
登录注册
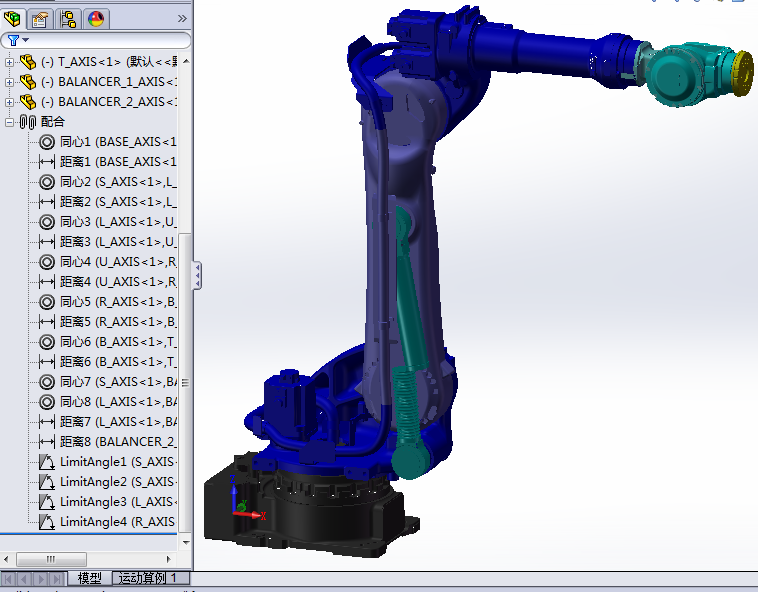
安川motomanMS210关节点焊机器人模型(ID:704966)
0.png)
3.png)
2.png)
1.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16930447361723.zip | 55.98M |
| 2 | MS210.dwg | 829.59K |
| 3 | MS210.dxf | 3.83M |
| 4 | MS210.IGS | 71.85M |
| 5 | MS210.STEP | 62.43M |
| 6 | MS210_D_05.2017.pdf | 919.48K |
| 7 | MS210侧面图.png | 60.43K |
| 8 | ms210俯瞰图.png | 52.39K |
| 9 | ms210法兰图.png | 127.50K |
| 10 | MS210运动区域图.png | 91.73K |
| 11 | 机器人MS210全图和特征配合图.png | 147.51K |
| 12 | BALANCER_1_AXIS.sldprt | 203.50K |
| 13 | BALANCER_2_AXIS.sldprt | 178.00K |
| 14 | BASE_AXIS.sldprt | 2.06M |
| 15 | B_AXIS.sldprt | 2.72M |
| 16 | L_AXIS.sldprt | 2.06M |
| 17 | MS210.SLDASM | 9.34M |
| 18 | R_AXIS.sldprt | 1.45M |
| 19 | S_AXIS.sldprt | 4.42M |
| 20 | T_AXIS.sldprt | 79.50K |
| 21 | U_AXIS.sldprt | 4.43M |
此图纸下载需要45金币
立即下载
发布者
whqq
创作: 436
粉丝: 14
加入时间:2023-07-02

模型信息
图纸格式:dwg,dxf,igs,step,pdf,sldprt,sldasm
文件大小:57.32M
所需金币:45
上传时间:2023-08-26 18:12:31
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2016
标签
MS210
工业机器人
点焊
motoman
安川
图纸简介
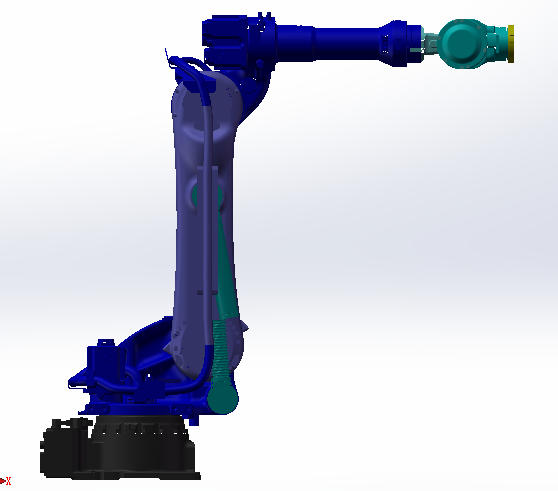
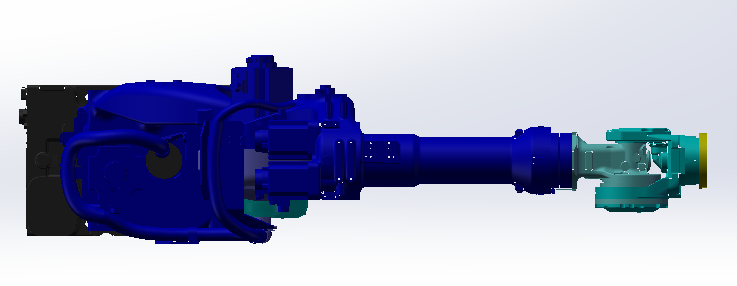
MS210机器人能够实行全轴动作高速化,缩短循环时间实现生产效率的提高。机器人扩大了搭载点焊枪时
R,B,T轴的动作范囲。大大提高了一台机器人打点数,提高生产效率。与以前机器人相比,机器人的底座面积减小。
机器人模型关节已经完成圆配合,角度定义和约束,可以载solidwirks中手动拖动各轴运动。
不同版本的sw打开后配合可能会出问题,自己调整重新选择配合的基准即可,已有配合无法保证百分百可用。
文件可以保证完整打开,且提供有中性格式的文件。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)




猜你喜欢
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)

0.png)
0.png)

0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)

