
登录注册
仿生机械手模型(ID:257816)
3.png)
2.png)
0.png)
1.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | Arm cover.SLDPRT | 238.89K |
| 2 | Connection Long test.SLDPRT | 58.86K |
| 3 | Connection Short.SLDPRT | 60.34K |
| 4 | DC Motor as part.SLDPRT | 1.77M |
| 5 | Finger Assembly 3.SLDASM | 393.35K |
| 6 | Finger segment 1 TESTING FR.SLDPRT | 401.99K |
| 7 | Finger segment 2 TESTING FR.SLDPRT | 392.79K |
| 8 | Finger tip.SLDPRT | 321.95K |
| 9 | flat head screw_am.sldprt | 210.25K |
| 10 | gear5.SLDPRT | 490.55K |
| 11 | gear_sub1.SLDASM | 125.79K |
| 12 | gear_sub2.SLDASM | 101.89K |
| 13 | gear_sub3.SLDASM | 83.71K |
| 14 | HAND BASE PROTO VER 2.SLDPRT | 1.74M |
| 15 | hex nut style 2_am.sldprt | 234.61K |
| 16 | hs-422_sws.SLDPRT | 638.18K |
| 17 | Index Rod.SLDPRT | 63.98K |
| 18 | middle cover.SLDPRT | 151.16K |
| 19 | part 1.SLDPRT | 277.42K |
| 20 | part 3 bottom.SLDPRT | 187.45K |
| 21 | Part1.SLDPRT | 71.25K |
| 22 | Part2.SLDPRT | 75.16K |
| 23 | Part5.SLDPRT | 1.05M |
| 24 | Part6.SLDPRT | 251.54K |
| 25 | Part7-2.SLDPRT | 266.18K |
| 26 | pcb.SLDPRT | 189.08K |
| 27 | Pinkie Rod.SLDPRT | 66.65K |
| 28 | pls help.SLDPRT | 57.55K |
| 29 | prevailing torque hex nut_am.sldprt | 240.23K |
| 30 | PROTO ASSEMBLY FINAL.SLDASM | 6.05M |
| 31 | radial ball bearing_68_am.sldprt | 514.43K |
| 32 | Ring Rod.SLDPRT | 66.21K |
| 33 | Rotor scaled.SLDPRT | 9.30M |
| 34 | SERVO.SLDASM | 4.71M |
| 35 | shaft.SLDPRT | 207.91K |
| 36 | spur gear_am.sldprt | 291.12K |
| 37 | spur gear_iso.sldprt | 494.53K |
| 38 | Step Motor 28BYJ-48.SLDPRT | 333.93K |
| 39 | TOP COVER PROTO VER2.SLDPRT | 1.39M |
| 40 | Wrist bone long.SLDPRT | 137.27K |
| 41 | Wrist bone short.SLDPRT | 78.06K |
| 42 | 仿生机械手模型.SLDASM | 6.04M |
| 43 | 仿生机械手模型.STEP | 37.97M |
此图纸下载需要30金币
立即下载
发布者
每逢大事有静气
创作: 30490
粉丝: 455
加入时间:2022-08-18

模型信息
图纸格式:sldprt,sldasm,step
文件大小:50.08M
所需金币:30
上传时间:2022-05-08 18:16:12
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2018
标签
仿生机械手
图纸简介
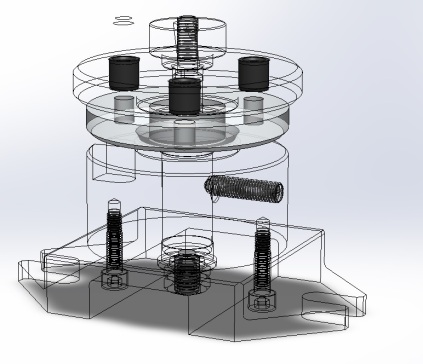
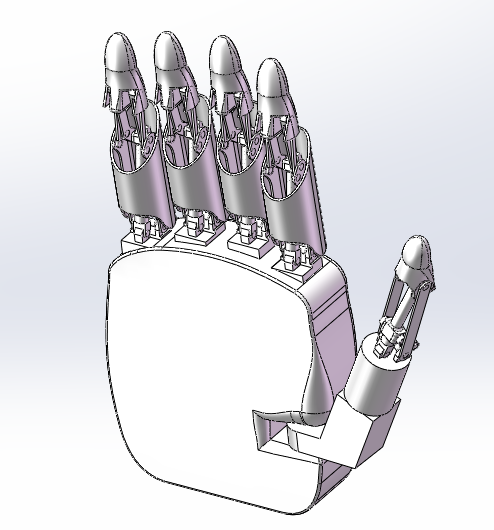
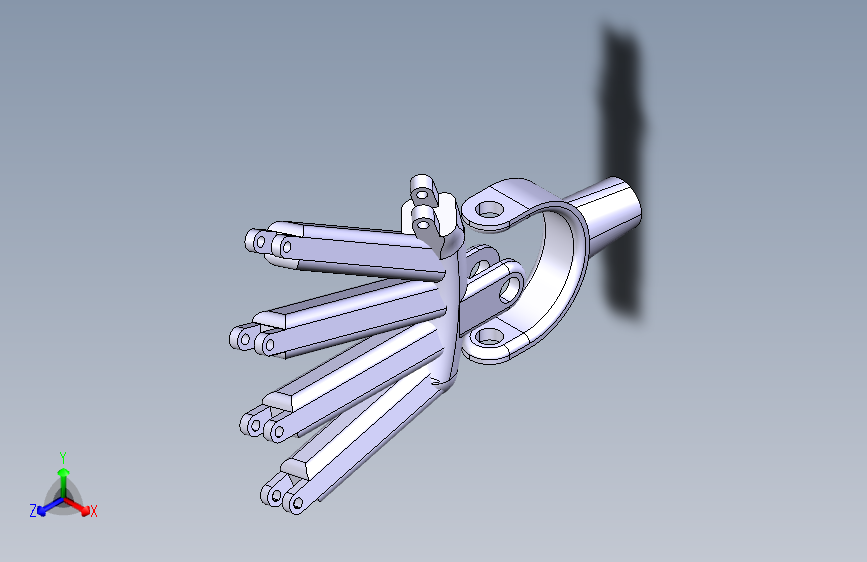
这是一款仿生机械手模型,手指为铰链结构,通过私服电机进行驱动,并通过连杆来传动,手腕通过电机可以进行旋转。solidworks 2018 版本,另有STP格式文件。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.jpg)

0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)

0.png)
0.png)
0.png)


