
登录注册
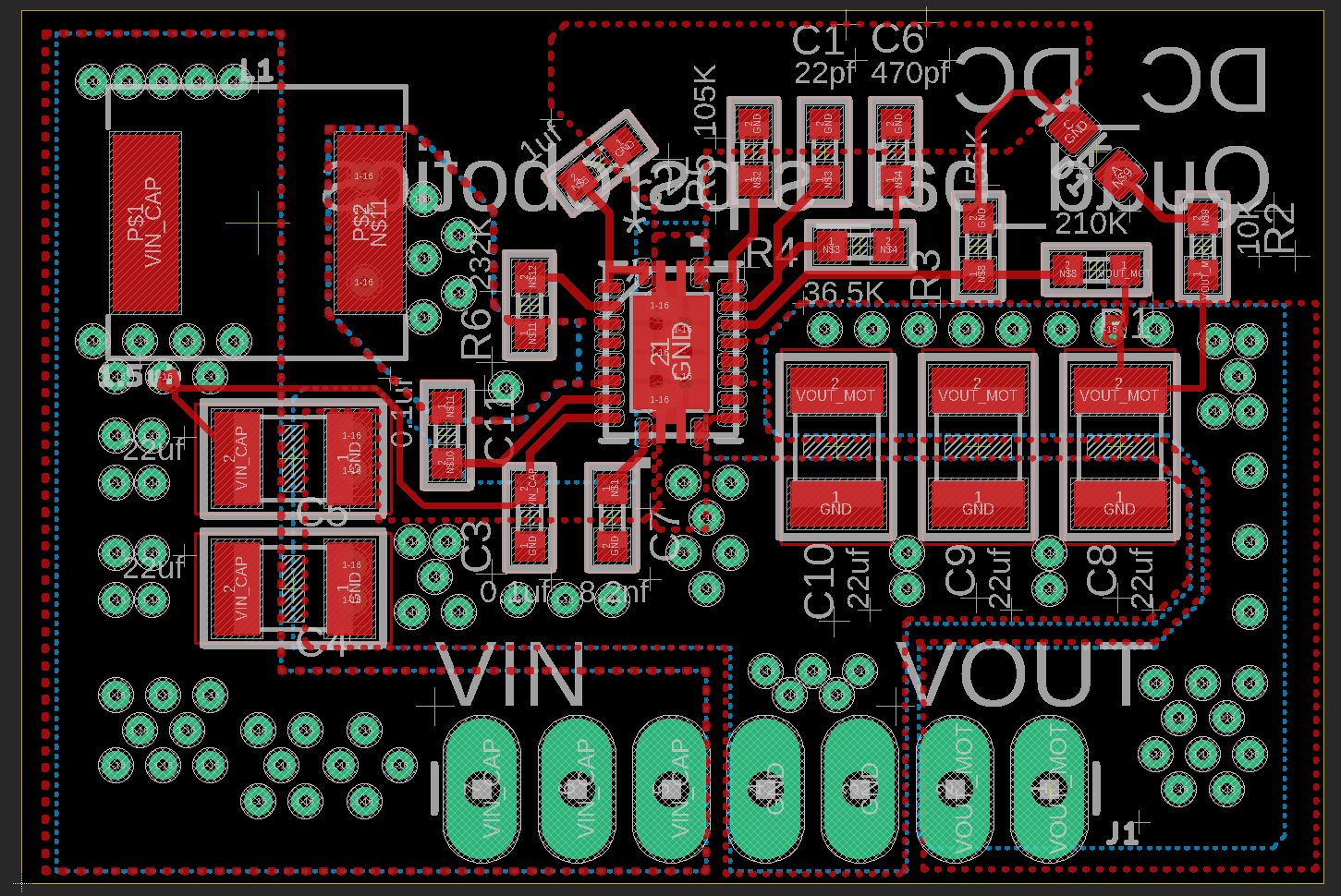
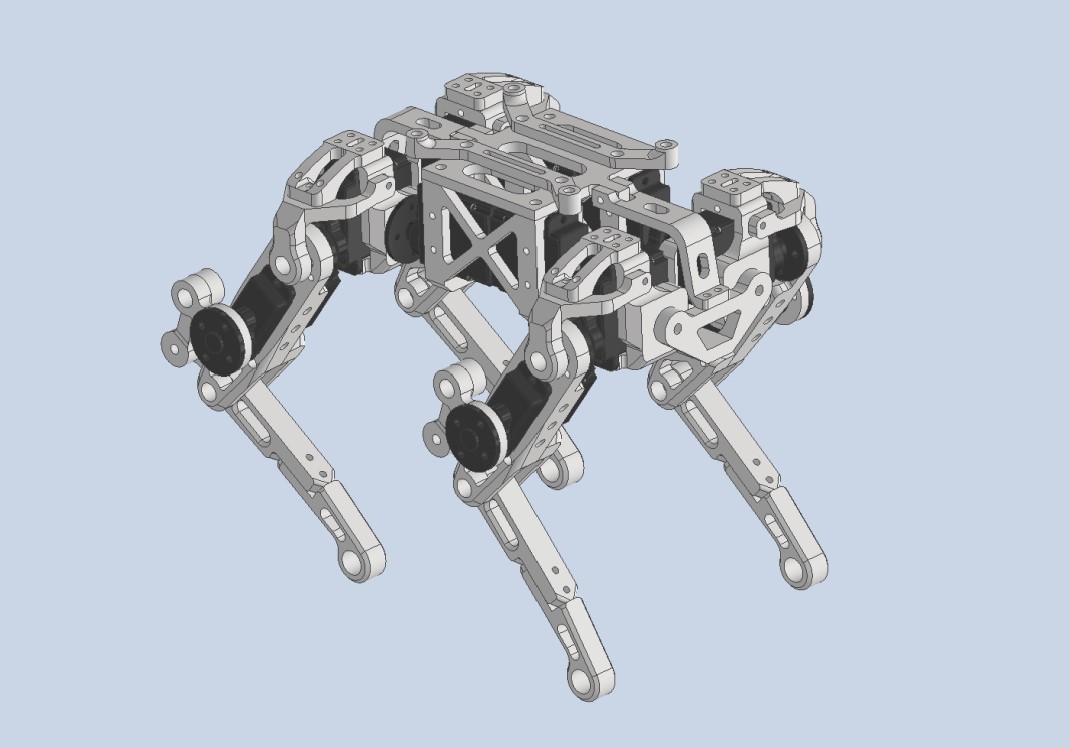
Quadruped bai tiny 12自由度四足机器狗设计 STEP STL格式 附电路设计和控制源代码(ID:686709)
0.png)


1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16910258586285.zip | 42.15M |
| 2 | Quadrupedbai_tdemo6.mp4 | 2.11M |
| 3 | quadrupedtinywalktest.mp4 | 27.17M |
| 4 | 小小四足机器狗自平衡测试.mp4 | 5.17M |
| 5 | .gitignore | 9B |
| 6 | LICENSE | 1.48K |
| 7 | README.md | 12.25K |
| 8 | ctr_brd.brd | 189.56K |
| 9 | ctr_brd.sch | 415.77K |
| 10 | ctr_brd_g.zip | 94.19K |
