
登录注册
机器人夹手(ID:723247)
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16947797039014.zip | 183.99K |
| 2 | 2b2e2753f989cefea0bab9f921b90e2.png | 23.26K |
| 3 | 514aecb8859c611727448ab6cb576f5.png | 57.32K |
| 4 | b2abce0ee53d8c17e55dafde3a35302.png | 25.15K |
| 5 | d98868b05be455486e74d1ddd359b8d.png | 32.43K |
| 6 | 机器人工具手---夹成品20230301.STEP | 362.58K |
此图纸下载需要50金币
立即下载
发布者
仙人掌设计
创作: 334
粉丝: 22
加入时间:2022-11-04

模型信息
图纸ID:723247
图纸格式:step
文件大小:188.41KB
所需金币:50
上传时间:2023-09-15 20:08:24
是否可编辑:可修改,包括参数
软件版本:STEP
标签
图纸简介
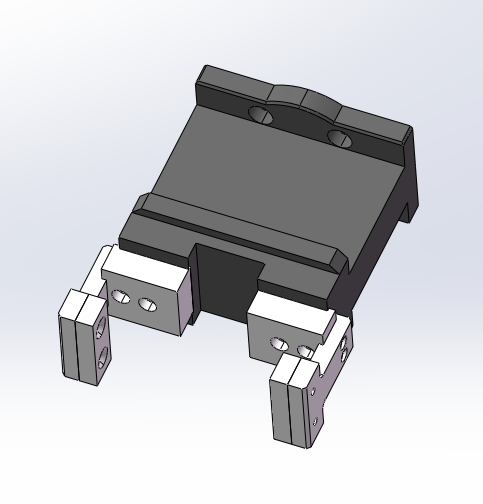
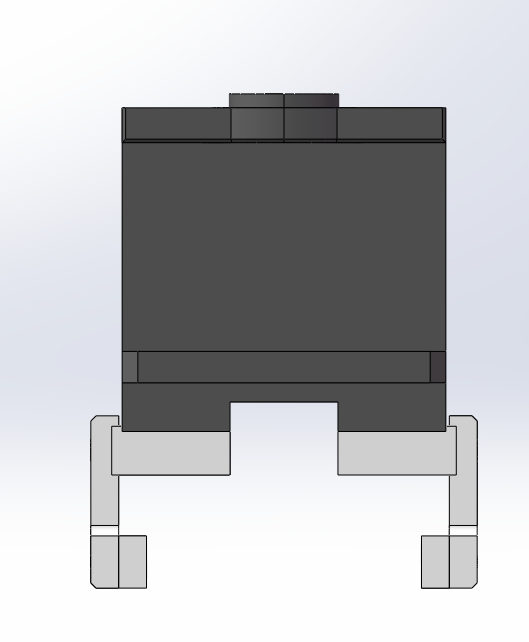
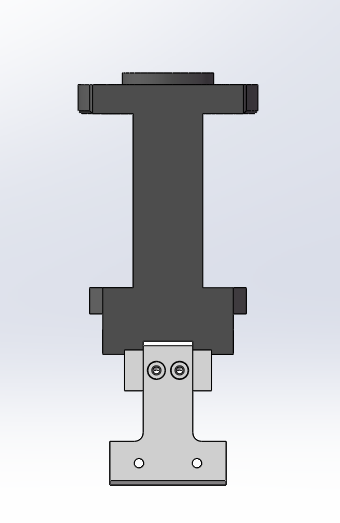
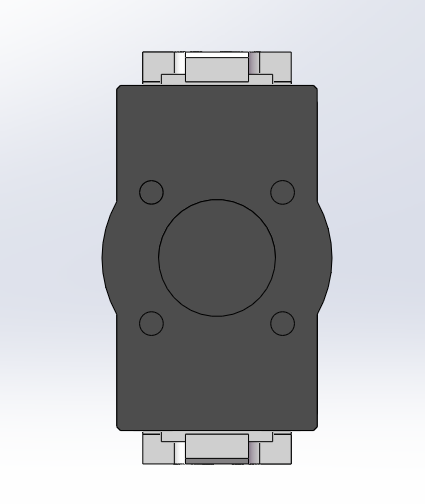
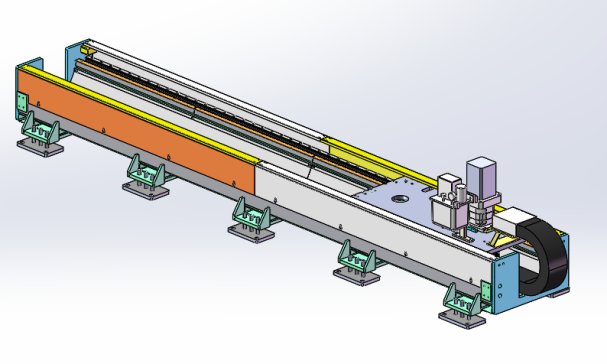
机器人手装置,该装置通过电机带动齿轮齿条结构,通过连杆驱动缸驱动连杆锁住相邻的指节,能准确抓取不同形状和尺寸的物体,特别是对于质量较大物体或者形状不规则物体有很好的防漏效果无需复杂的传感和控制系统;抓取范围大、结构简单、抓取过程中兼具刚性和柔性。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

