
登录注册
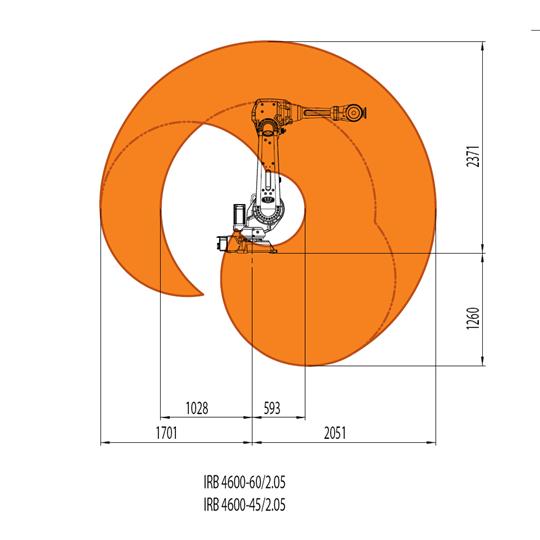
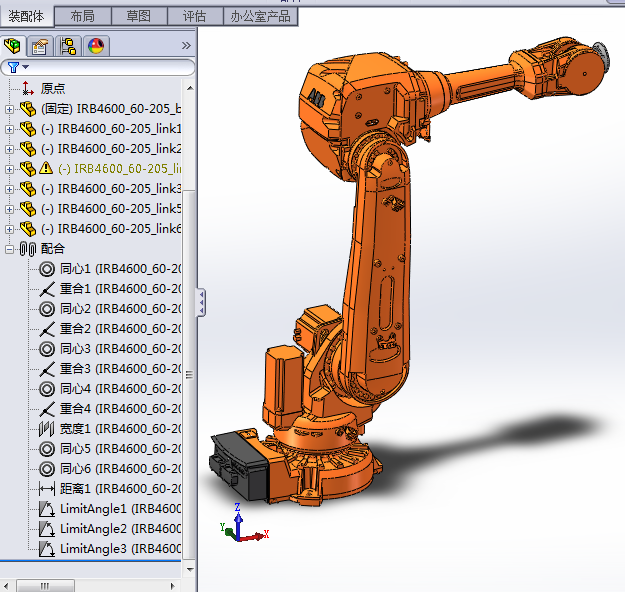
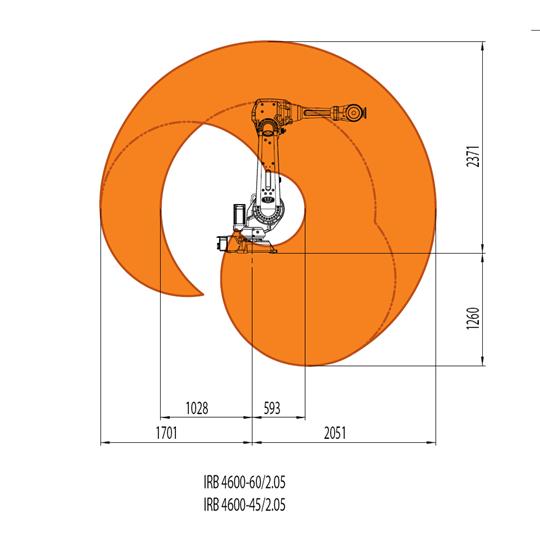
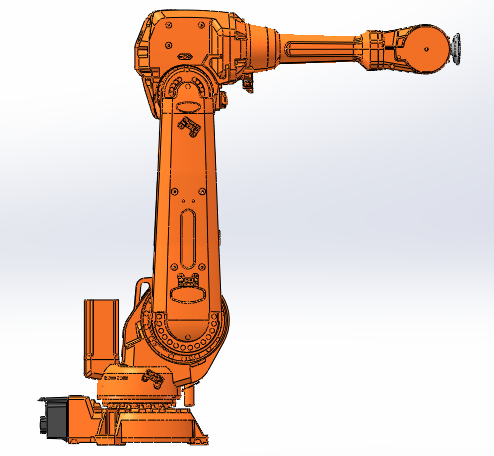
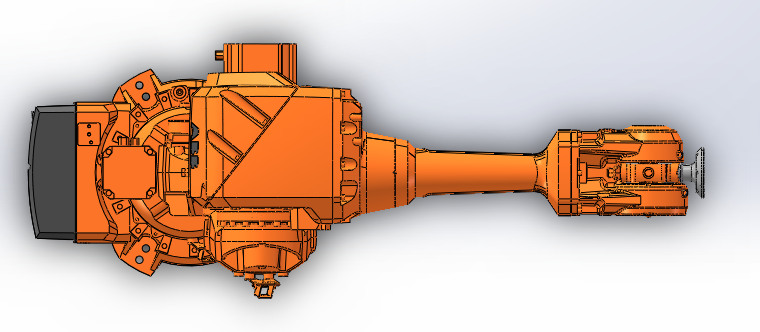
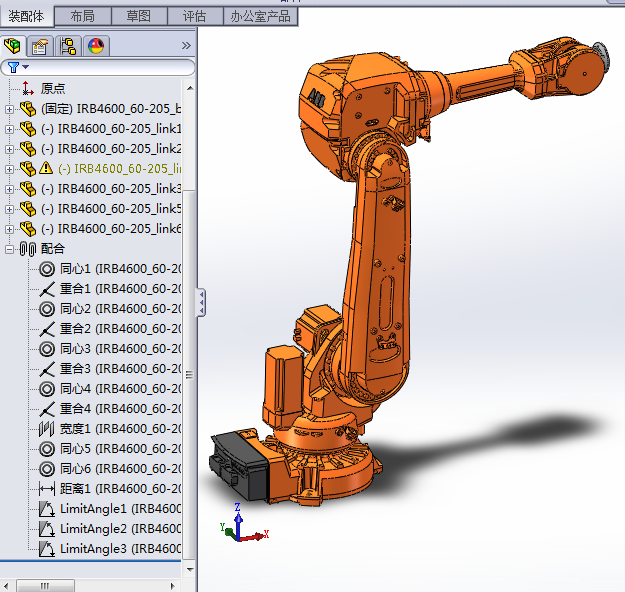
IRB4600-60-2050关节机器人模型(ID:697598)
1.png)
2.png)
3.png)
4.png)
0.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16924229659602.zip | 19.94M |
| 2 | irb-4600.jpg | 21.78K |
| 3 | IRB4600-60-2050.dwg | 940.94K |
| 4 | IRB4600-60-2050.dxf | 4.58M |
| 5 | IRB4600-60-2050.STEP | 30.07M |
| 6 | IRB4600.pdf | 761.52K |
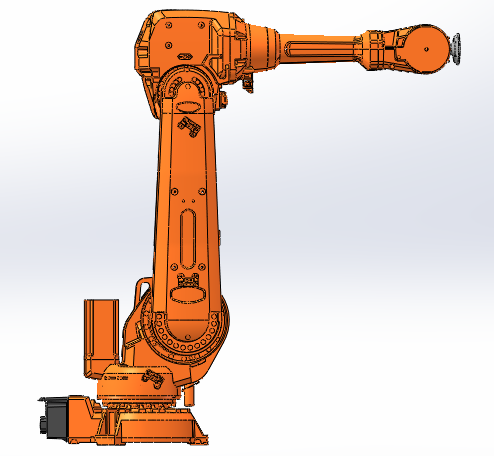
| 7 | 机器人侧视图.png | 81.95K |
