
登录注册
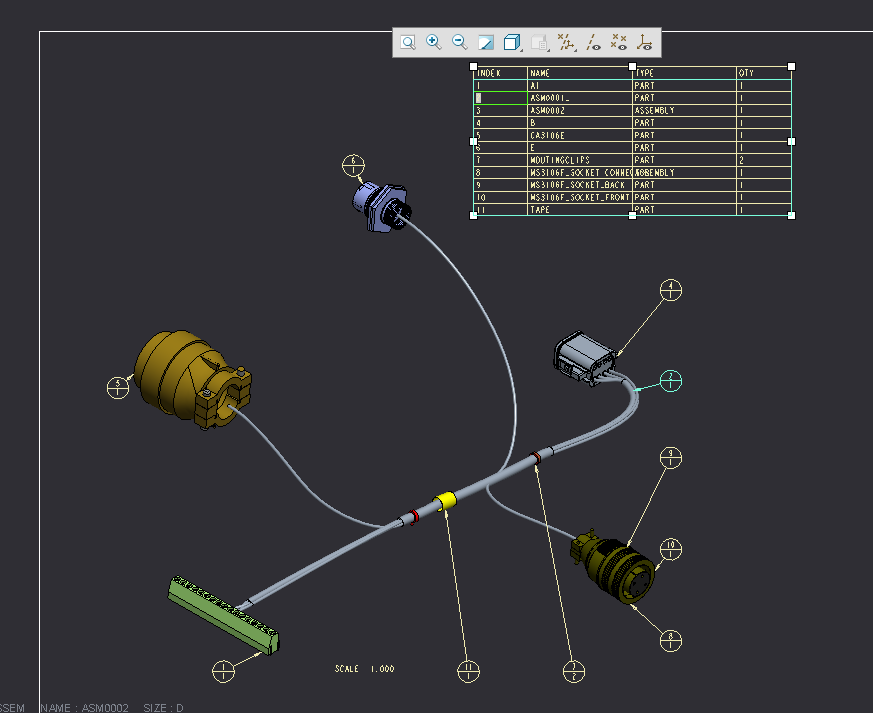
工业机器人手臂(ID:455925)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16729094908981.rar | 18.66M |
| 2 | 9600k51_-_mcmaster.prt.1 | 120.42K |
| 3 | asm0001.asm.1 | 176.91K |
| 4 | base_assembly.asm.1 | 393.15K |
| 5 | bearing_and_motor_base.prt.1 | 252.56K |
| 6 | bearing_house.asm.1 | 54.06K |
| 7 | bearing_house_2.asm.1 | 60.85K |
| 8 | bearing_house_p1.prt.1 | 118.20K |
| 9 | bearing_house_p2.prt.1 | 105.28K |
| 10 | bevel_gear11.prt.1 | 805.66K |
| 11 | bevel_gear22.prt.1 | 446.55K |
| 12 | bevel_gears.asm.1 | 106.33K |
| 13 | bevel_gears1.asm.1 | 50.82K |
| 14 | bevel_gear_assembly_p1.prt.1 | 98.76K |
| 15 | bevel_gear_assembly_p2.prt.1 | 310.83K |
| 16 | bevel_gear_assembly_p3.prt.1 | 103.52K |
| 17 | bevel_gear_assembly_p4.prt.1 | 226.23K |
| 18 | coupling_8_8.prt.1 | 106.28K |
| 19 | cover_p1.prt.1 | 119.29K |
| 20 | cover_p2.prt.1 | 136.83K |
| 21 | cover_p3.prt.1 | 113.48K |
| 22 | cover_p4.prt.1 | 142.45K |
| 23 | cover_p5.prt.1 | 2.04M |
| 24 | cover_p6.prt.1 | 155.04K |
| 25 | cover_p7.prt.1 | 501.47K |
| 26 | cover_p8.prt.1 | 106.57K |
| 27 | cover_p9.prt.1 | 99.74K |
| 28 | din_128_-_a10.prt.1 | 97.54K |
| 29 | din_128_-_a12.prt.1 | 100.31K |
| 30 | din_128_-_a3.prt.1 | 90.74K |
| 31 | din_128_-_a3_5.prt.1 | 91.41K |
| 32 | din_128_-_a4.prt.1 | 96.96K |
| 33 | din_128_-_a5.prt.1 | 95.32K |
| 34 | din_128_-_a6.prt.1 | 95.81K |
| 35 | din_128_-_a8.prt.1 | 96.46K |
| 36 | din_1587_-_m5_x_0_8.prt.1 | 117.22K |
| 37 | din_471_-_17_x_1_5_1_.prt.1 | 98.94K |
| 38 | din_471_-_5_x_0_6.prt.1 | 95.28K |
| 39 | din_471_-_60_x_2_1_.prt.1 | 96.33K |
| 40 | din_471_-_8_x_0_8.prt.1 | 95.85K |
| 41 | din_628_skf_-_skf_qj_203.prt.1 | 267.01K |
| 42 | din_628_skf_-_skf_qj_212.prt.1 | 364.38K |
| 43 | din_7985__h__-_m5x16-h.prt.1 | 140.83K |
| 44 | din_7985__h__-_m5x20-h.prt.1 | 140.28K |
