
登录注册
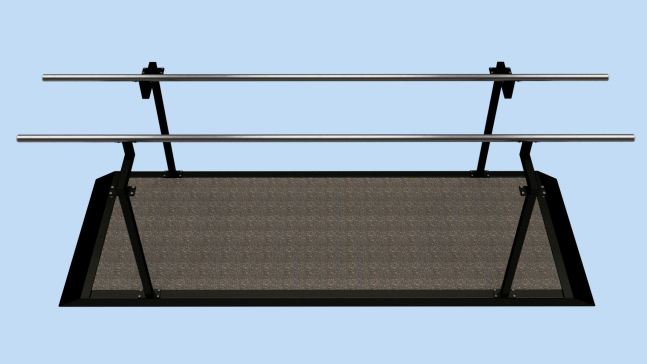
轮足复合步行机器人(ID:24036)
0.jpg)
3.jpg)
4.jpg)
2.jpg)
1.jpg)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 整体装配图.exb | 241.50K |
| 2 | 大腿上部.exb | 162.50K |
| 3 | 大腿下部.exb | 167.50K |
| 4 | 身体框架.exb | 228.00K |
| 5 | 毕业设计轴.exb | 103.50K |
| 6 | 端盖.exb | 98.50K |
| 7 | 轴二号.exb | 103.00K |
| 8 | zuizhong chengpin.avi | 23.95M |
| 9 | zuizhong chengpin.bak | 636.50K |
| 10 | 仿真车身.SLDPRT | 151.50K |
| 11 | 仿真车身2.SLDPRT | 155.00K |
| 12 | 假的.SLDPRT | 126.00K |
| 13 | 关节部分1.SLDPRT | 225.50K |
| 14 | 动画仿真模拟.avi | 3.18M |
| 15 | 大腿上部.bak | 162.50K |
| 16 | 大腿下部.bak | 167.50K |
| 17 | 大腿二次修订1.SLDPRT | 210.00K |
| 18 | 小腿二次修订1.SLDPRT | 225.50K |
| 19 | 整体装配图.bak | 241.50K |
| 20 | 毕业设计轴.bak | 103.50K |
| 21 | 端盖.bak | 98.50K |
| 22 | 装配体1.avi | 1.76M |
| 23 | 装配体1.SLDASM | 183.00K |
| 24 | 试验品.avi | 836.00K |
| 25 | 试验品.SLDASM | 1.27M |
| 26 | 试验品依次起身大腿.avi | 836.00K |
| 27 | 试验品依次起身小腿.avi | 1.00M |
| 28 | 试验品依次起身岔开起身.avi | 420.50K |
| 29 | 试验品小腿依次起身.avi | 1.07M |
| 30 | 试验品平起不考虑底面摩擦.avi | 905.50K |
| 31 | 身体框架.bak | 228.00K |
| 32 | 轴二号.bak | 103.00K |
| 33 | 零件1.SLDPRT | 146.50K |
| 34 | 零件2.SLDPRT | 159.00K |
| 35 | 零件3.SLDPRT | 153.50K |
| 36 | 零件4.SLDPRT | 144.00K |
| 37 | 零件5.SLDPRT | 119.00K |
免费下载
发布者
眼睛大的猫咪
创作: 160330
粉丝: 1207
加入时间:2022-08-18

模型信息
图纸格式:sldprt,sldasm
文件大小:16.76M
所需金币:0
上传时间:2020-10-12 03:10:27
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2014
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)

