
登录注册
库卡KR10关节机器人弹奏电子琴(ID:698835)


0.png)
1.png)
2.png)
3.png)
4.png)


| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16924990893274.zip | 28.25M |
| 2 | Krc4Schrank.SLDPRT | 3.64M |
| 3 | 库卡kr10机器人弹奏电子琴.IGS | 35.05M |
| 4 | 库卡kr10机器人弹奏电子琴.SLDASM | 3.24M |
| 5 | 库卡kr10机器人弹奏电子琴.STEP | 21.55M |
| 6 | 电子琴.SLDPRT | 1.15M |
| 7 | 系统台面_默认_按焊接_.sldprt | 288.50K |
| 8 | 罩子.SLDPRT | 197.50K |
| 9 | 自定义.txt | 242B |
| 10 | 运动区域图.png | 51.27K |
| 11 | KR10-R1100-sixx_02.jpg | 190.12K |
| 12 | KR10-R1100-sixx_05.jpg | 114.99K |
| 13 | KR10-R1100-sixx_06.jpg | 66.36K |
| 14 | KR10-R1100-sixx_07.jpg | 49.13K |
| 15 | kr10-1100-CR.STEP | 12.23M |
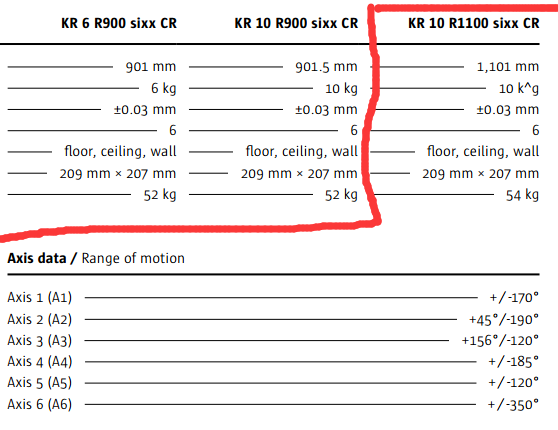
| 16 | kr10-1100参数图.png | 50.88K |
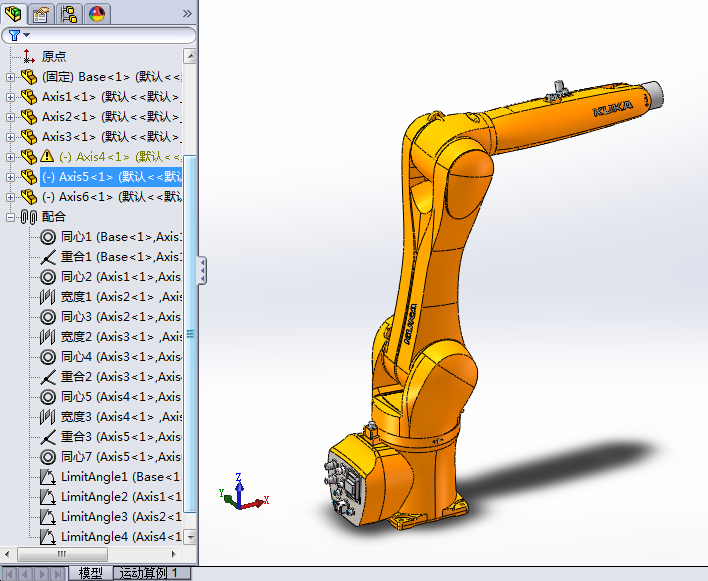
| 17 | kr10全图和特征树配合图.png | 140.87K |
| 18 | KUKA_PB_KLEINROBOTER_en.pdf | 2.88M |
| 19 | 数据表KR_AGILUS_CR英文版.pdf | 399.09K |
| 20 | 机器人介绍.png | 85.90K |
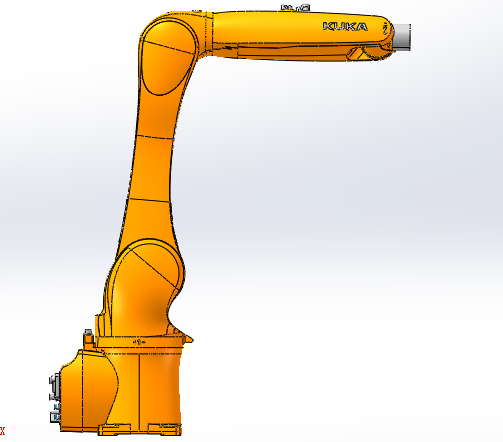
| 21 | 机器人侧面图.png | 57.16K |
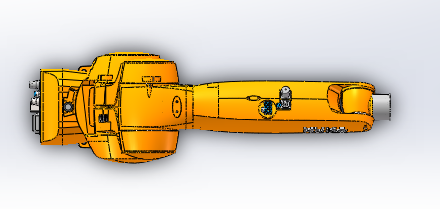
| 22 | 机器人俯视图.png | 49.77K |
| 23 | 机器人四轴气路电路接口图.png | 211.86K |
| 24 | 机器人底座接口图.png | 126.48K |
| 25 | 运动区域图.png | 51.27K |
| 26 | Axis1.SLDPRT | 898.00K |
| 27 | Axis2.SLDPRT | 1.34M |
| 28 | Axis3.SLDPRT | 678.50K |
| 29 | Axis4.SLDPRT | 1.48M |
| 30 | Axis5.SLDPRT | 379.50K |
| 31 | Axis6.SLDPRT | 172.00K |
| 32 | Base.SLDPRT | 1.49M |
| 33 | kr10-1100.SLDASM | 1.58M |
| 34 | 机器人底板.SLDPRT | 148.00K |
| 35 | PBR6X10R_0_.SLDPRT | 302.00K |
| 36 | 抓手本体.SLDPRT | 162.50K |
| 37 | 抓手组件.SLDASM | 298.50K |
| 38 | 相机.SLDPRT | 145.00K |
此图纸下载需要60金币
立即下载
发布者
whqq
创作: 436
粉丝: 12
加入时间:2023-07-02

