
登录注册
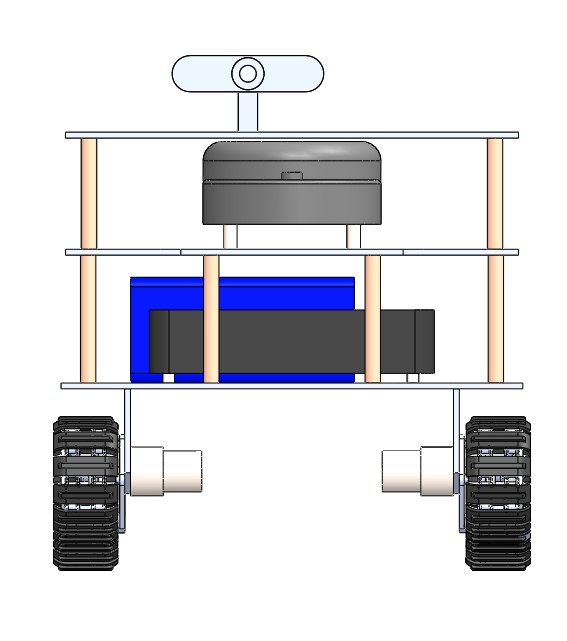
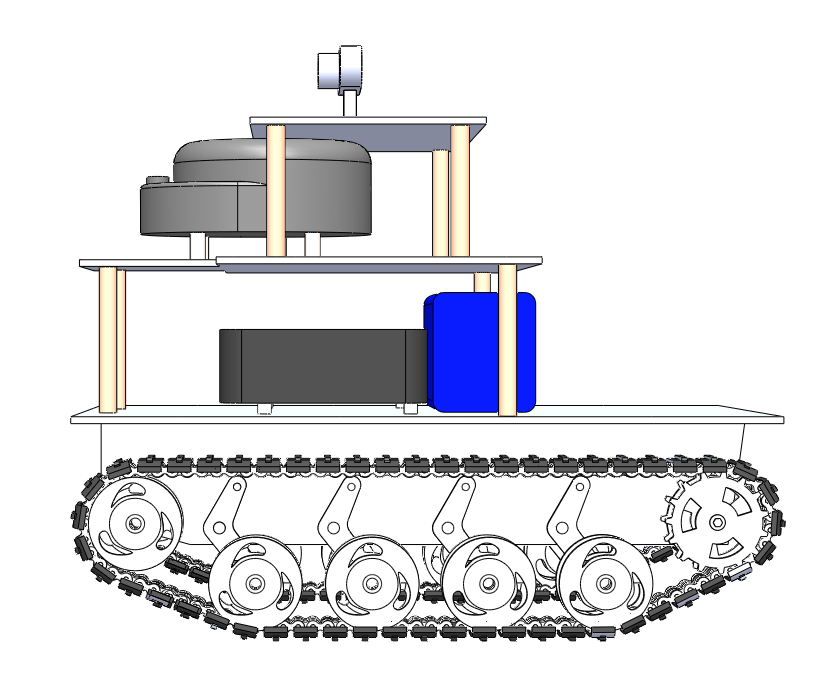
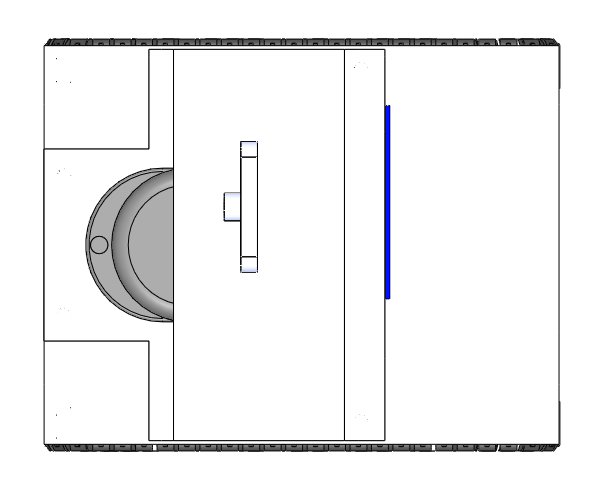
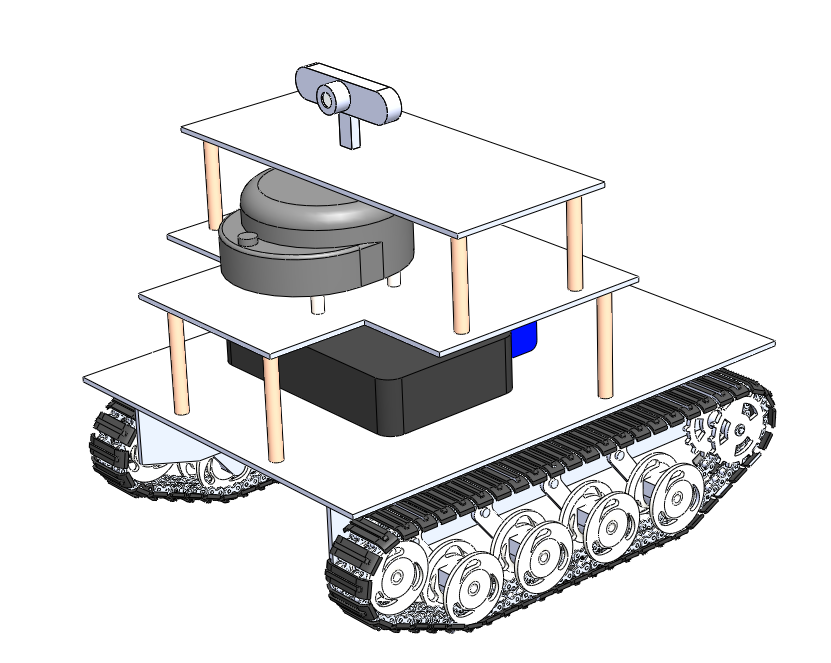
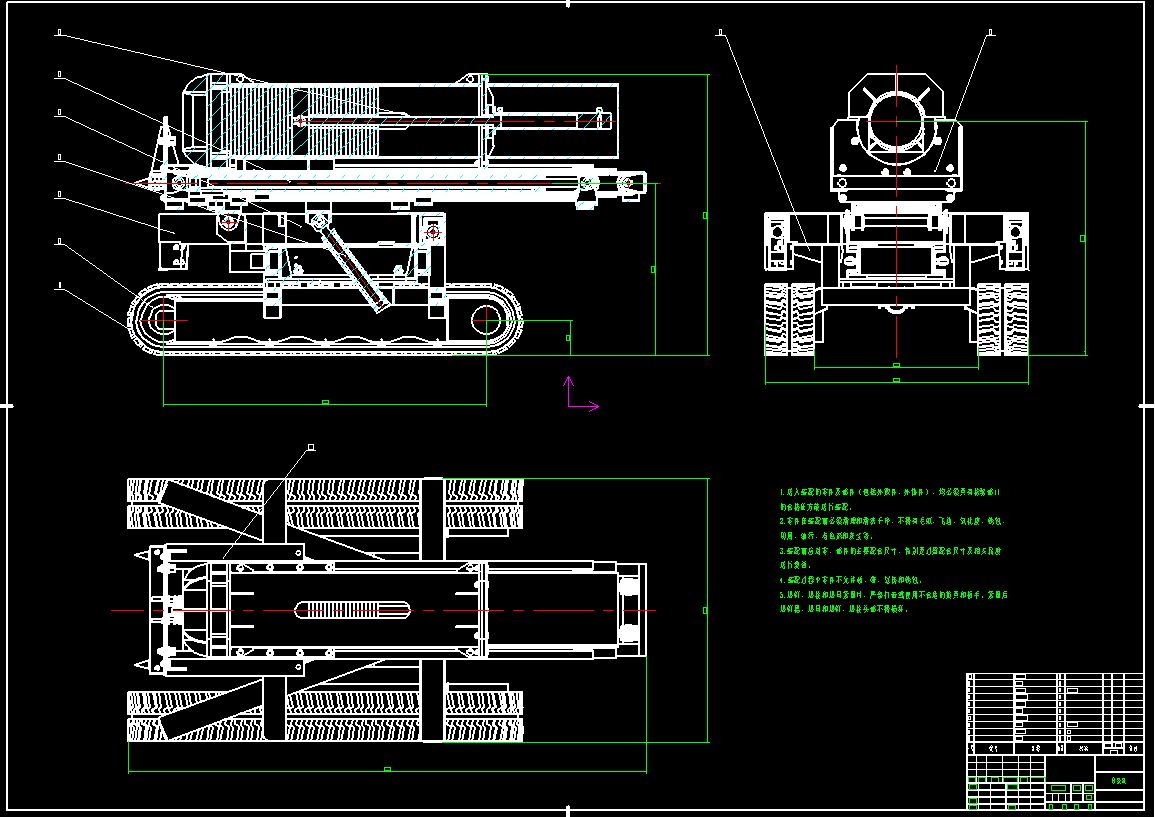
智能摄像履带机器人(ID:741444)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1697460717522.zip | 34.38M |
| 2 | 2c96c5ab06443cec58888e5b032838c.png | 39.79K |
| 3 | 56f7c67ffc1145377de8380cb863f8e.png | 99.24K |
| 4 | 5f32a41aa533b7d9db5da72cabde288.png | 25.35K |
| 5 | 6d5658bdbc9fc403de5fefcfca116c1.png | 184.35K |
