
登录注册
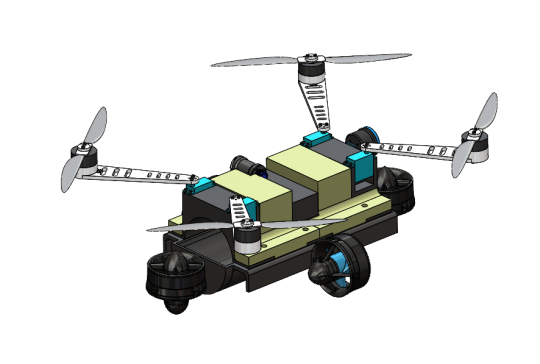
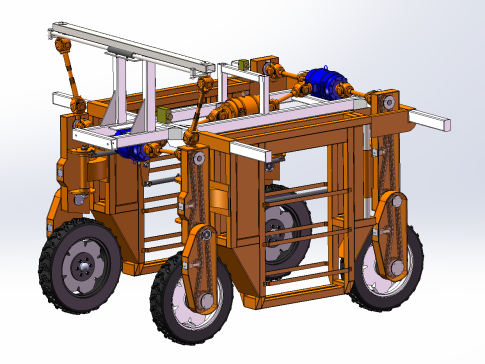
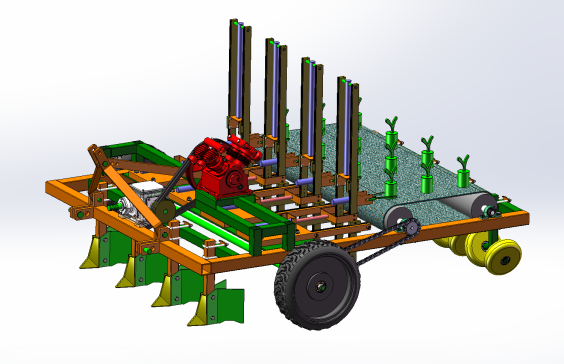
猕猴桃机械臂自动抓取机(ID:376349)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16679178517098.zip | 3.03M |
| 2 | 上臂.SLDPRT | 119.87K |
| 3 | 下臂.SLDPRT | 107.33K |
| 4 | 下臂杆.SLDPRT | 109.26K |
| 5 | 中臂.SLDPRT | 131.62K |
| 6 | 中臂杆.SLDPRT | 108.08K |
| 7 | 右手指.SLDPRT | 123.83K |
| 8 | 左手指.SLDPRT | 166.78K |
| 9 | 底座.SLDPRT | 171.17K |
| 10 | 抓手电机.SLDPRT | 95.46K |
| 11 | 抓手装配体.SLDASM | 169.57K |
| 12 | 抓手装配体.STEP | 645.21K |
| 13 | 拉杆.SLDPRT | 132.33K |
| 14 | 支撑板.SLDPRT | 100.80K |