模型信息
图纸格式:sldprt,igs,sldasm,step,pdf
文件大小:28.93M
所需金币:60
上传时间:2023-08-20 10:38:20
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2016
标签
KR10
库卡
工业机器人
机械
三维模型
图纸简介
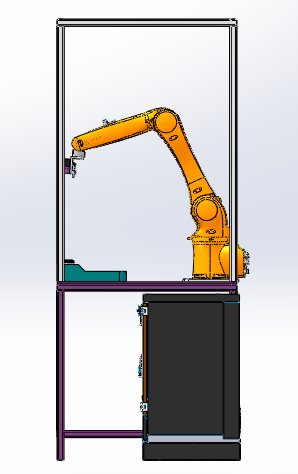
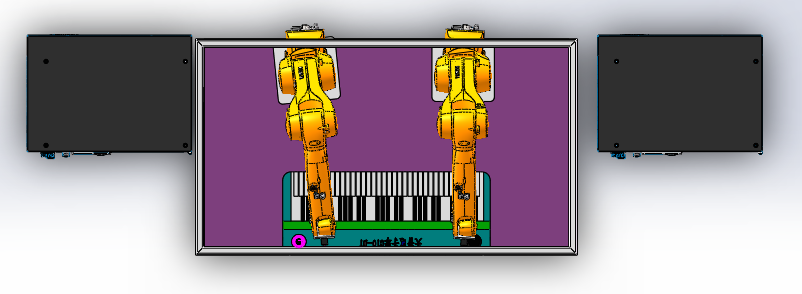
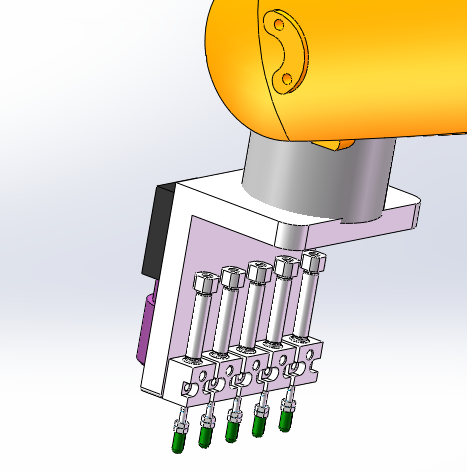
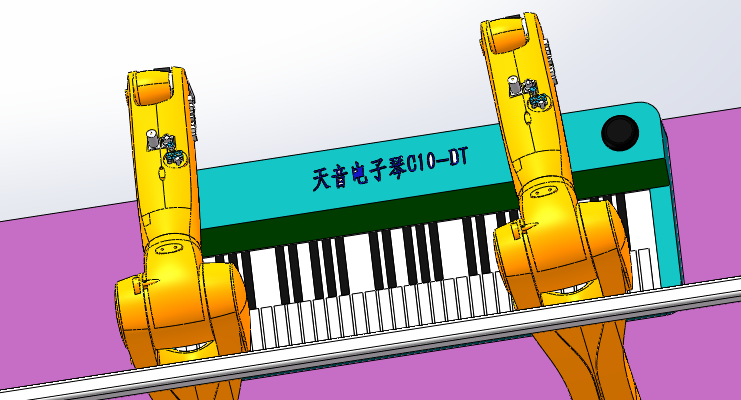
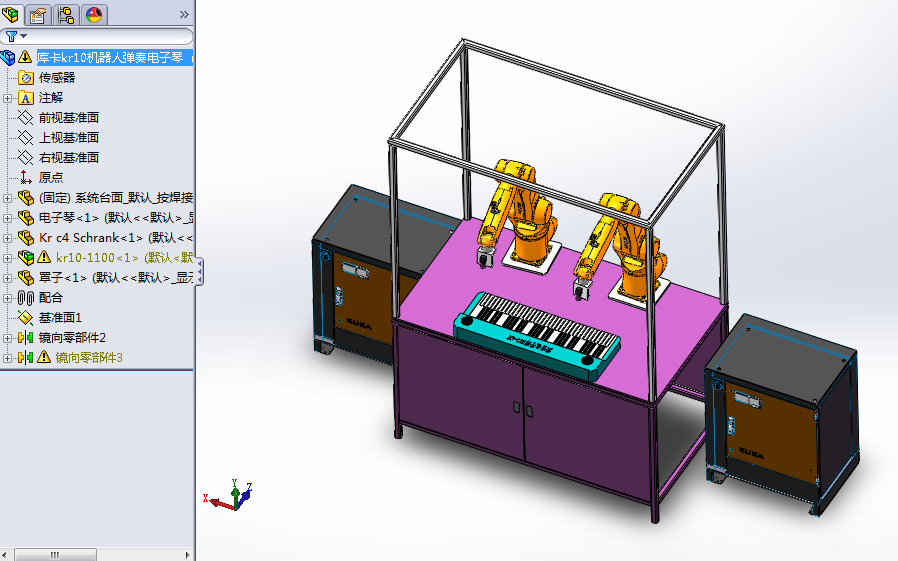
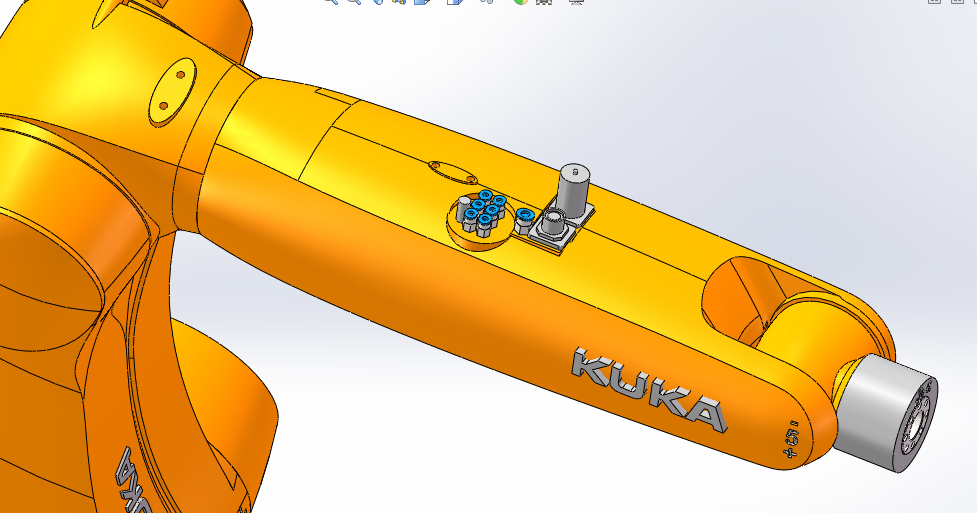
