
登录注册
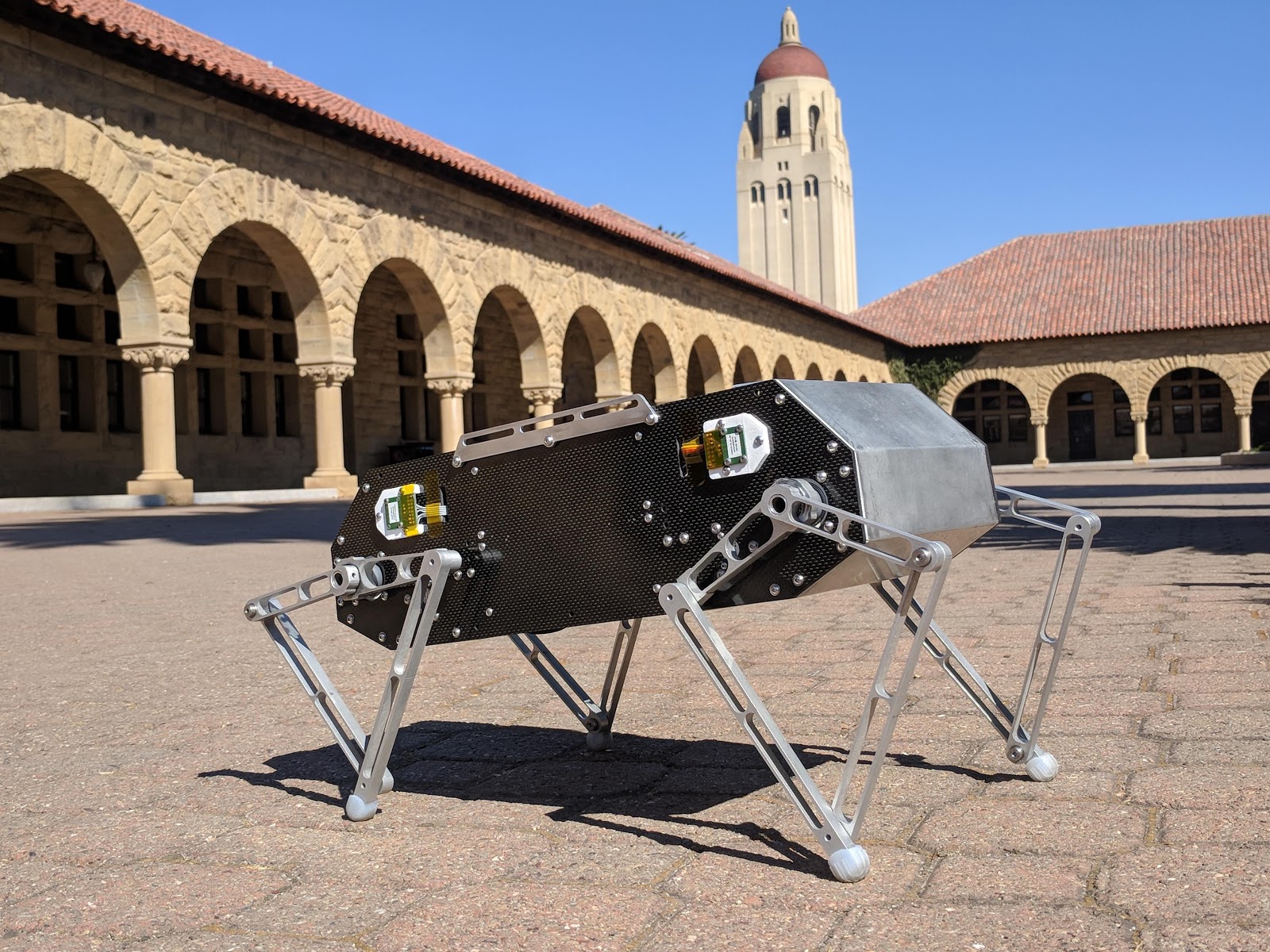
007--斯坦福Doggo会空翻的机器狗四足机器人相关图纸、控制源码、论文、视频(ID:572778)
0.png)
1.png)
2.png)
3.png)
4.png)





| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16813765529022.zip | 38.69M |
| 2 | AnOpen-SourceQuasi-Direct-DriveQuadruped.pdf | 2.13M |
| 3 | Doggo-master.zip | 35.39K |
| 4 | Doggo会空翻的机器狗四足机器人3D图纸STPIGS格式.zip | 19.92M |
| 5 | MeetDoggo-Stanfordsstudentbuiltfour-leggedrobot.mp4 | 12.30M |
| 6 | StanfordDoggoProject-master.zip | 4.41M |
| 7 | .gitignore | 53B |
| 8 | .gitmodules | 325B |
| 9 | platformio.ini | 464B |
| 10 | README.md | 3.34K |
| 11 | readme.txt | 1004B |
| 12 | LICENSE | 1.04K |
| 13 | ODriveArduino.cpp | 12.52K |
| 14 | ODriveArduino.h | 2.43K |
| 15 | README.md | 393B |
| 16 | ODriveArduinoTest.ino | 3.27K |
| 17 | backflip.cpp | 3.91K |
| 18 | backflip.h | 170B |
| 19 | config.h | 1.65K |
| 20 | datalog.cpp | 1.88K |
| 21 | datalog.h | 154B |
| 22 | debug.cpp | 1.94K |
| 23 | debug.h | 224B |
| 24 | globals.cpp | 1.75K |
| 25 | globals.h | 2.32K |
| 26 | imu.cpp | 4.92K |
| 27 | imu.h | 160B |
| 28 | jump.cpp | 2.67K |
| 29 | jump.h | 307B |
| 30 | jump.hpp | 2.96K |
| 31 | main.cpp | 5.55K |
| 32 | position_control.cpp | 20.59K |
| 33 | position_control.h | 2.41K |
| 34 | uart.cpp | 7.32K |
| 35 | uart.h | 952B |
| 36 | usb_serial.cpp | 5.04K |
| 37 | usb_serial.h | 244B |
| 38 | FullDoggoCAD002.stp | 27.62M |
| 39 | FullDoggoCAD03.dwg | 8.72M |
| 40 | FullDoggoCAD04.igs | 52.76M |
| 41 | diagram.jpeg | 234.35K |
| 42 | foot.jpeg | 281.20K |
| 43 | frame.jpeg | 259.03K |
| 44 | hero.jpeg | 541.35K |
| 45 | hero.jpg | 1.20M |
| 46 | joint.png | 114.33K |
| 47 | sides.jpeg | 640.90K |
| 48 | .gitignore | 10B |
| 49 | .gitmodules | 180B |
| 50 | LICENSE | 1.04K |
| 51 | README.md | 11.41K |
| 52 | FullCAD | 23B |
| 53 | belly.jpeg | 263.98K |
| 54 | coax.jpeg | 301.93K |
| 55 | diagram.jpeg | 234.35K |
| 56 | electronics.jpeg | 544.84K |
| 57 | foot.jpeg | 281.20K |
| 58 | frame.jpeg | 259.03K |
| 59 | hero.jpeg | 541.35K |
| 60 | hero.jpg | 1.20M |
| 61 | joint.png | 114.33K |
| 62 | sides.jpeg | 640.90K |
| 63 | trajectory.png | 52.89K |
| 64 | wiring.png | 78.68K |
此图纸下载需要45金币
立即下载
发布者
过了夏天就立秋
创作: 125459
粉丝: 314
加入时间:2022-04-21

模型信息
图纸格式:pdf,igs
文件大小:39.62M
所需金币:45
上传时间:2023-04-13 17:02:40
是否可编辑:可修改,包括参数
版本:IGES
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。



0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)

