
登录注册
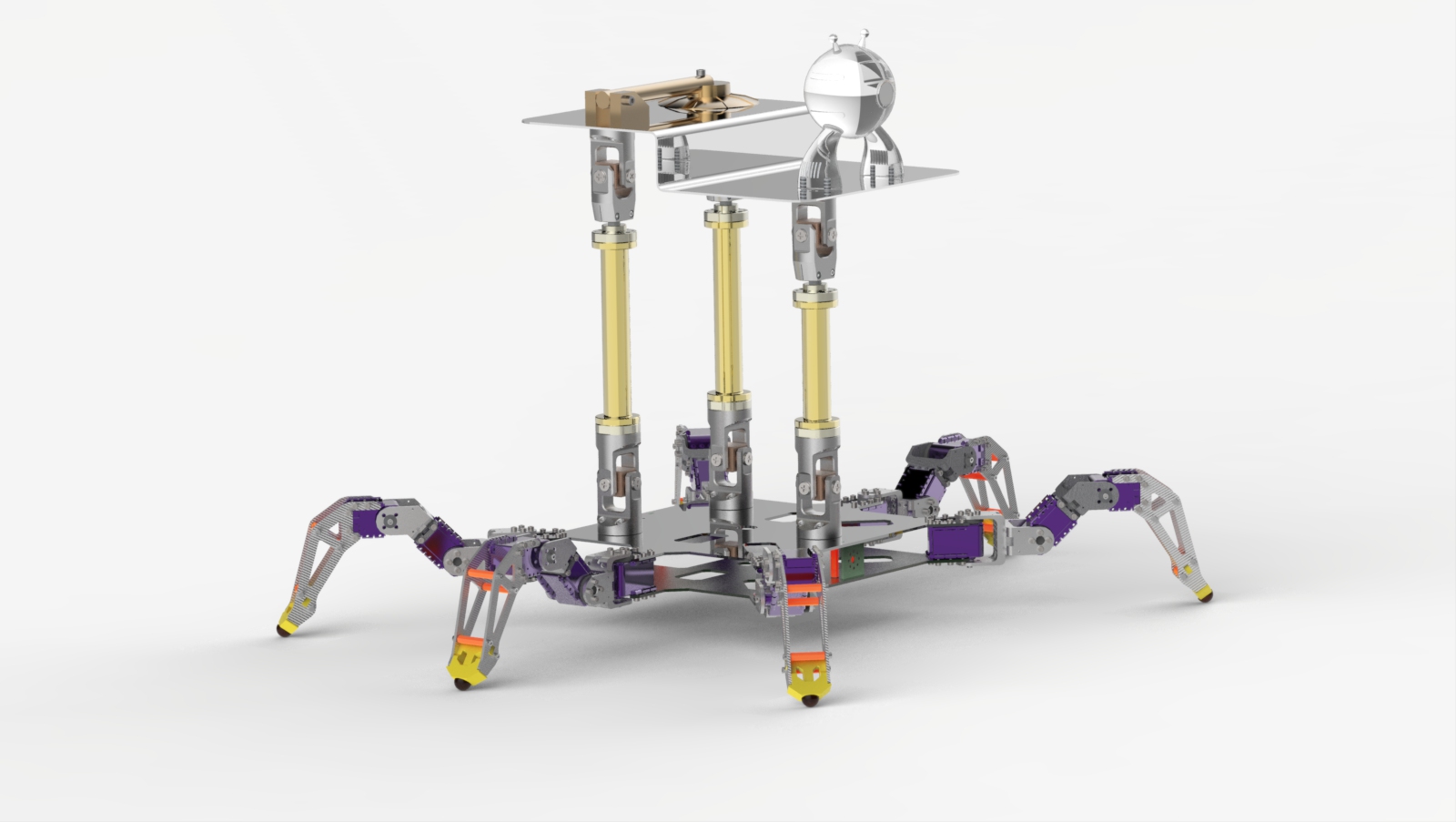
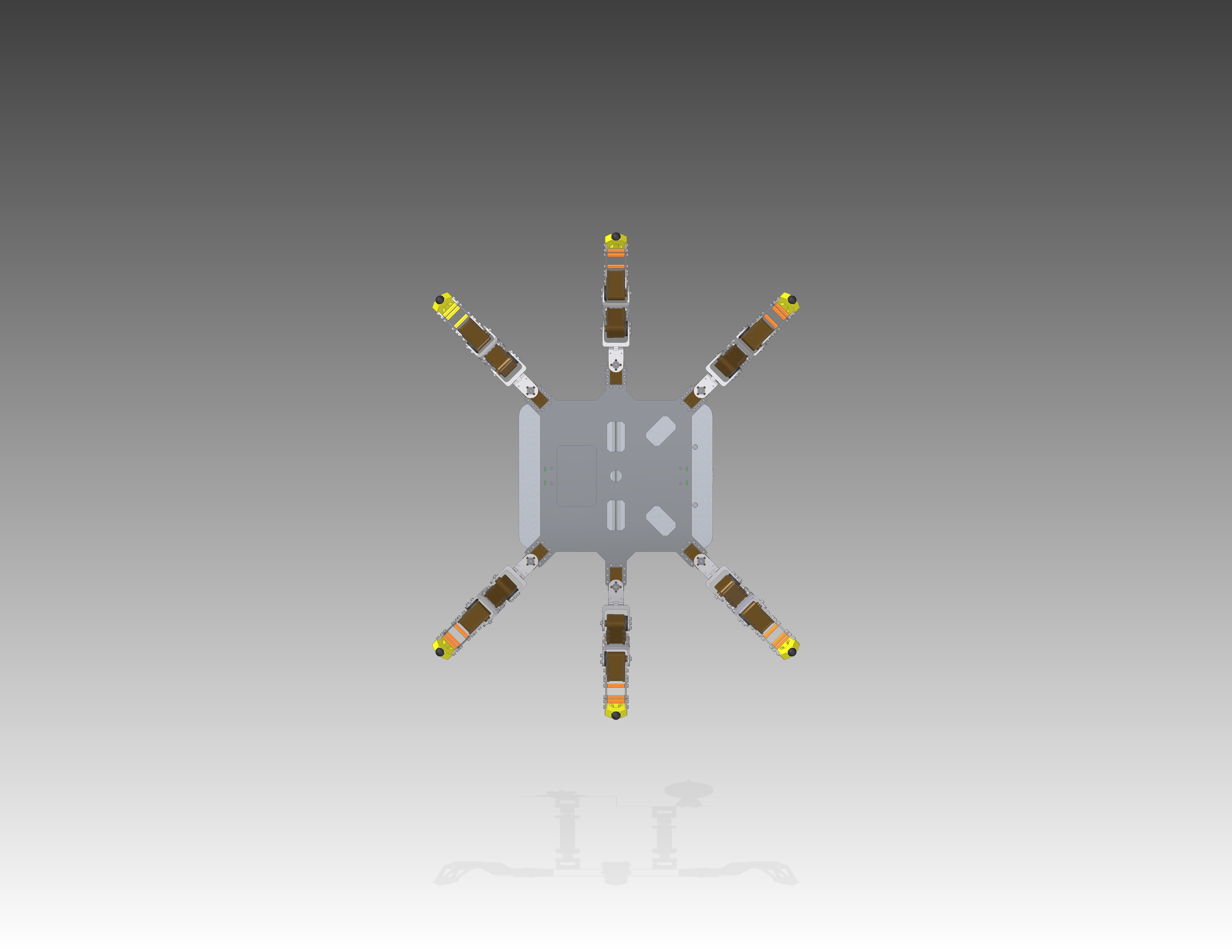
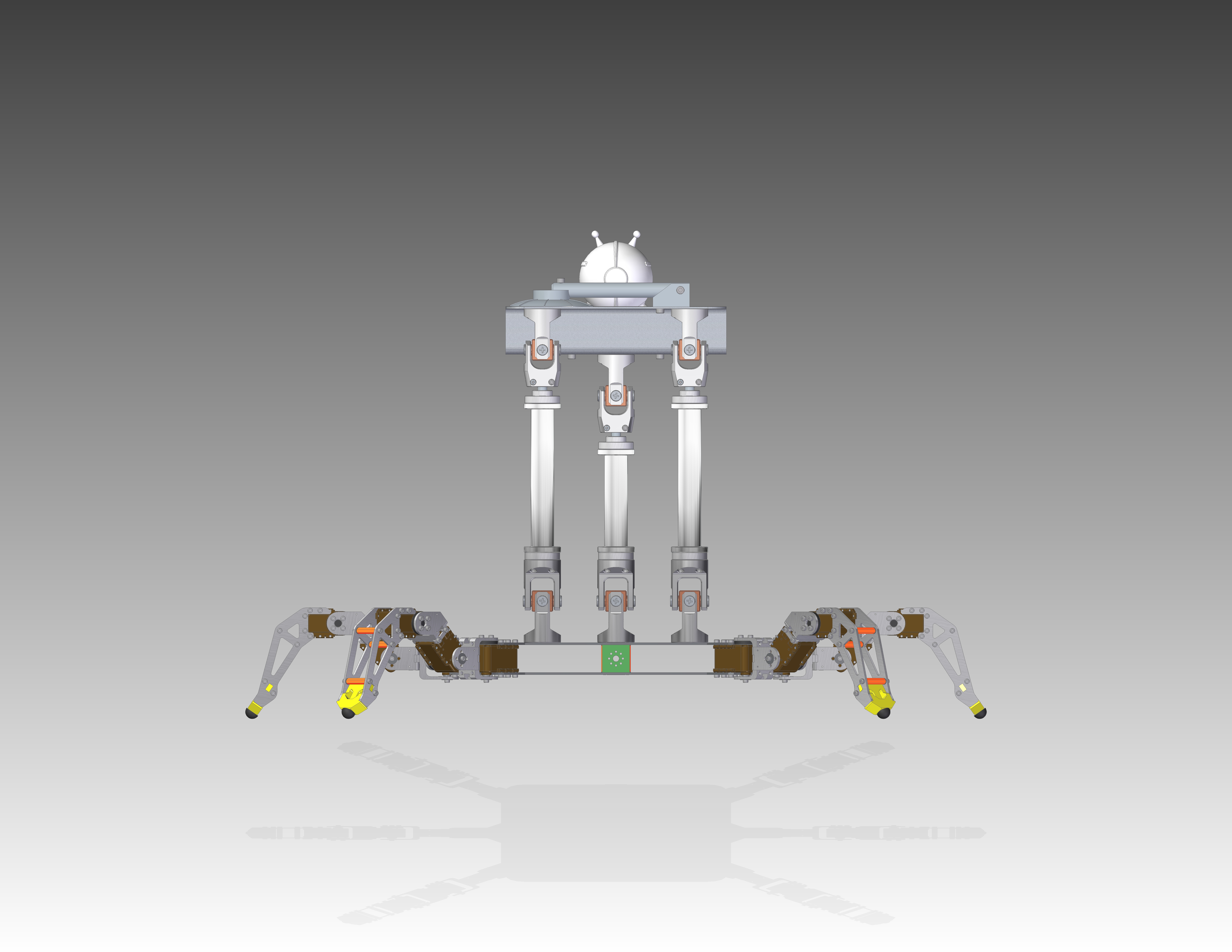
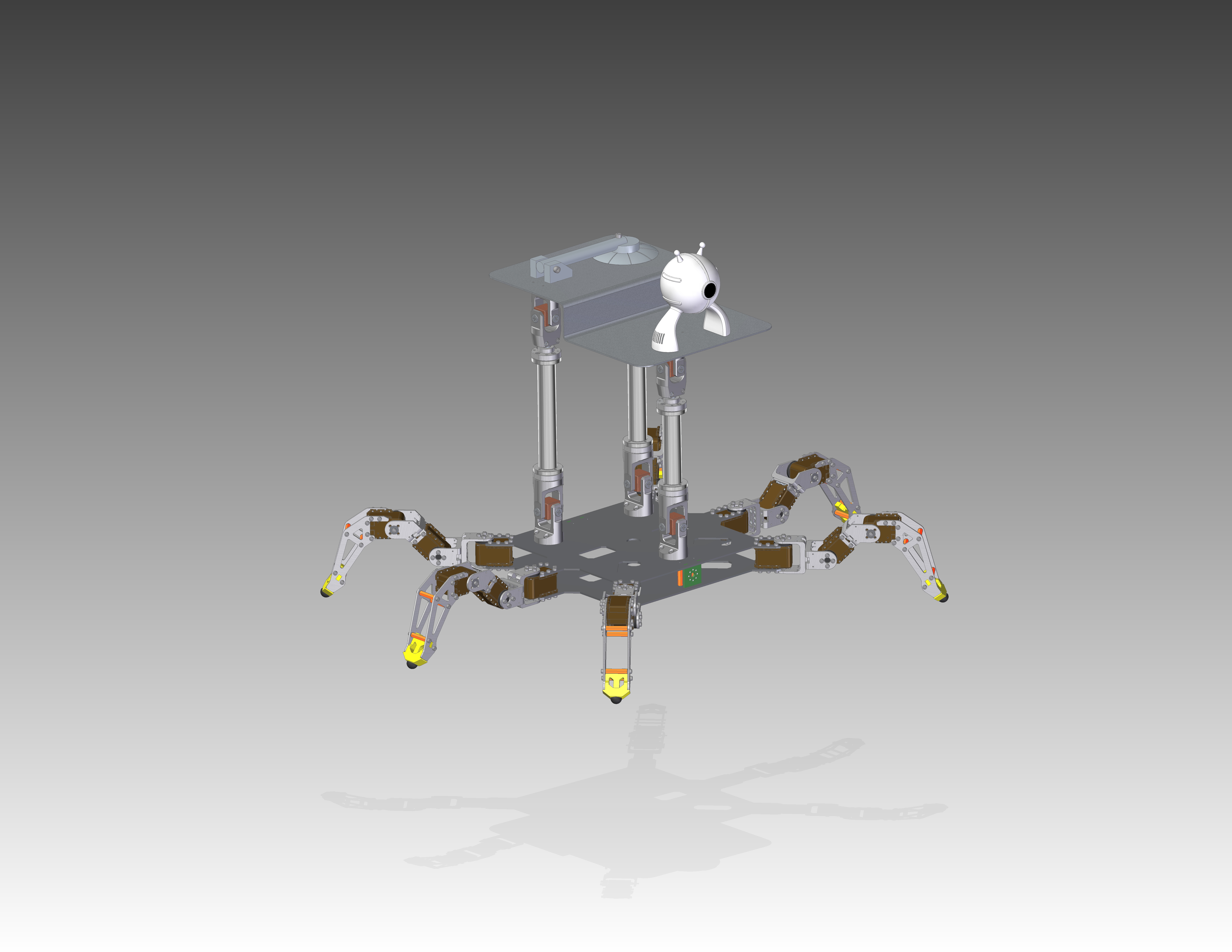
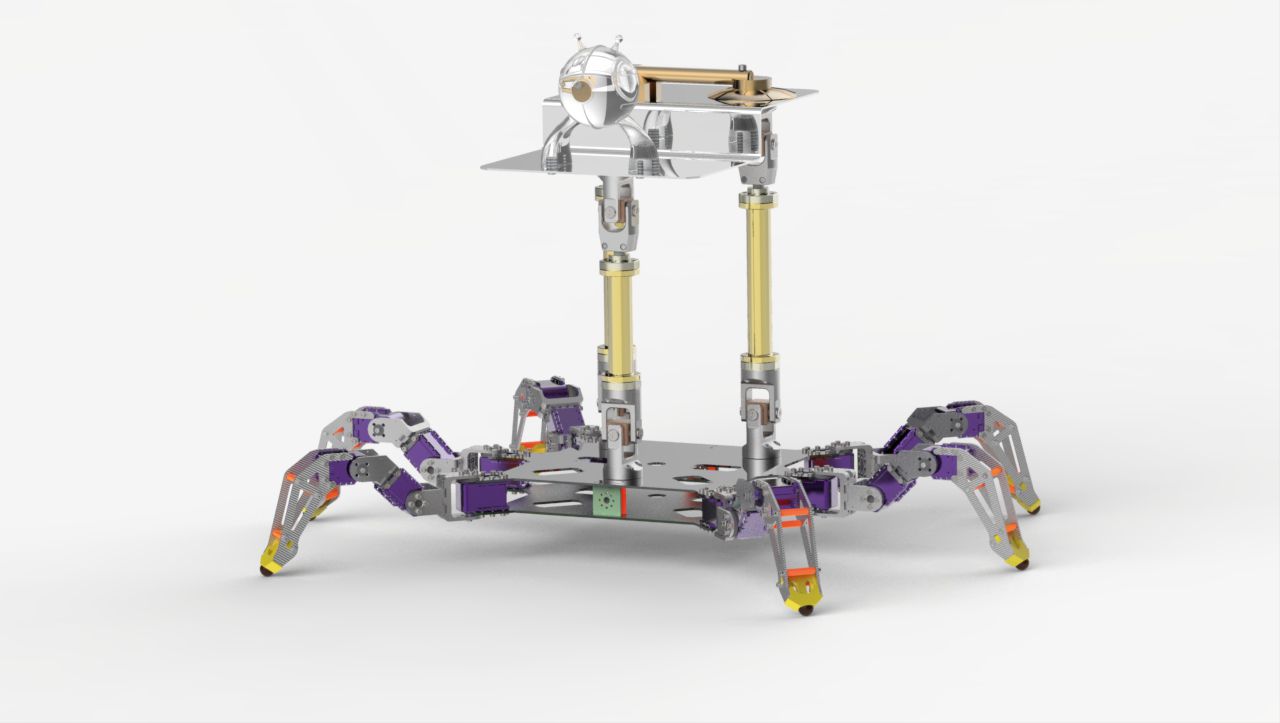
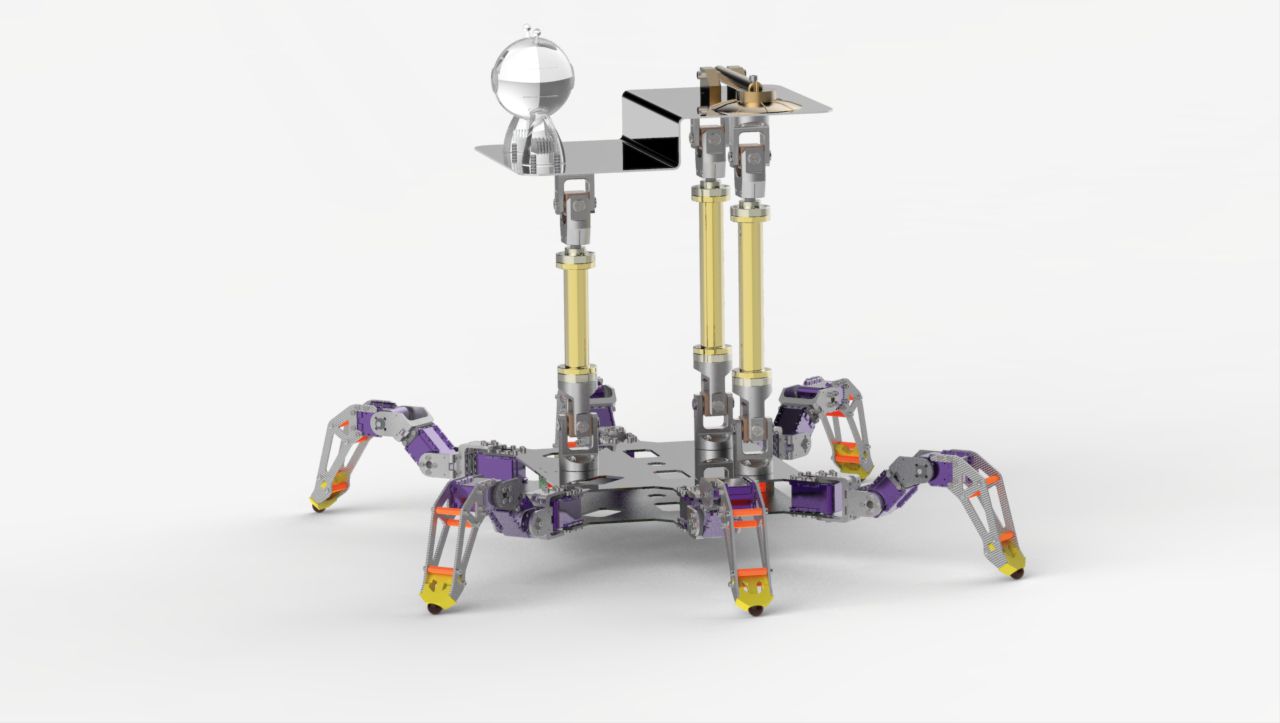
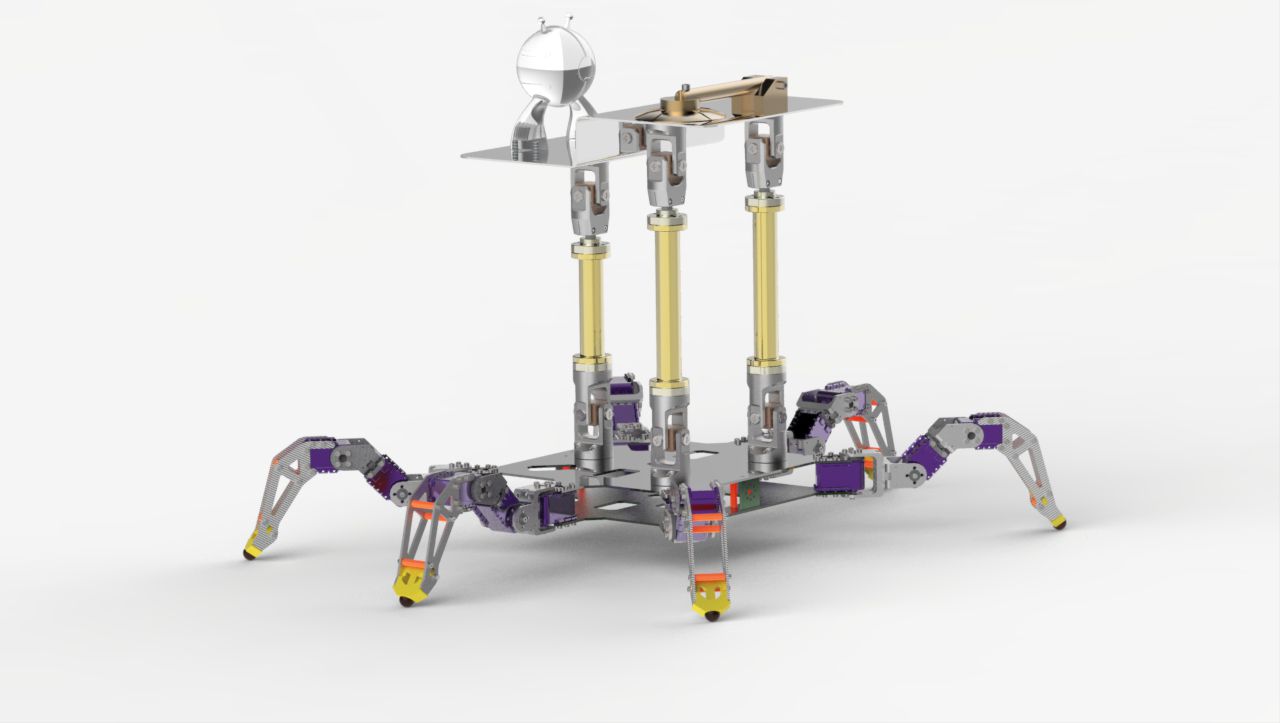
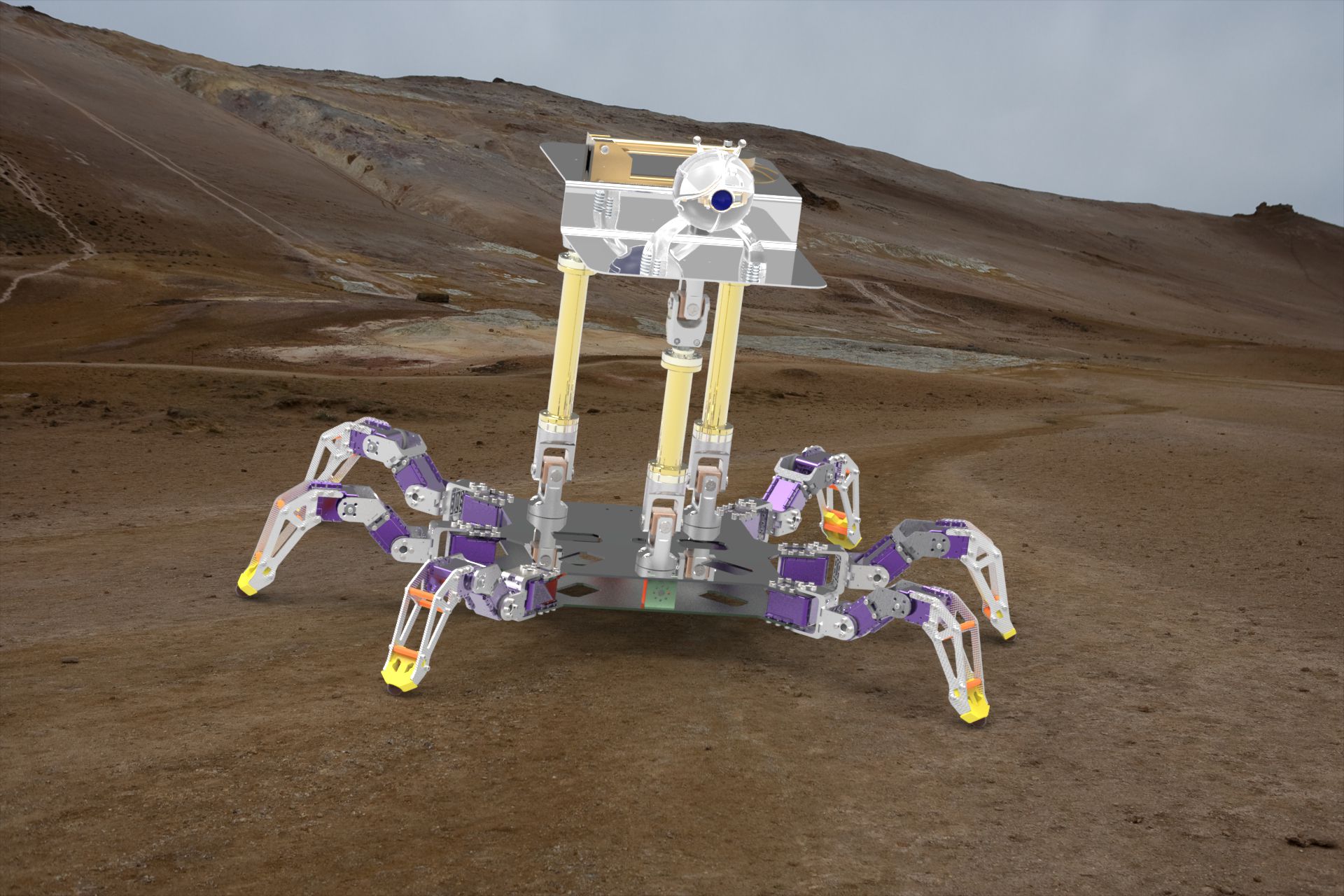
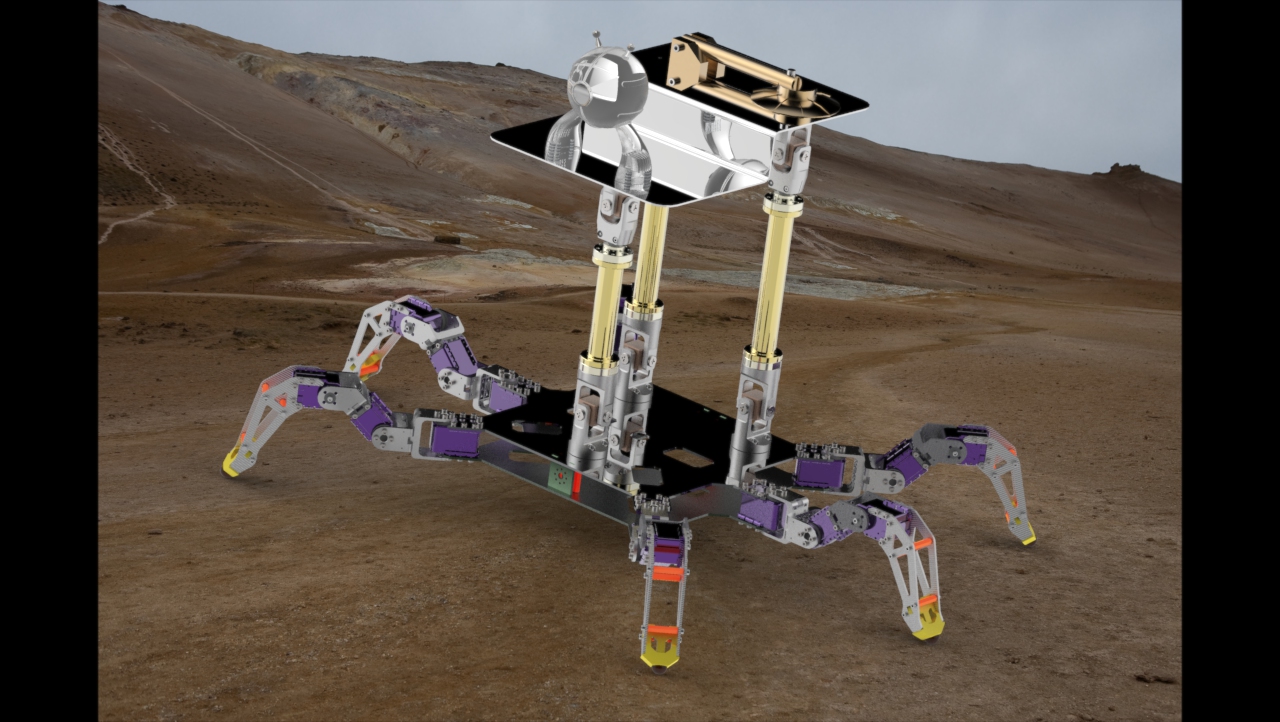
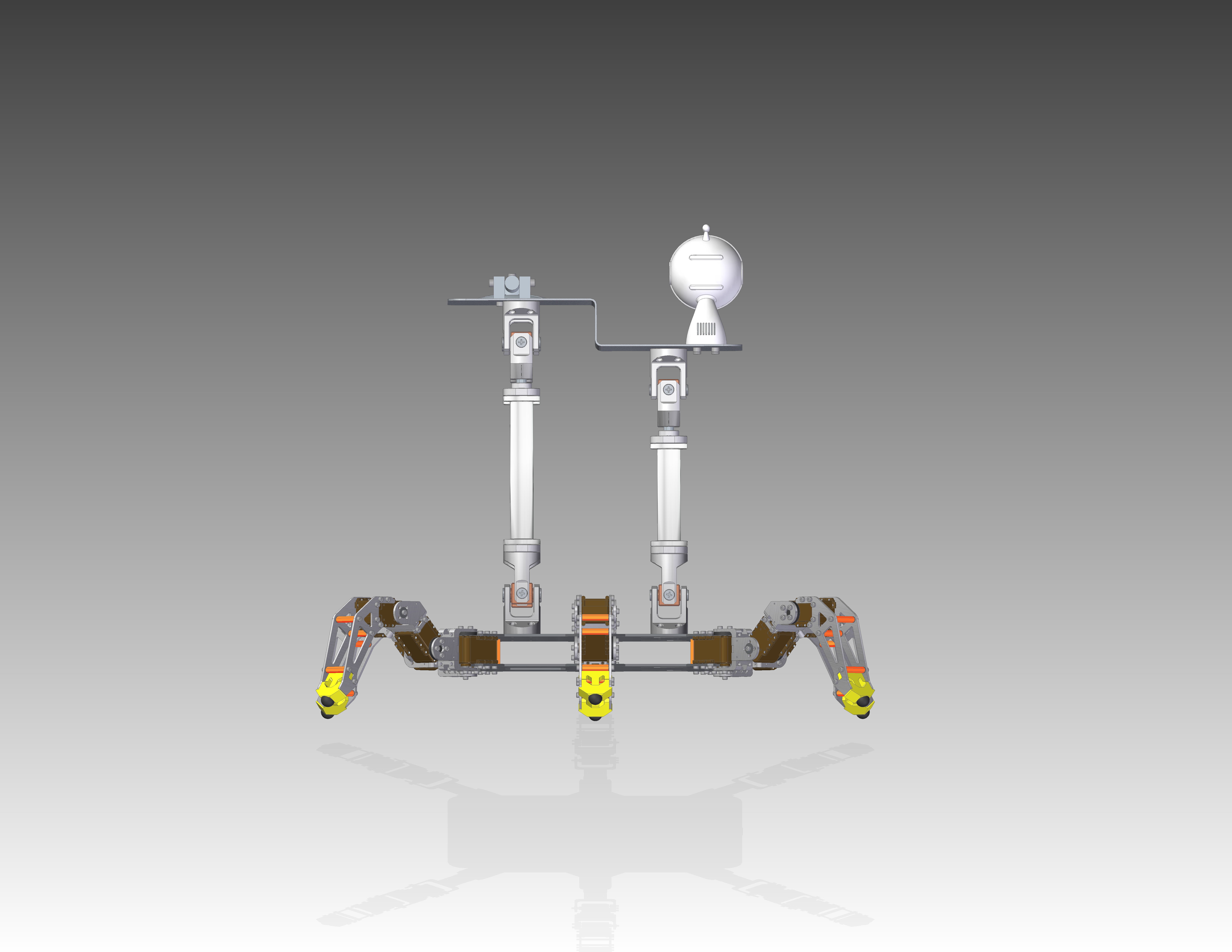
相机六足机器人(ID:569446)
0.png)
1.png)
2.png)
