
登录注册
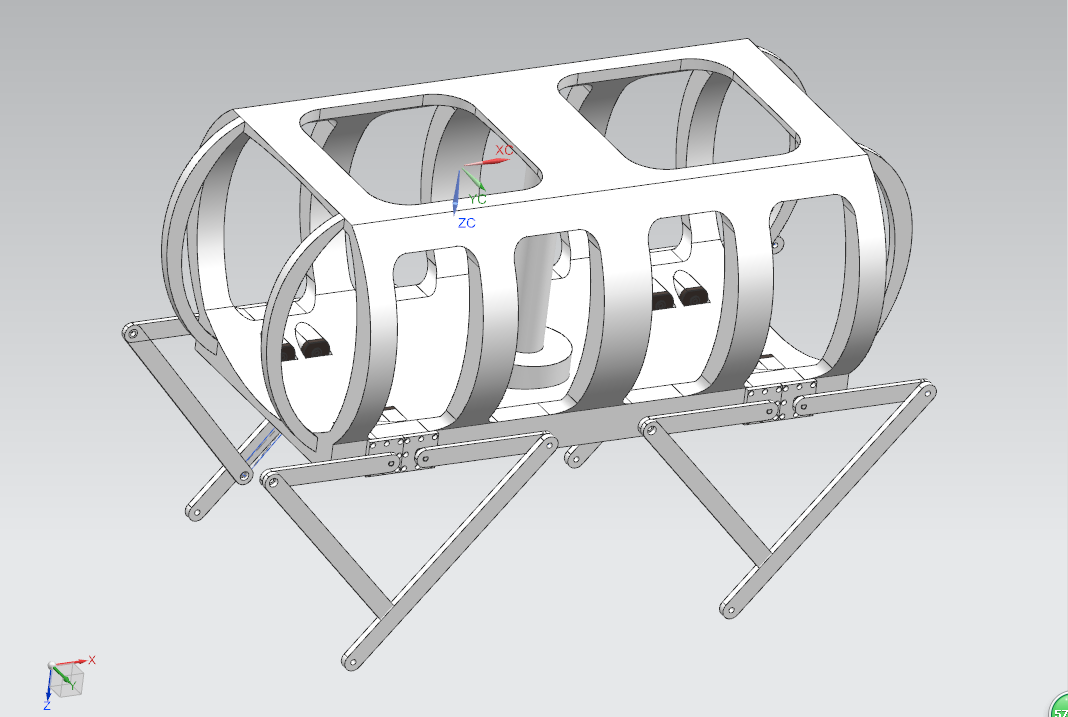
四足行走机器人设计(ID:2739127)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17607981307150.zip | 4.38M |
| 2 | 3D装配图.png | 118.41K |
| 3 | A0-四足行走机器人装配图.dwg | 245.41K |
| 4 | A0-躯干.dwg | 252.70K |
| 5 | A2-安装板.dwg | 209.77K |
| 6 | A2-连杆一.dwg | 211.55K |
| 7 | A2-连杆三.dwg | 211.65K |
| 8 | A2-连杆二.dwg | 211.65K |
| 9 | 四足行走机器人设计.docx | 1.40M |
| 10 | JGA16-050DC__[JGA16-050-35K].prt | 742.89K |
| 11 | __1.prt | 1.10M |
| 12 | __2-__.prt | 57.45K |
| 13 | __2.prt | 120.63K |
| 14 | __3.prt | 127.23K |
| 15 | __4.prt | 164.78K |
| 16 | __5.prt | 110.92K |
| 17 | ___1.prt | 84.36K |
| 18 | 装配体1.igs | 2.54M |
| 19 | 装配体1_igs.prt | 74.40K |
此图纸下载需要1060金币
立即下载
发布者
静
创作: 16676
粉丝: 6
加入时间:2025-05-27

模型信息
图纸格式:dwg,prt,igs
文件大小:4.49M
所需金币:1060
上传时间:2025-10-18 22:35:32
是否可编辑:可修改,包括参数
版本:IGES
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
![拨叉[831007]工艺规程设计](https://html.lazystones.com/lazy/2738875/image/2c5207c7-77f1-4439-9159-72a28dcd0252原图(主)0.png)

0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0_0_364.png)
0.png)
0.png)