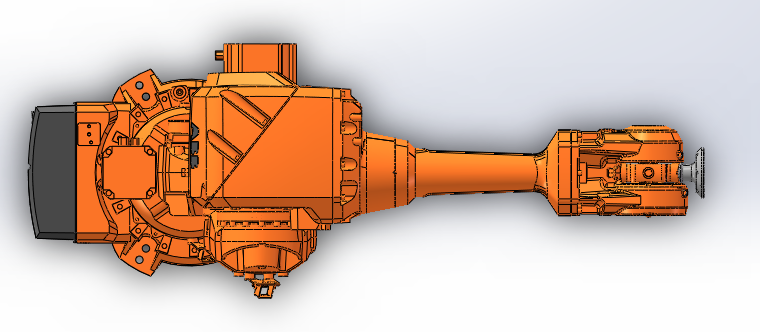
| 8 | 机器人俯瞰视图.png | 136.82K |
| 9 | 机器人全图和特种树配合图.png | 161.43K |
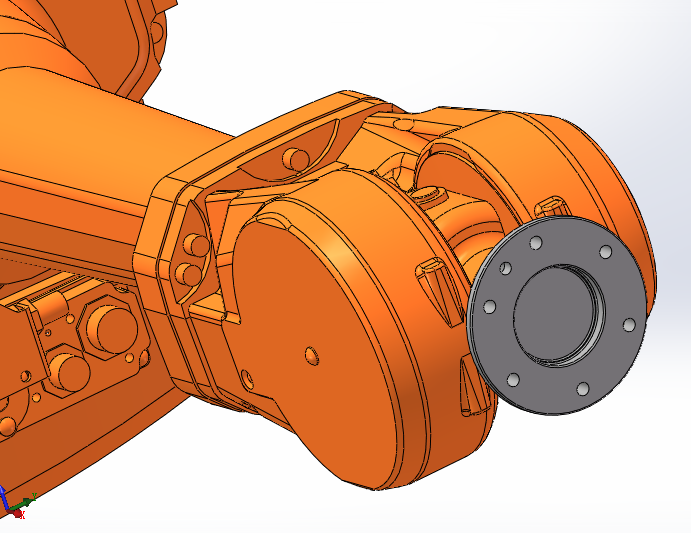
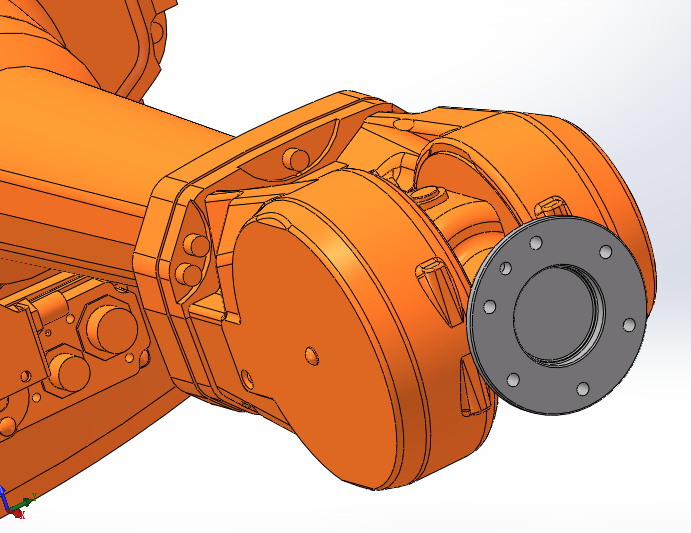
| 10 | 机器人法兰图.png | 166.63K |
| 11 | IRB4600-60-2050.SLDASM | 3.22M |
| 12 | IRB4600_60-205_base.SLDPRT | 1.16M |
| 13 | IRB4600_60-205_link1.SLDPRT | 2.83M |
| 14 | IRB4600_60-205_link2.SLDPRT | 1.25M |
| 15 | IRB4600_60-205_link3.SLDPRT | 1.97M |
| 16 | IRB4600_60-205_link4.SLDPRT | 1.84M |
| 17 | IRB4600_60-205_link5.SLDPRT | 322.50K |
| 18 | IRB4600_60-205_link6.SLDPRT | 257.50K |
| 19 | IRB4600_60-205_link6.STEP | 160.04K |
此图纸下载需要45金币
立即下载
发布者
whqq
创作: 436
粉丝: 14
加入时间:2023-07-02

模型信息
图纸格式:dwg,dxf,step,pdf,sldasm,sldprt
文件大小:20.42M
所需金币:45
上传时间:2023-08-19 13:29:31
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2012
标签
IRB4600
ABB
工业机器人
机械
三维模型
图纸简介
IRB4600的精度为同类产品之最, 其操作速度更快, 废品率
更低, 在扩大产能、提升效率方面, 将起到举足轻重的作用,
尤其适合切削、 点胶、 机加工、 测量、 装配及焊接应用。 此
外, 该机器人采用“ 所编即所得” 的编程机制, 尽可能缩短了
编程时间和周期时间。 在任何应用场合下, 当新程序或新产
品上线时, 上述编程性能均有助于最大限度加快调试过程、
缩短停线时间。
不同版本的sw打开后配合可能会出问题,自己调整重新选择配合的基准即可,已有配合无法保证百分百可用。
文件可以保证完整打开,且提供有中性格式的文件。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多

0.png)
0.png)
0.png)

0.jpg)
0.png)
0.jpg)
0.jpg)
0.jpg)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