3.png)
4.png)










| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16811090445872.zip | 126.67M |
| 2 | act_tube_100.par | 1.70M |
| 3 | act_tube_150.par | 888.50K |
| 4 | antenna.par | 517.50K |
| 5 | bottom_body.par | 1.31M |
| 6 | camera.par | 4.92M |
| 7 | camerahexapodrobotwitharms.bip | 31.97M |
| 8 | connector_joint_piston.par | 428.50K |
| 9 | connector_joint_piston_top.par | 609.50K |
| 10 | hexapod.asm | 423.00K |
| 11 | hexapod.cfg | 24.00K |
| 12 | hexapod_arms_robot.asm | 949.50K |
| 13 | hexapod_arms_robot.cfg | 41.50K |
| 14 | hexapod_arms_robot.igs | 51.65M |
| 15 | joint_bearing.par | 416.00K |
| 16 | joint_body_leg.par | 1.70M |
| 17 | joint_connector.asm | 250.50K |
| 18 | joint_connector.cfg | 6.00K |
| 19 | joint_connector.par | 2.28M |
| 20 | joint_connector_135.par | 1.17M |
| 21 | joint_connector_135_mir.par | 696.00K |
| 22 | joint_connector_block.par | 423.50K |
| 23 | joint_connector_mir.asm | 276.00K |
| 24 | joint_pin_1.par | 253.50K |
| 25 | joint_short_connector.par | 1.01M |
| 26 | joint_with_body.par | 634.00K |
| 27 | joint_with_top_pipe.par | 809.50K |
| 28 | leg_1.asm | 403.00K |
| 29 | leg_1.cfg | 9.50K |
| 30 | leg_1_mir.asm | 362.00K |
| 31 | leg_ground.par | 541.50K |
| 32 | leg_plate.par | 489.00K |
| 33 | lower_main_body.asm | 243.50K |
| 34 | lower_main_body.cfg | 6.50K |
| 35 | M3-10_bolt.par | 284.00K |