| 11 | ctr_brd.txt | 13.75K |
| 12 | PnP_ctr_brd_back.txt | 0B |
| 13 | PnP_ctr_brd_front.txt | 957B |
| 14 | drill_1_16.xln | 1.43K |
| 15 | copper_bottom.gbr | 10.70K |
| 16 | copper_top.gbr | 21.24K |
| 17 | gerber_job.gbrjob | 559B |
| 18 | profile.gbr | 6.49K |
| 19 | silkscreen_bottom.gbr | 209B |
| 20 | silkscreen_top.gbr | 248.47K |
| 21 | soldermask_bottom.gbr | 1.66K |
| 22 | soldermask_top.gbr | 7.02K |
| 23 | solderpaste_bottom.gbr | 148B |
| 24 | solderpaste_top.gbr | 8.01K |
| 25 | dc_dc.brd | 75.08K |
| 26 | dc_dc.sch | 186.01K |
| 27 | dc_dc_g.zip | 63.45K |
| 28 | dc_dc.txt | 5.73K |
| 29 | PnP_dc_dc_back.txt | 0B |
| 30 | PnP_dc_dc_front.txt | 676B |
| 31 | drill_1_16.xln | 1.46K |
| 32 | copper_bottom.gbr | 29.93K |
| 33 | copper_top.gbr | 50.18K |
| 34 | gerber_job.gbrjob | 557B |
| 35 | profile.gbr | 219B |
| 36 | silkscreen_bottom.gbr | 44.50K |
| 37 | silkscreen_top.gbr | 60.89K |
| 38 | soldermask_bottom.gbr | 2.27K |
| 39 | soldermask_top.gbr | 8.83K |
| 40 | solderpaste_bottom.gbr | 148B |
| 41 | solderpaste_top.gbr | 17.16K |