| 45 | encoder_base.prt.1 | 144.32K |
| 46 | encoder_xcc1406tr11k.prt.1 | 1.05M |
| 47 | flat_pulley12.prt.1 | 86.36K |
| 48 | gripper.asm.1 | 162.14K |
| 49 | gripper_p1.prt.1 | 117.25K |
| 50 | gripper_p10.prt.1 | 120.62K |
| 51 | gripper_p2.prt.1 | 118.64K |
| 52 | gripper_p3.prt.1 | 131.92K |
| 53 | gripper_p4.prt.1 | 131.93K |
| 54 | gripper_p5.prt.1 | 96.54K |
| 55 | gripper_p6.prt.1 | 69.67K |
| 56 | gripper_p7.prt.1 | 71.03K |
| 57 | gripper_p8.prt.1 | 65.82K |
| 58 | gripper_p9.prt.1 | 73.38K |
| 59 | iso_10642_-_m3_x__10.prt.1 | 80.63K |
| 60 | iso_10642_-_m4_x__12.prt.1 | 81.55K |
| 61 | iso_4026_-_m4_x_5iso.prt.1 | 77.31K |
| 62 | iso_4026_-_m5_x_10iso.prt.1 | 76.96K |
| 63 | iso_4032_-_m10iso.prt.1 | 103.38K |
| 64 | iso_4032_-_m3iso.prt.1 | 102.46K |
| 65 | iso_4032_-_m5iso.prt.1 | 102.59K |
| 66 | iso_4762_-_m10_x_16iso.prt.1 | 105.16K |
| 67 | iso_4762_-_m10_x_20iso.prt.1 | 102.07K |
| 68 | iso_4762_-_m10_x_25iso.prt.1 | 100.47K |
| 69 | iso_4762_-_m12_x_20iso.prt.1 | 105.42K |
| 70 | iso_4762_-_m12_x_30iso.prt.1 | 101.66K |
| 71 | iso_4762_-_m3_x_12iso.prt.1 | 101.58K |
| 72 | iso_4762_-_m3_x_25iso.prt.1 | 94.03K |
| 73 | iso_4762_-_m3_x_30iso.prt.1 | 90.91K |
| 74 | iso_4762_-_m3_x_5iso.prt.1 | 104.86K |
| 75 | iso_4762_-_m4_x_25iso.prt.1 | 94.31K |
| 76 | iso_4762_-_m5_x_16iso.prt.1 | 100.79K |
| 77 | iso_4762_-_m6_x_16iso.prt.1 | 100.82K |
| 78 | iso_4762_-_m8_x_16iso.prt.1 | 102.51K |
| 79 | iso_7089_-_5_-_140_hv_1_.prt.1 | 64.04K |
| 80 | iso_7380_-_m5_x_10.prt.1 | 109.38K |
| 81 | jis_b_1521_skf__f__-_skf_608-rz.prt.1 | 303.91K |
| 82 | motor_assembly_base_p1.prt.1 | 219.70K |
| 83 | motor_assembly_base_p2.prt.1 | 219.03K |
| 84 | motor_assembly_base_p3.prt.1 | 124.77K |
| 85 | motor_assembly_base_p4.prt.1 | 142.71K |
| 86 | motor_assembly_base_p5.prt.1 | 158.88K |
| 87 | motor_assembly_base_p6.prt.1 | 110.29K |