| 36 | M3-15_bolt.par | 551.50K |
| 37 | M3-20_bolt.par | 283.00K |
| 38 | M3-4_bolt.par | 278.50K |
| 39 | M3-6_bolt.par | 285.00K |
| 40 | M3-8_bolt.par | 284.00K |
| 41 | M3_nut.par | 328.50K |
| 42 | M3_washer.par | 179.00K |
| 43 | M3_washer_D12.par | 185.00K |
| 44 | M5-12_flat_bolt.par | 281.00K |
| 45 | M5-15_bolt.par | 284.00K |
| 46 | M5-8_bolt.par | 286.50K |
| 47 | middle_support_frame.par | 283.00K |
| 48 | middle_support_rod_M3.asm | 166.50K |
| 49 | middle_support_rod_M3.cfg | 4.00K |
| 50 | middle_support_rod_M3.par | 254.00K |
| 51 | pipe_D16_100.par | 331.50K |
| 52 | pipe_D16_150.par | 330.50K |
| 53 | top_body.par | 1.44M |
| 54 | top_piston_arm.asm | 315.50K |
| 55 | top_piston_arm.cfg | 6.50K |
| 56 | top_piston_short_arm.asm | 317.00K |
| 57 | top_piston_short_arm.cfg | 4.50K |
| 58 | top_plate.par | 469.00K |
| 59 | 0_0.jpg | 49.42K |
| 60 | 0_0_0.jpg | 336.96K |
