
登录注册
ABB irb4400_60-1960六轴关节机器人(ID:700031)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16926239595422.zip | 4.72M |
| 2 | DWG图.png | 8.82K |
| 3 | IRB4400_2009_C.pdf | 265.09K |
| 4 | IRB4400_60_m2000_rev1_01.IGS | 5.81M |
| 5 | IRB4400_60_m2000_rev1_01.STEP | 2.48M |
| 6 | IRB4400二维图.dwg | 779.01K |
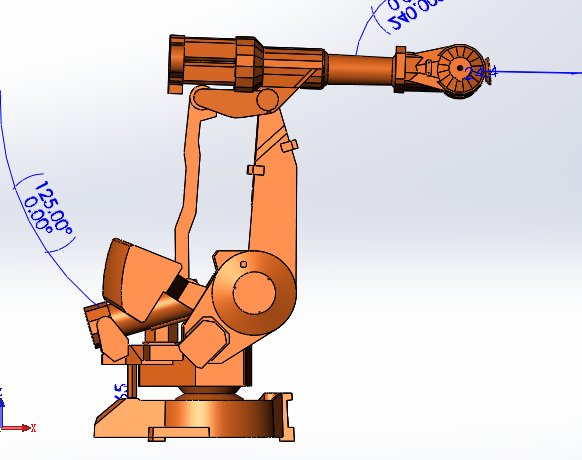
| 7 | irb4400侧面图.png | 73.42K |
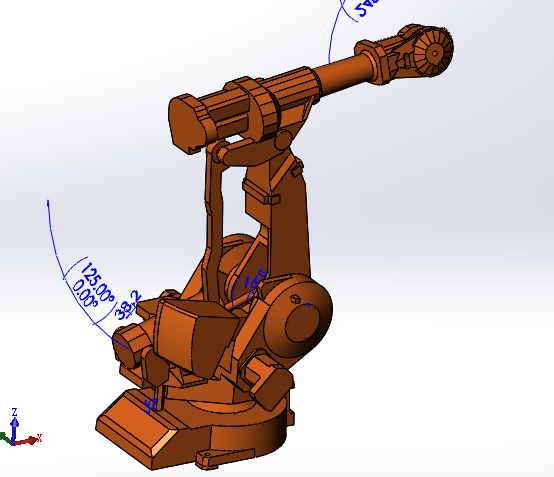
| 8 | irb4400机器人图.png | 80.28K |
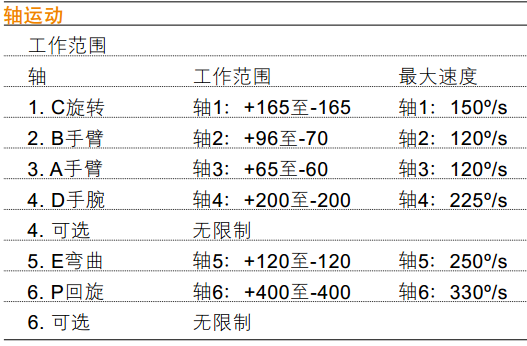
| 9 | irb440轴运动角度和速度.png | 63.33K |
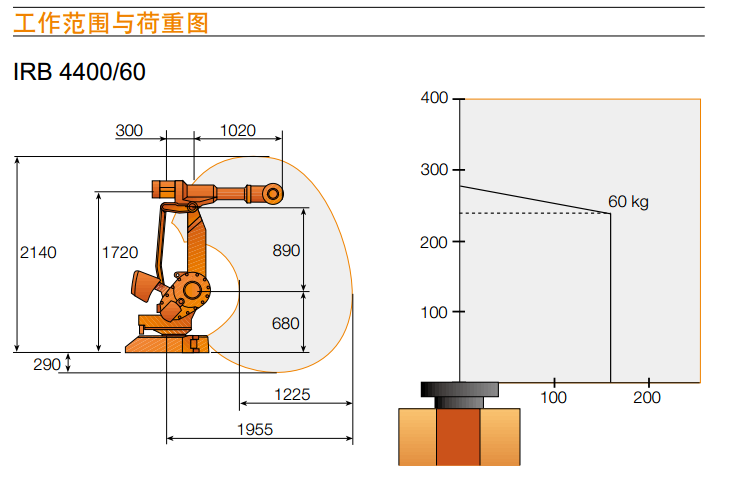
| 10 | irb440运动范围和荷重图.png | 56.90K |
| 11 | 内容图.png | 86.99K |
| 12 | 机器人后测图.png | 118.13K |
| 13 | 机器人法兰图.png | 144.54K |
| 14 | 说明.txt | 623B |
| 15 | IRB4400_60_m2000_rev1_01-1.SLDPRT | 118.14K |
| 16 | IRB4400_60_m2000_rev1_01-10.sldprt | 275.58K |
| 17 | IRB4400_60_m2000_rev1_01-11.SLDPRT | 62.37K |
| 18 | IRB4400_60_m2000_rev1_01-12.SLDPRT | 112.74K |
| 19 | IRB4400_60_m2000_rev1_01-13.SLDPRT | 51.63K |
| 20 | IRB4400_60_m2000_rev1_01-14.SLDPRT | 62.72K |
| 21 | IRB4400_60_m2000_rev1_01-15.SLDPRT | 62.50K |
| 22 | IRB4400_60_m2000_rev1_01-16.sldprt | 37.00K |
| 23 | IRB4400_60_m2000_rev1_01-17.sldprt | 37.50K |
| 24 | IRB4400_60_m2000_rev1_01-2.sldprt | 170.63K |