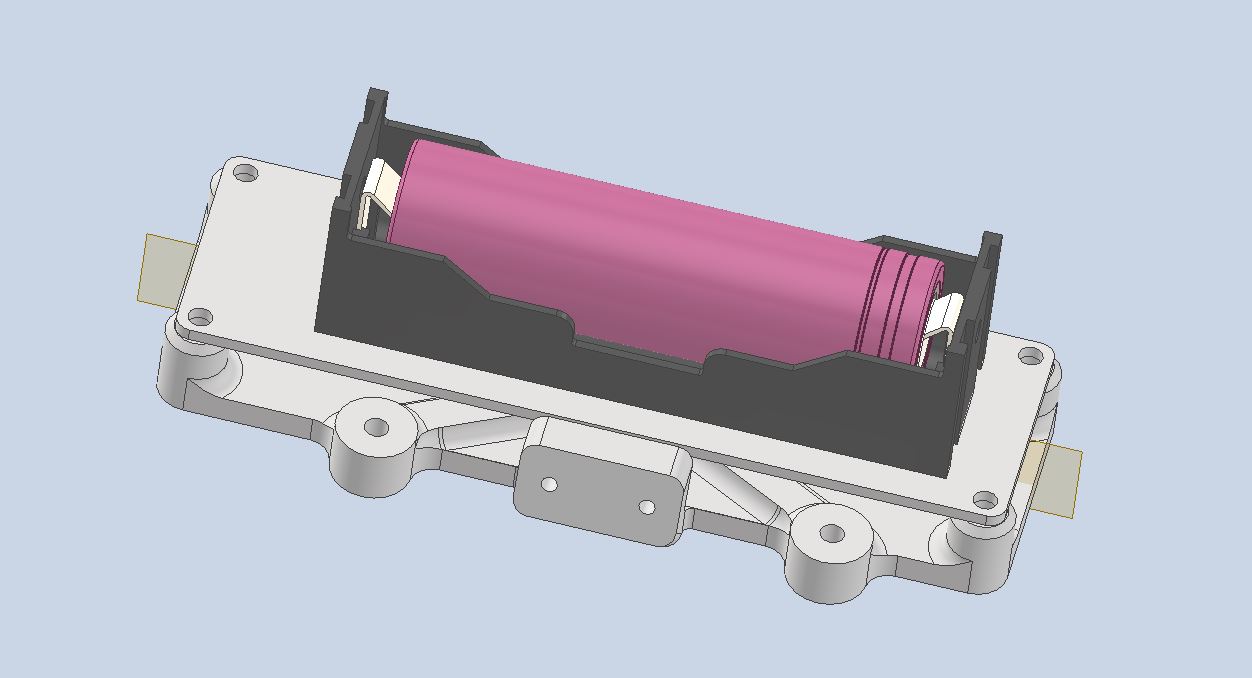
| 42 | 18650_battery_pack.stp | 1.73M |
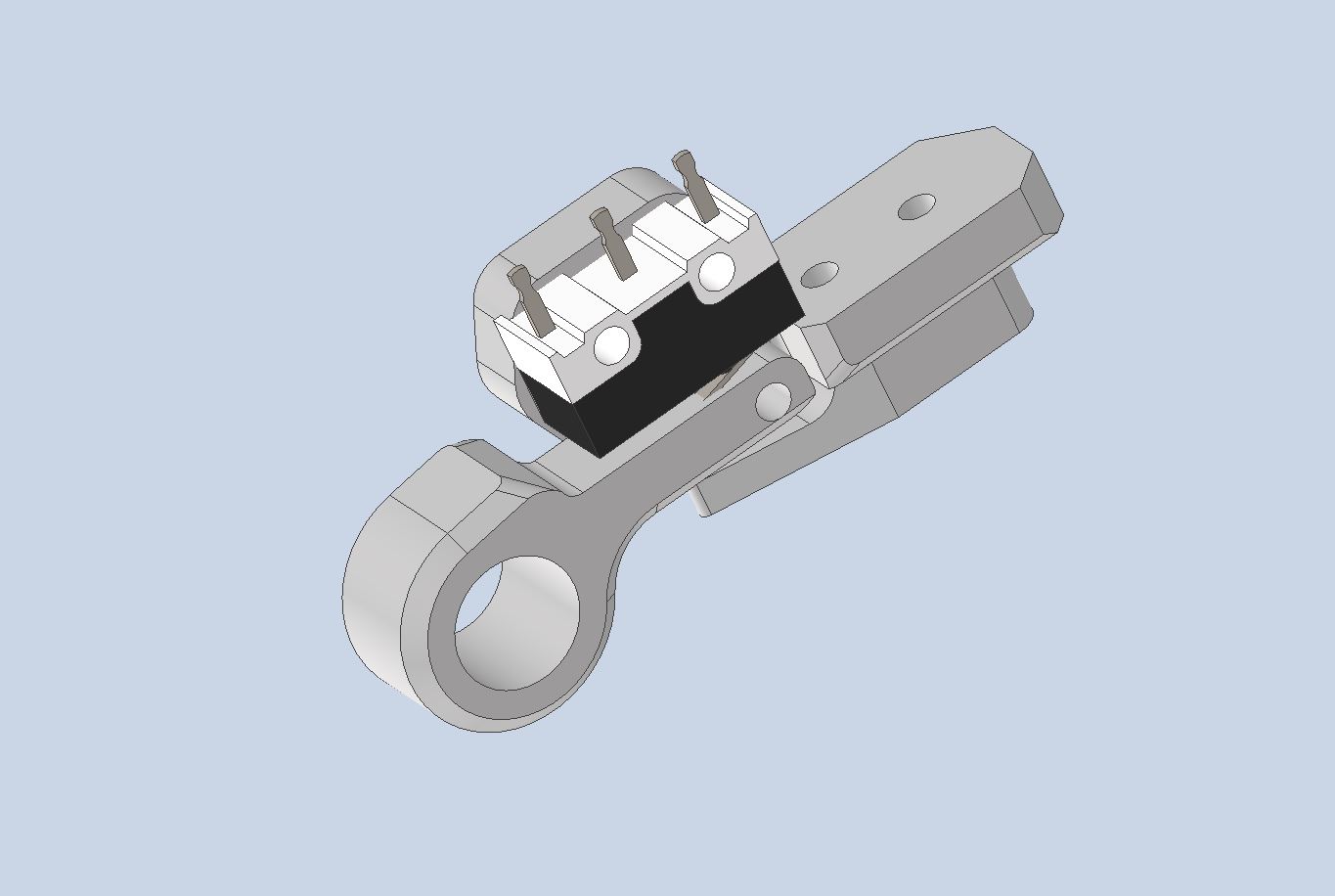
| 43 | feet_sensor.stp | 249.80K |
| 44 | quadruped_bai_servo_assembly.stp | 3.22M |
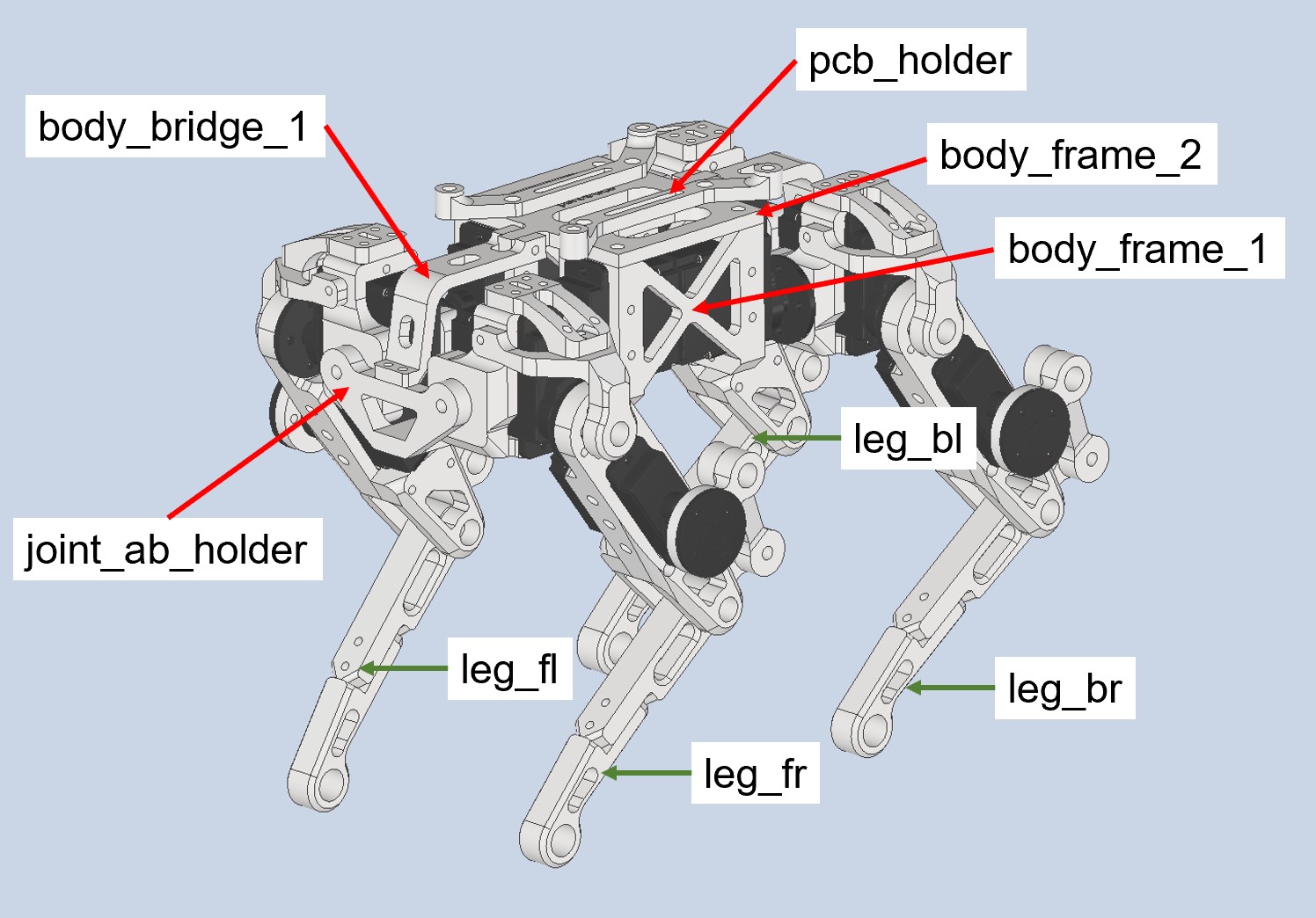
| 45 | body_bridge_1.stl | 105.45K |
| 46 | body_frame_1.stl | 555.45K |
| 47 | body_frame_2.stl | 303.79K |
| 48 | hip_holder_2.stl | 232.02K |
| 49 | hip_holder_2_MIR.stl | 232.02K |
| 50 | hip_joint_holder_1.stl | 156.92K |
| 51 | hip_joint_holder_1_MIR.stl | 156.92K |
| 52 | joint_ab_holder.stl | 120.98K |