| 61 | 0_1.jpg | 50.70K |
| 62 | 0_1_1.jpg | 337.27K |
| 63 | 0_2.jpg | 49.35K |
| 64 | 0_2_2.jpg | 334.27K |
| 65 | 0_3.jpg | 49.55K |
| 66 | 0_3_3.jpg | 339.13K |
| 67 | 0_4.jpg | 50.91K |
| 68 | 0_4_4.jpg | 337.45K |
| 69 | 0_5.jpg | 50.59K |
| 70 | 0_6.jpg | 50.07K |
| 71 | camerahexapodrobotwitharms.63.jpg | 460.05K |
| 72 | camerahexapodrobotwitharms.jpg | 225.63K |
| 73 | camerahexapodrobotwitharms_1.60.jpg | 514.09K |
| 74 | hexapod_arms_robot.jpg | 2.01M |
| 75 | hexapod_arms_robot_1.jpg | 1.68M |
| 76 | hexapod_arms_robot_behind.jpg | 1.85M |
| 77 | hexapod_arms_robot_BOT.jpg | 1.59M |
| 78 | hexapod_arms_robot_front.jpg | 1.86M |
此图纸下载需要10金币
立即下载
发布者
攘外必先安内。
创作: 76083
粉丝: 795
加入时间:2021-05-06
模型信息
图纸格式:igs
文件大小:129.71M
所需金币:10
上传时间:2023-04-10 14:46:13
是否可编辑:可修改,包括参数
版本:PROE
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)

0_0_364.png)
0.png)
0.png)
0.png)
0.jpg)

0.png)

0.png)
0.png)
0_0_364.png)