| 25 | IRB4400_60_m2000_rev1_01-3.SLDPRT | 95.09K |
| 26 | IRB4400_60_m2000_rev1_01-4.SLDPRT | 78.03K |
| 27 | IRB4400_60_m2000_rev1_01-5.SLDPRT | 37.34K |
| 28 | IRB4400_60_m2000_rev1_01-6.SLDPRT | 32.46K |
| 29 | IRB4400_60_m2000_rev1_01-7.SLDPRT | 36.95K |
| 30 | IRB4400_60_m2000_rev1_01-8.sldprt | 258.22K |
| 31 | IRB4400_60_m2000_rev1_01-9.SLDPRT | 61.52K |
| 32 | IRB4400_60_m2000_rev1_01.SLDASM | 317.26K |
| 33 | IRB4400_60_m2000_rev1_01.STEP | 2.48M |
此图纸下载需要45金币
立即下载
发布者
whqq
创作: 436
粉丝: 12
加入时间:2023-07-02

模型信息
图纸格式:pdf,igs,step,dwg,sldprt,sldasm
文件大小:4.84M
所需金币:45
上传时间:2023-08-21 21:19:22
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2016
标签
ABB
irb4400
机器人
机械
三维模型
图纸简介
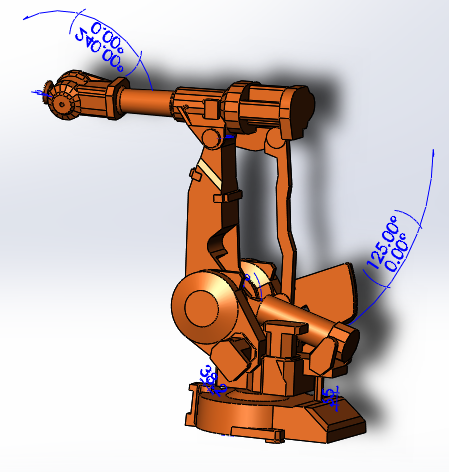
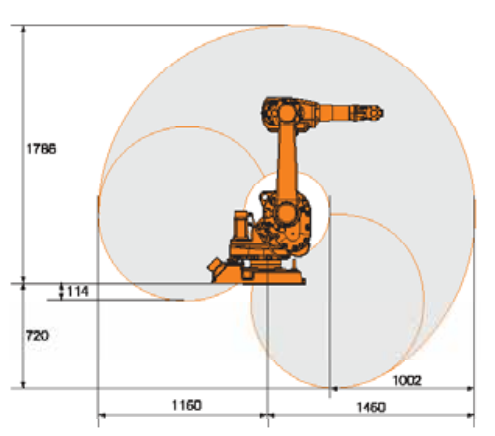
IRB 4400工业机器人机身紧凑、 运行速度极快, 适用于
大中型重物搬运。 其独有的多功能设计广泛适应各种制造
业需求。 该型机器人在高速运行状态下的荷重能力达60
kg, 通常一次可搬运两件物料。 此外, 该机器人结构坚
固, 具有良好的平衡性, 并采用TrueMoveTM专利技术,
在整个工作范围内均能保持平稳而快速的运动, 从而确保
切削等应用领域的高质量产品制造。
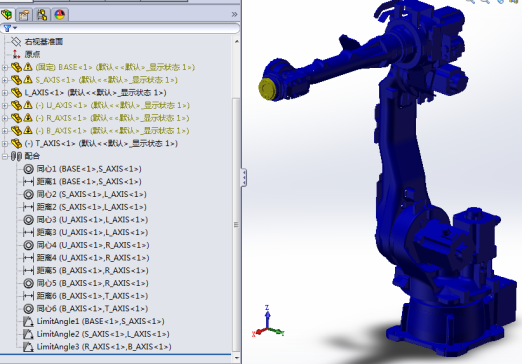
不同版本的sw打开后配合可能会出问题,自己调整重新选择配合的基准即可,已有配合无法保证百分百可用。
文件可以保证完整打开,且提供有中性格式的文件。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)

0.png)
0.jpg)
0.png)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