| 88 | motor_base_sheet_metal.prt.1 | 386.82K |
| 89 | robot_arm.asm.1 | 300.38K |
| 90 | robot_arm1_p1.prt.1 | 192.55K |
| 91 | robot_arm1_p2.prt.1 | 186.33K |
| 92 | robot_arm2.asm.1 | 45.07K |
| 93 | robot_arm2_p1.prt.1 | 180.88K |
| 94 | robot_arm2_p2.prt.1 | 94.04K |
| 95 | robot_arm2_p3.prt.1 | 138.68K |
| 96 | robot_arm2_p4.prt.1 | 93.84K |
| 97 | robot_arm2_p5.prt.1 | 65.56K |
| 98 | robot_arm2_p6.prt.1 | 180.40K |
| 99 | robot_arm2_p7.prt.1 | 92.28K |
| 100 | rod_1.prt.1 | 107.85K |
| 101 | rod_2.prt.1 | 56.52K |
| 102 | rod_3.prt.1 | 127.75K |
| 103 | rod_4.prt.1 | 102.77K |
| 104 | rod_5.prt.1 | 53.82K |
| 105 | rod_6.prt.1 | 146.26K |
| 106 | rod_7.prt.1 | 116.24K |
| 107 | rod_8.prt.1 | 51.81K |
| 108 | rotation_axis_p1.prt.1 | 202.31K |
| 109 | synchronous_belt1-296971.prt.1 | 69.52K |
| 110 | synchronous_belt2.prt.1 | 72.02K |
| 111 | synchronous_belt3.prt.1 | 71.91K |
| 112 | synchronous_belts_transm-296975.asm.1 | 48.28K |
| 113 | synchronous_belts_transmission2.asm.1 | 52.03K |
| 114 | synchronous_belts_transmission3.asm.1 | 57.07K |
| 115 | synchronous_pulley11-296972.prt.1 | 516.23K |
| 116 | synchronous_pulley11-296972_mir.prt.1 | 418.18K |
| 117 | synchronous_pulley12.prt.1 | 904.51K |
| 118 | synchronous_pulley13.prt.1 | 1000.93K |
| 119 | synchronous_pulley21-296973.prt.1 | 590.78K |
| 120 | synchronous_pulley21_for_arm1.prt.1 | 572.90K |
| 121 | synchronous_pulley22.prt.1 | 660.86K |
| 122 | synchronous_pulley23.prt.1 | 669.61K |
| 123 | worm2.prt.1 | 219.81K |
| 124 | worm_gear2.prt.1 | 413.54K |
| 125 | worm_gears2.asm.1 | 48.98K |
| 126 | zpt.asm.1 | 46.44K |
此图纸下载需要50金币
立即下载
发布者
曾经的天空
创作: 113570
粉丝: 165
加入时间:2022-11-10

模型信息
图纸格式:prt
文件大小:19.11M
所需金币:50
上传时间:2023-01-05 17:05:18
是否可编辑:可修改,包括参数
版本:PROE
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.jpg)
0.png)
0.jpg)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)