| 53 | leg_1.stl | 421.57K |
| 54 | leg_1_2_MIR.stl | 226.25K |
| 55 | leg_1_MIR.stl | 421.57K |
| 56 | leg_2.stl | 164.83K |
| 57 | leg_2_MIR.stl | 164.83K |
| 58 | leg_link-1.stl | 82.70K |
| 59 | leg_link-1_MIR.stl | 82.70K |
| 60 | leg_link_1.stl | 228.01K |
| 61 | leg_link_1_MIR.stl | 228.01K |
| 62 | leg_tip.stl | 136.41K |
| 63 | leg_tip_MIR.stl | 136.41K |
| 64 | pcb_holder.stl | 188.36K |
| 65 | servo_holder_1.stl | 338.66K |
| 66 | servo_holder_1_MIR1.stl | 338.66K |
| 67 | leg_tip_sensor.stl | 114.83K |
| 68 | leg_tip_sensor2.stl | 167.86K |
| 69 | sensor_shelf.stl | 67.46K |
| 70 | batt.JPG | 63.92K |
| 71 | body_ass_1.jpg | 242.27K |
| 72 | controller_1.JPG | 177.21K |
| 73 | dc_dc.JPG | 397.89K |
| 74 | feet_sensor.JPG | 64.62K |
| 75 | leg_ass_1.jpg | 157.17K |
| 76 | m_range_ab.JPG | 162.01K |
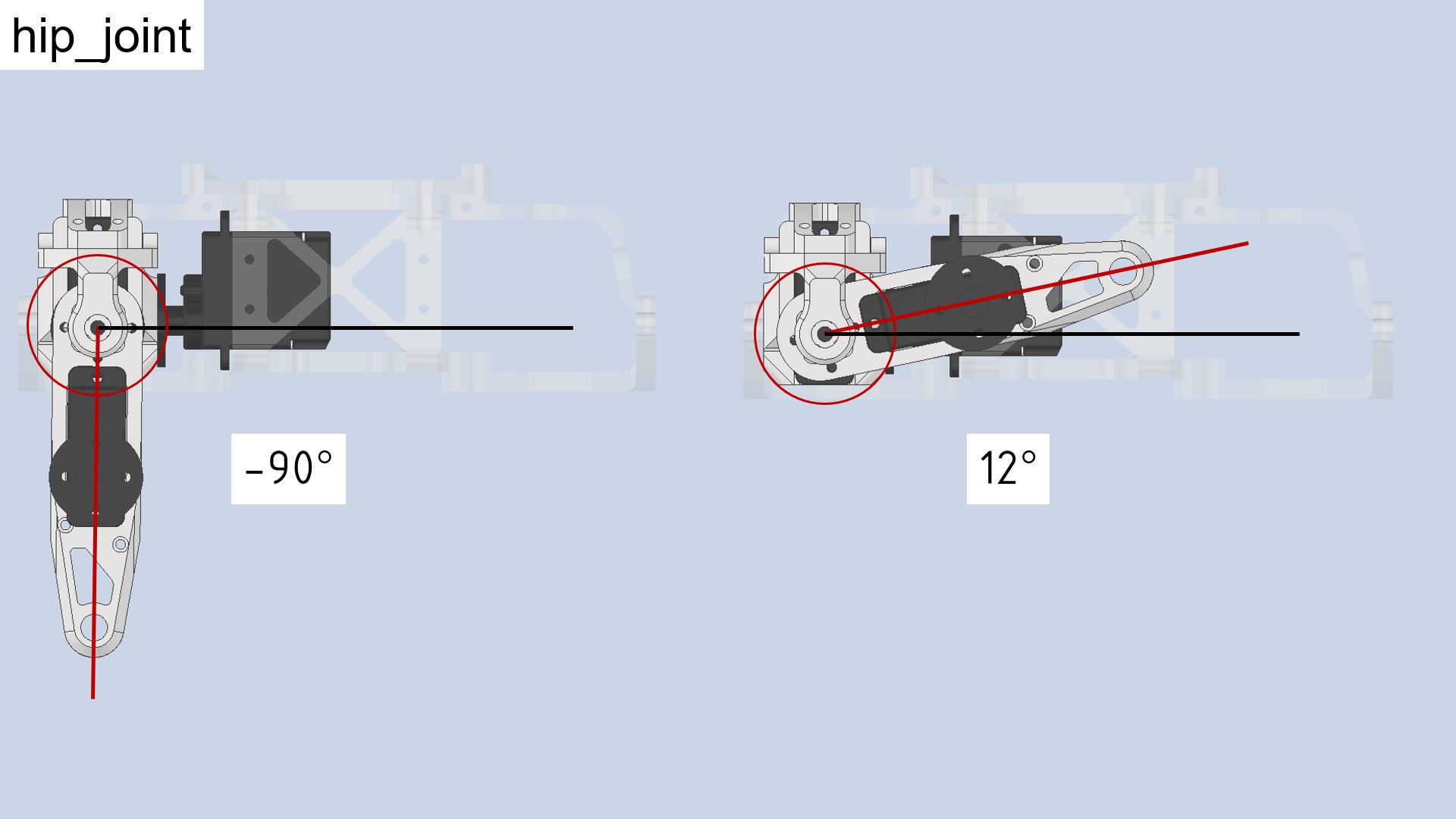
| 77 | m_range_hip.JPG | 103.38K |
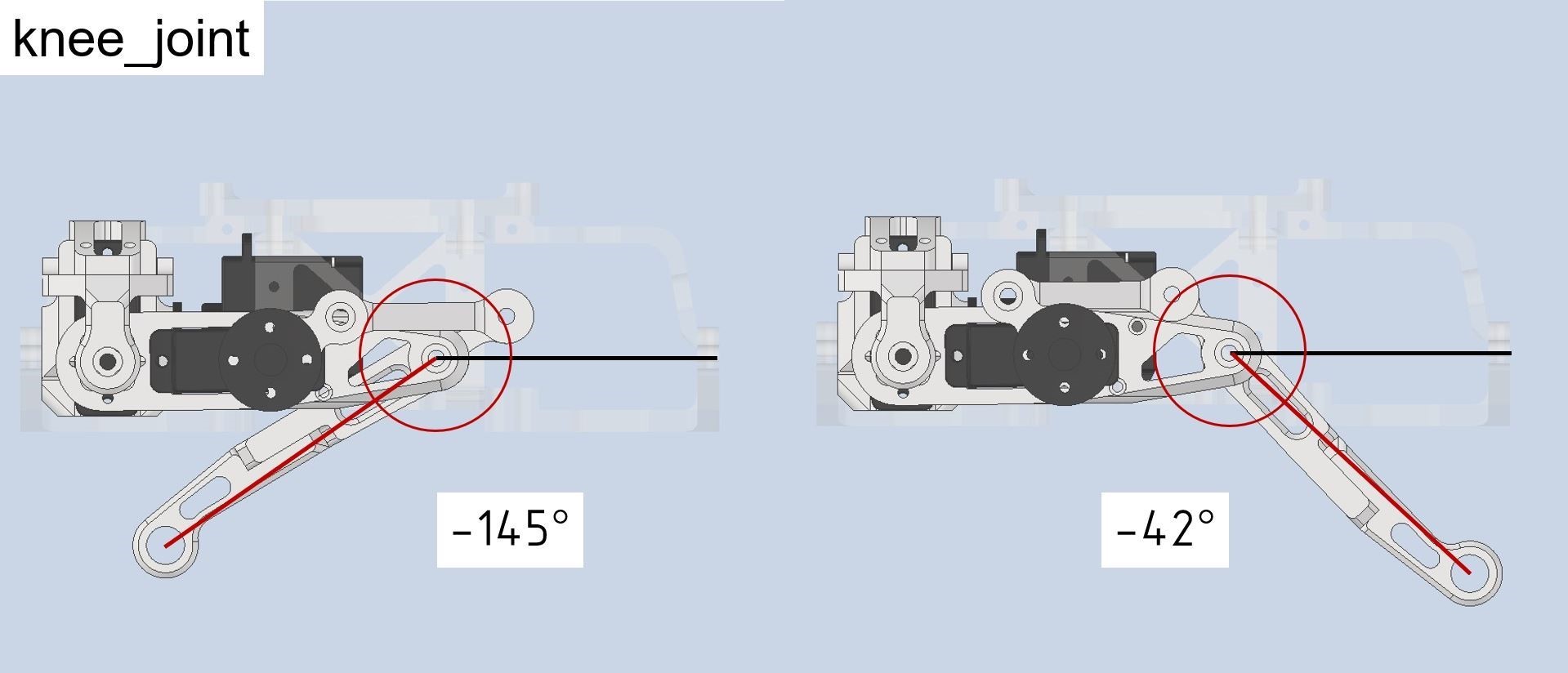
| 78 | m_range_knee.JPG | 157.84K |
| 79 | quad_servo.jpg | 404.67K |
| 80 | quad_servo_cad.jpg | 91.83K |
| 81 | sim.gif | 2.14M |
| 82 | quadruped_bai_servo.ttt | 1.91M |
| 83 | gait_generator.cpp | 8.73K |
| 84 | gait_generator.h | 1.65K |
| 85 | kinematics.cpp | 3.28K |
| 86 | kinematics.h | 1.08K |
| 87 | matrix.cpp | 2.72K |
| 88 | matrix.h | 792B |
| 89 | mpu_sensor.cpp | 4.96K |
| 90 | mpu_sensor.h | 301B |
| 91 | quad_bai_s_ctr.ino | 6.67K |
此图纸下载需要65金币
立即下载
发布者
曾经的天空
创作: 113570
粉丝: 161
加入时间:2022-11-10

模型信息
图纸格式:stl
文件大小:43.16M
所需金币:65
上传时间:2023-08-03 09:25:17
是否可编辑:可修改,包括参数
版本:STEP
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)