| 6 | 1.sldprt | 111.39K |
| 7 | 前轮.SLDPRT | 93.93K |
| 8 | 履带组件.SLDPRT | 12.45M |
| 9 | 总装.SLDASM | 5.43M |
| 10 | 手臂.SLDPRT | 43.41K |
| 11 | 手臂座.sldprt | 79.43K |
| 12 | 摄像头1.SLDPRT | 75.54K |
| 13 | 机器人小车.SLDASM | 5.54M |
| 14 | 机器人小车.SLDPRT | 12.11M |
| 15 | 组件1.SLDASM | 81.88K |
| 16 | 舵机1.SLDPRT | 130.61K |
| 17 | 驱动电机.sldprt | 36.34K |
此图纸下载需要80金币
立即下载
发布者
仙人掌设计
创作: 334
粉丝: 21
加入时间:2022-11-04

模型信息
图纸格式:sldprt,sldasm
文件大小:35.2M
所需金币:80
上传时间:2023-10-16 20:53:00
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2017
标签
图纸简介
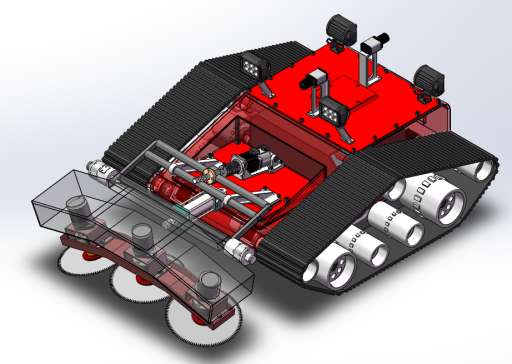
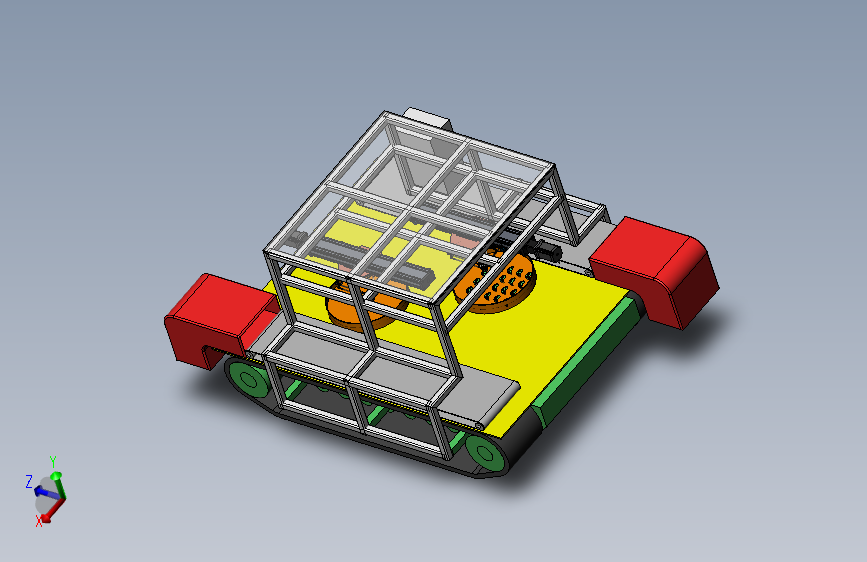
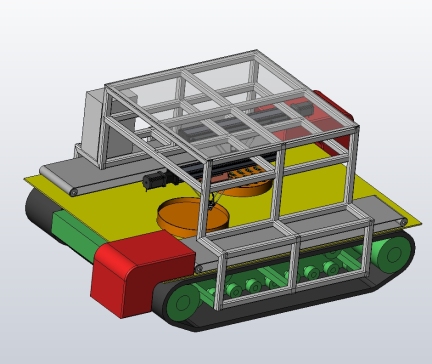
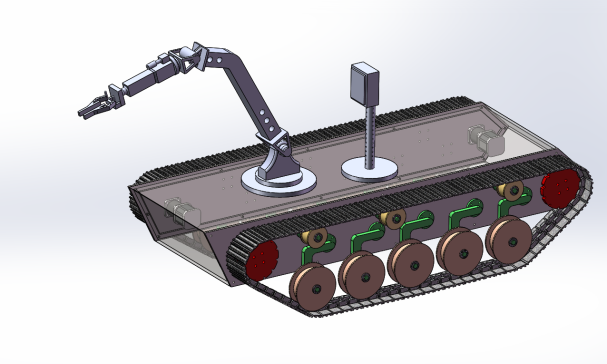
此模型是由SOLIDWORKS2017建模而成。该设备可用于野外复杂地形环境下的移动机器人研究,包括3D定位导航、复杂3D环境建模、多传感器信息融合、视觉里程计、运动学/动力学分析、动态目标识别与跟踪、路径规划与运动控制等领域的研究。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多


0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0_0_364.png)
0.png)
0_0_364.png)
0.png)
0_0_364.png)
0.png)
0_0_364.png)

