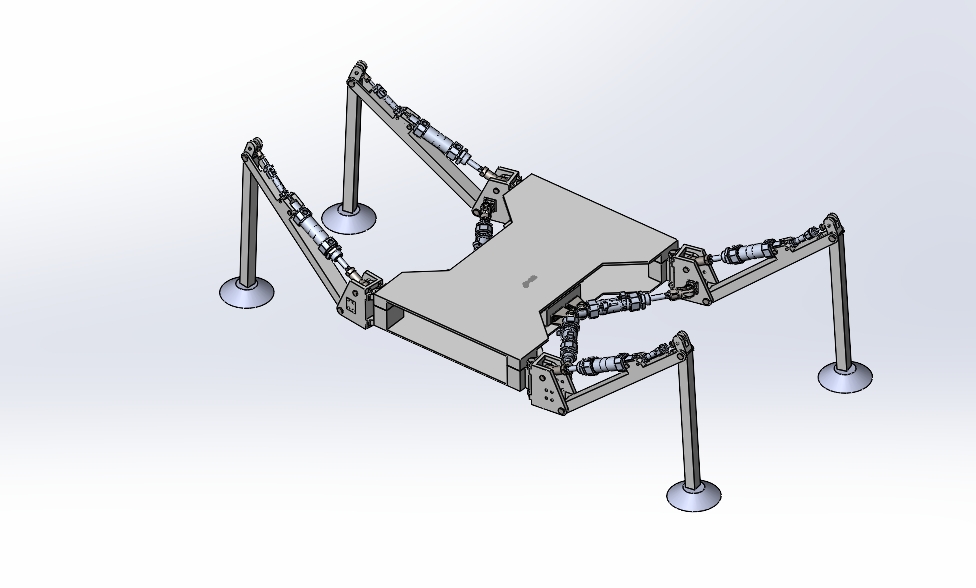
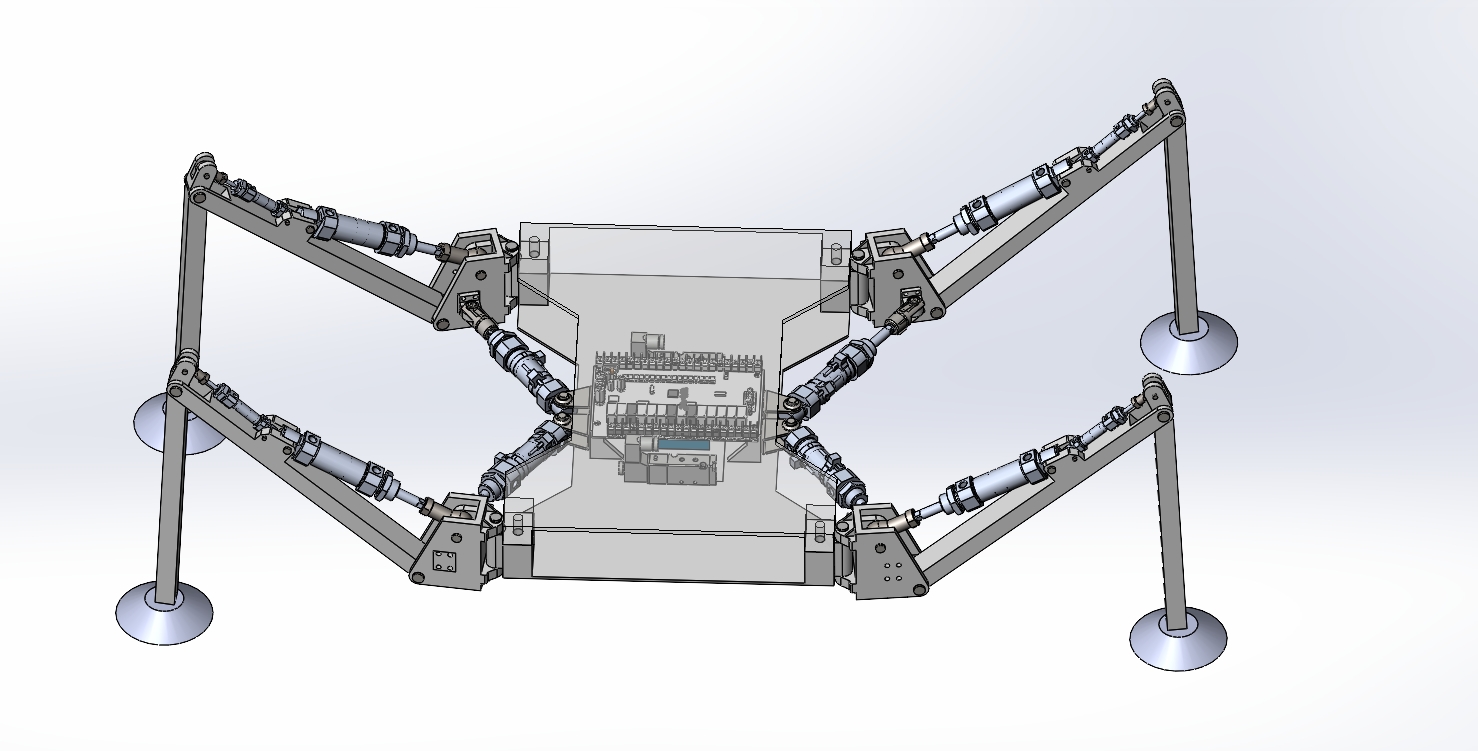
仿生四足机器人(ID:2380111)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17521634241336.rar | 62.67M |
| 2 | 4V110-M5-ValveBody.sldprt | 68.99K |
| 3 | 4V110M5B.sldasm | 101.62K |
| 4 | 4V130CM5B.sldasm | 113.92K |
| 5 | CS1-M-S25-.sldprt | 48.27K |
| 6 | F-MF25Y.sldprt | 383.91K |
| 7 | F-MI20SDB25.sldprt | 110.13K |
| 8 | MI10-M12x1.25-Nut.sldprt | 38.91K |
| 9 | MI10x10-CA_c.sldprt | 52.23K |
| 10 | MI10x10CA0.sldasm | 172.76K |
| 11 | MI10x10_r.sldprt | 28.23K |
| 12 | MI25-M22x1.5-Nut.sldprt | 39.04K |
| 13 | MI25x25-CA_c.sldprt | 53.14K |
| 14 | MI25x25CA0.sldasm | 185.89K |
| 15 | MI25x25_r.sldprt | 39.04K |
| 16 | MI25x30-CA_c.sldprt | 52.01K |
| 17 | MI25x30SCA0DMSG-2.sldasm | 224.66K |
| 18 | MI25x30_r.sldprt | 38.92K |
| 19 | PLC工控板_30MR.SLDPRT | 7.46M |
| 20 | 仿生四足机器人.SLDASM | 2.98M |
| 21 | 仿生四足机器人.x_t | 17.95M |
| 22 | 单足-静应力分析1.CWR | 29.24M |
| 23 | 单足.SLDASM | 381.68K |
| 24 | 大腿.SLDPRT | 125.70K |
| 25 | 小腿2.SLDPRT | 85.49K |