| 15 | 板.SLDPRT | 50.23K |
| 16 | 滑块上支架.SLDPRT | 92.27K |
| 17 | 电机.SLDPRT | 92.85K |
| 18 | 直线导轨上.SLDPRT | 211.88K |
| 19 | 直线导轨下.SLDPRT | 193.58K |
| 20 | 装配体1.SLDASM | 270.50K |
| 21 | 装配体1.STEP | 1.31M |
| 22 | 说明.doc | 9.50K |
| 23 | 0ac2c4aeaf2fea072cda5aeb6667e77.png | 83.36K |
| 24 | 288edd394a7635c441050b4f93fcf7e.png | 99.69K |
| 25 | 48ab3d974cc9fc60a1896e58a613459.png | 52.83K |
| 26 | 50c456dc201e3d9ea31adcb9ec0b5f8.png | 36.91K |
| 27 | cd5548ced9744d631d9dbd720de0a10.png | 84.25K |
此图纸下载需要250金币
立即下载
发布者
仙人掌设计
创作: 334
粉丝: 20
加入时间:2022-11-04

模型信息
图纸格式:sldprt,sldasm,step
文件大小:3.11M
所需金币:250
上传时间:2022-11-08 22:30:56
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2020
标签
图纸简介
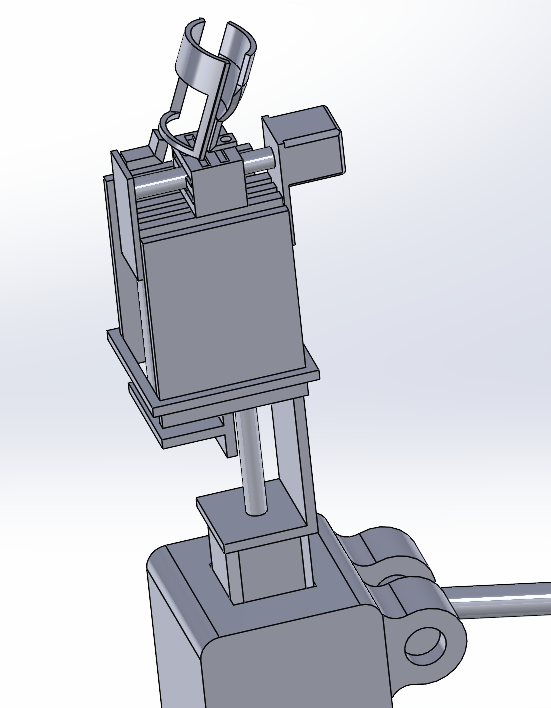
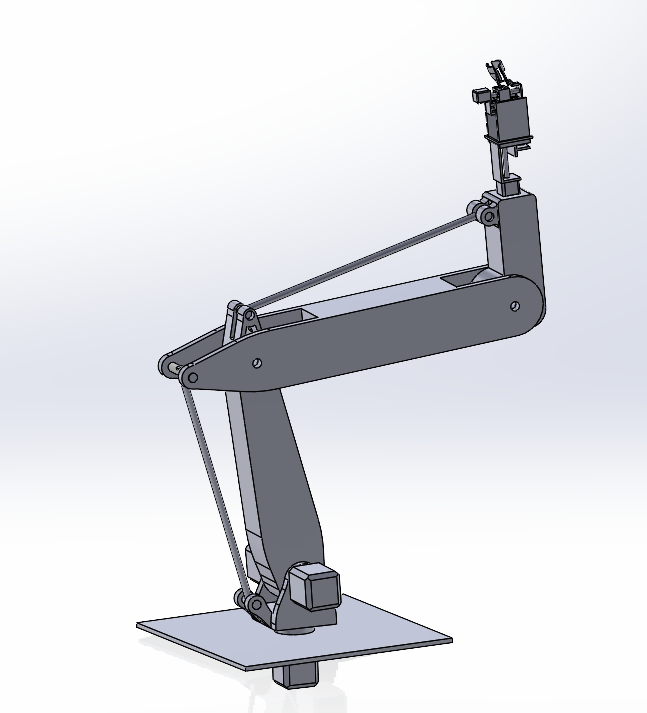
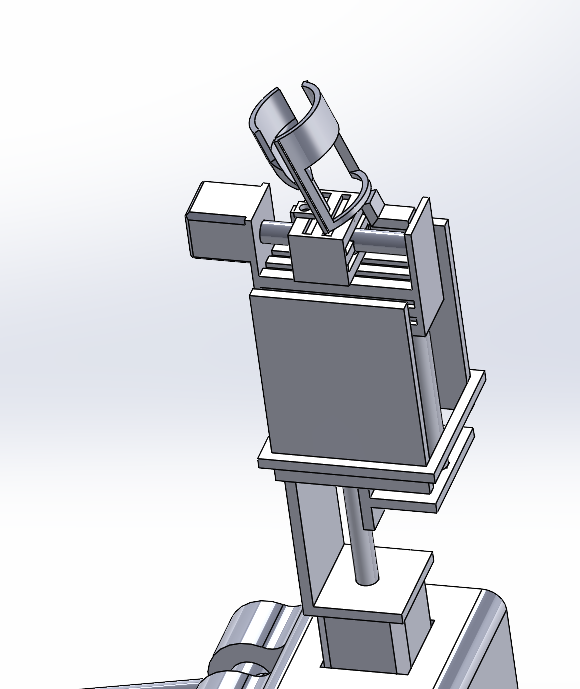
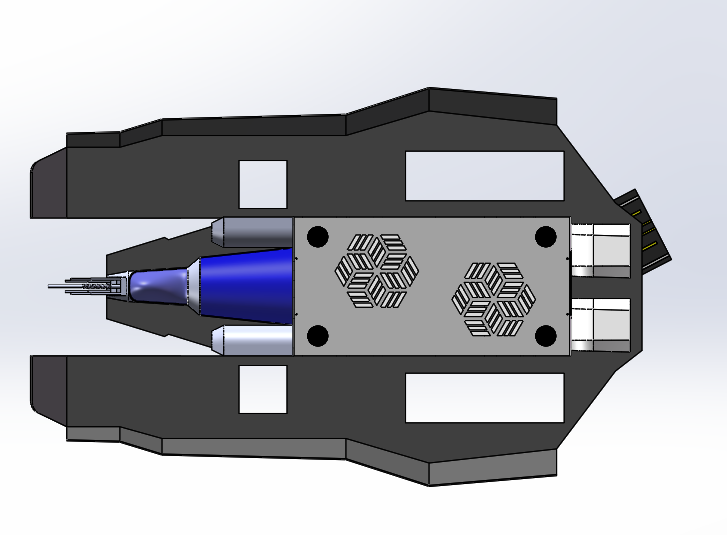
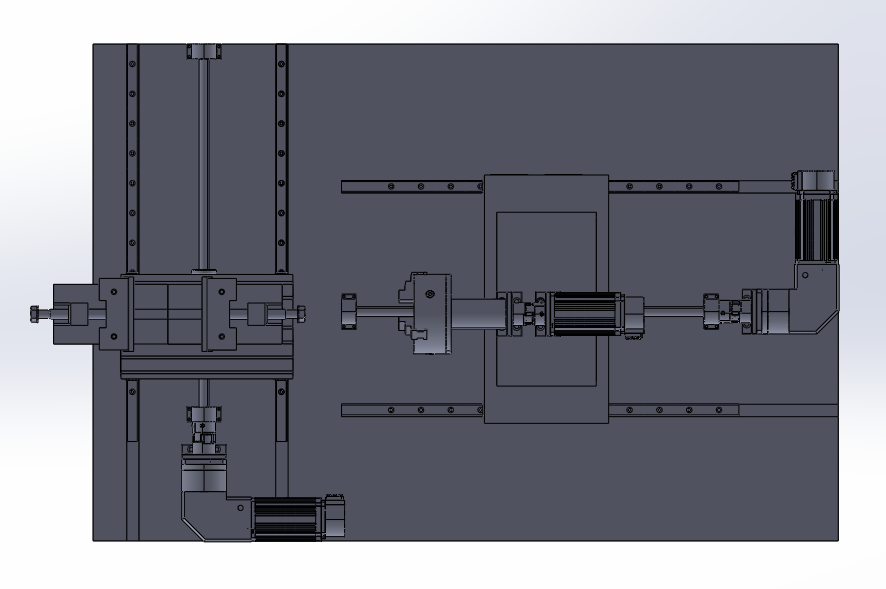
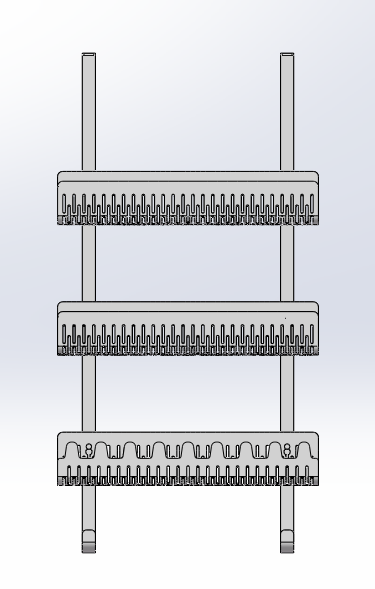
此模型是由SOLIDWORKS20建模二次,有STP格式。农业生产环境较工业生产复杂多变,采摘机器人面对的目标对象有其自身的环境影响和 物理特点,使得研究末端执行器较工业机器人机械手有其自身的技术要求和特殊性。对猕猴桃末端执行器的研究,具有重要的科研价值,并且能够促进生产力的进步。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0_0_364.png)
0.png)
0.png)
0_0_364.png)
0.png)

0.png)
0.png)
0.png)
0.png)