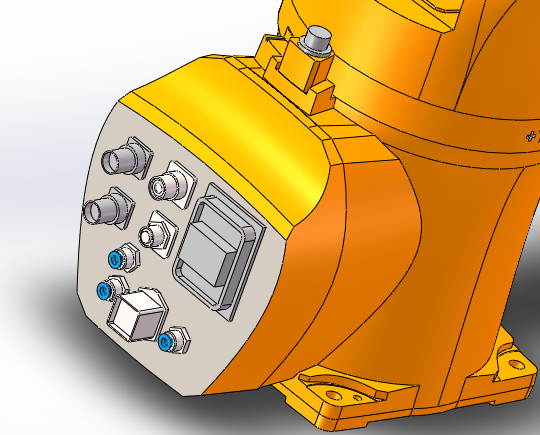
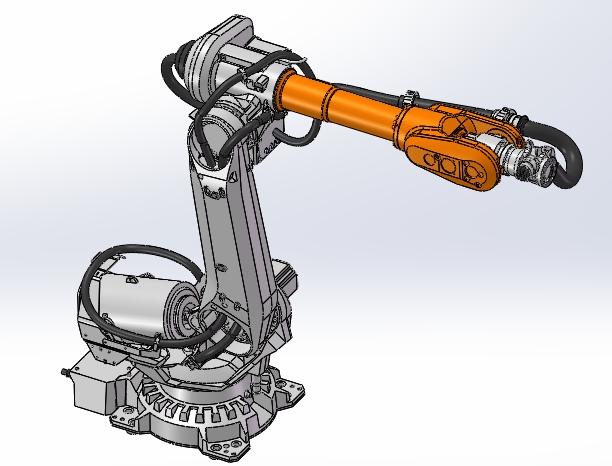
本工作站是库卡kr10机器人弹奏电子琴的应用,多应用于科技馆展示或者青少年机器人应用教育方面。每一台库卡机器人手上带有一个五指的机械手,机械手有五个笔行气缸能够模仿人类的五根手指,两台机器人模仿人类的两双手十根手指,从而达到自动演奏电子琴的目的。另外机器人抓手上带有视觉系统,能够准确的捕捉到目的琴键,从而变误动作。当然曲谱的输入是一项挑战,希望能够有比较好的编译器将乐谱编译成机器人能否识别的代码。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多





0.png)
0.png)
0.png)
0.png)
0.png)

0.png)
0.png)