| 26 | 底盘1-静应力分析1.CWR | 20.52M |
| 27 | 底盘1.SLDPRT | 276.95K |
| 28 | 微信截图_20250710145223.png | 117.13K |
| 29 | 微信截图_20250710145235.png | 123.25K |
| 30 | 微信截图_20250710145257.png | 110.36K |
| 31 | 微信截图_20250710145307.png | 259.79K |
| 32 | 摆动件-静应力分析1.CWR | 14.19M |
| 33 | 摆动件.SLDPRT | 304.77K |
| 34 | 摆动件连接件-静应力分析1.CWR | 9.36M |
| 35 | 摆动件连接件.SLDPRT | 92.60K |
| 36 | 电池.SLDPRT | 76.68K |
| 37 | 盖板2.SLDPRT | 111.07K |
| 38 | 足端.SLDPRT | 74.05K |
| 39 | 足端万向杆.SLDPRT | 88.50K |
| 40 | 销轴10X50.SLDPRT | 98.13K |
| 41 | 销轴12X35.SLDPRT | 86.26K |
| 42 | 销轴12X50.SLDPRT | 96.78K |
| 43 | 销轴12X75.SLDPRT | 76.10K |
| 44 | 销轴4X35.SLDPRT | 74.26K |
| 45 | 销轴5X25.SLDPRT | 95.35K |
| 46 | 销轴8X35.SLDPRT | 84.62K |
| 47 | 鱼眼接头M10X125U.SLDPRT | 233.73K |
| 48 | 鱼眼接头M4X070U.SLDPRT | 210.79K |
此图纸下载需要200金币
立即下载
发布者
香蕉石头
创作: 254
粉丝: 1
加入时间:2024-07-28
模型信息
图纸格式:sldprt,sldasm,x_t
文件大小:64.17M
所需金币:200
上传时间:2025-07-11 00:06:56
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2019
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0.png)

