
登录注册
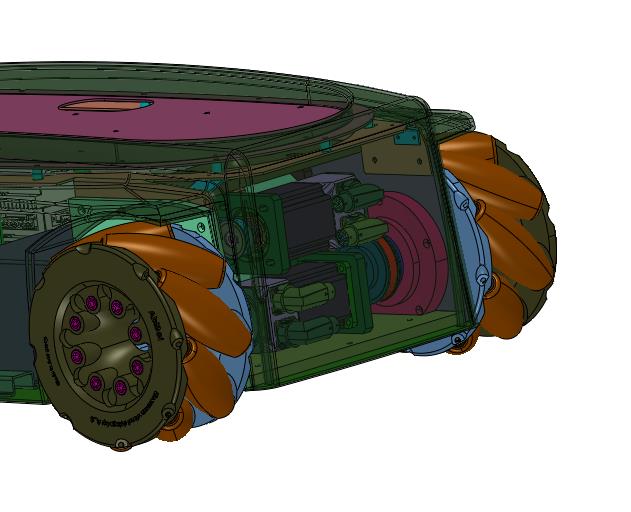
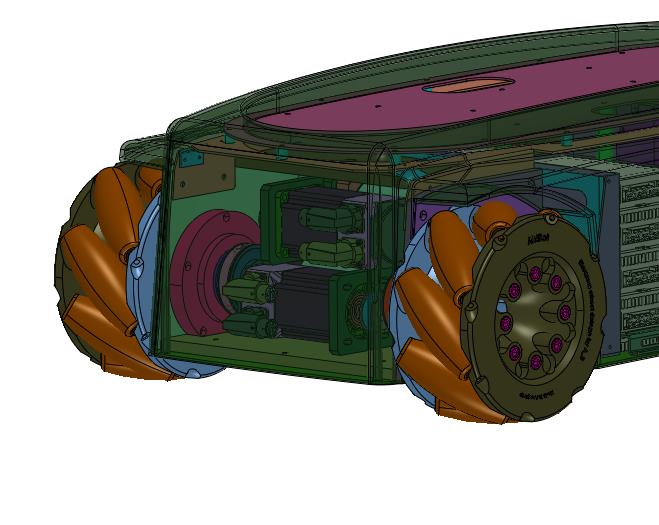
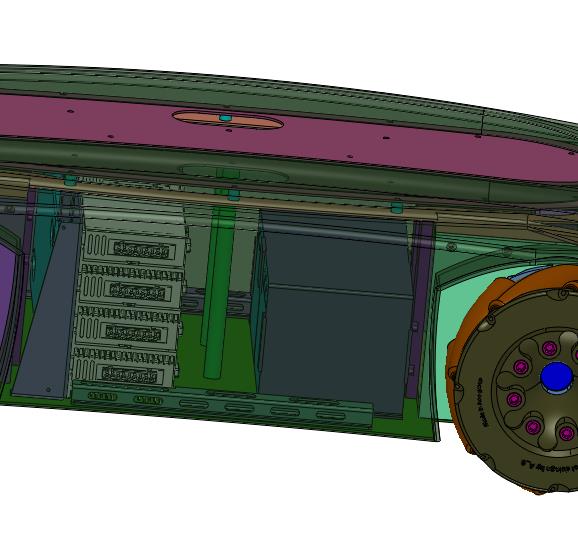
四轮差动麦克纳姆轮全向运动学轮式机器人(ID:726139)
0.png)
1.png)
2.png)
3.png)
4.png)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16952071975005.zip | 9.10M |
| 2 | 360截图20230906222500193.jpg | 34.80K |
| 3 | 360截图20230906222508552.jpg | 43.74K |
| 4 | 360截图20230906222512527.jpg | 38.20K |
| 5 | 360截图20230906222515792.jpg | 39.98K |
| 6 | 四轮差动麦克纳姆轮全向运动学轮式机器人.stp | 40.91M |
此图纸下载需要120金币
立即下载
发布者
落后的皮皮虾
创作: 57056
粉丝: 370
加入时间:2022-09-02

模型信息
图纸格式:stp
文件大小:9.32M
所需金币:120
上传时间:2023-09-20 18:53:26
是否可编辑:可修改,不包括参数
版本:STEP
标签
四轮差动
麦克纳姆轮
全向
运动学
机器人
图纸简介
四轮差动麦克纳姆轮全向运动学轮式机器人:由一系列的辊子组成,每个辊子都可以独立旋转。这种轮子的全方位运动能力使得机器人可以在各种复杂的环境中自由移动,包括狭窄的空间、坡道等。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0_0_364.png)
![CDL3法兰型[CDL3-10]](https://html.lazystones.com/lazy/2134563/image/92447e0b-8d17-4389-940c-99e6d4481eb5原图(主)0.png)
0_0_364.png)

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0.png)

