
登录注册
太阳能封头机器人焊接工作站(ID:764068)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16985910823906.zip | 10.81M |
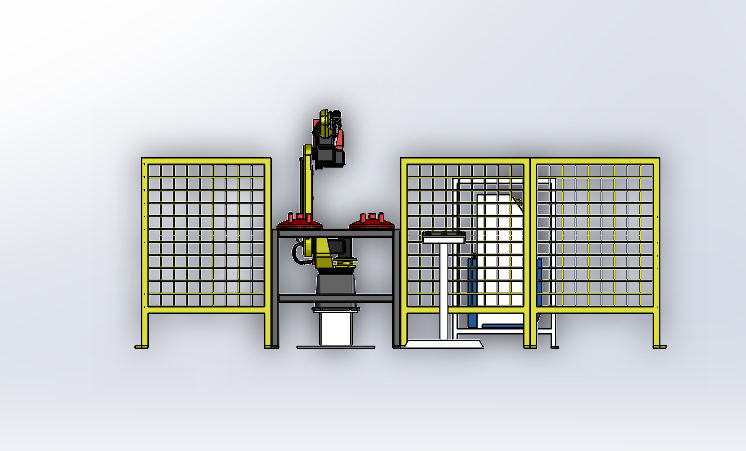
| 2 | 主视图.png | 78.65K |
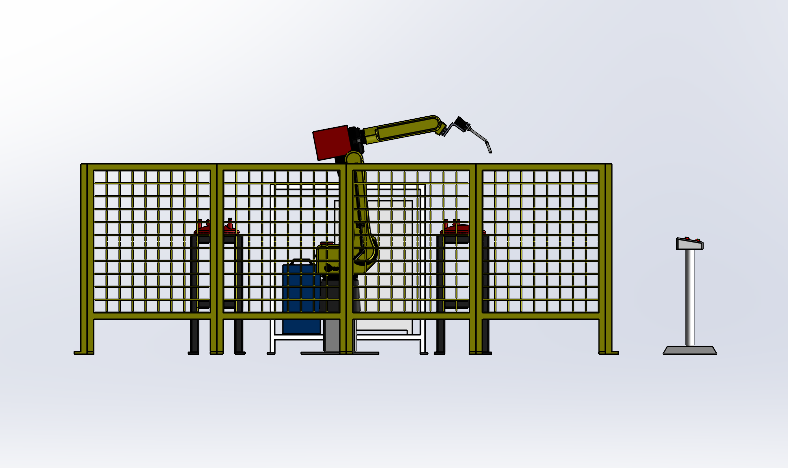
| 3 | 侧视图.png | 146.64K |
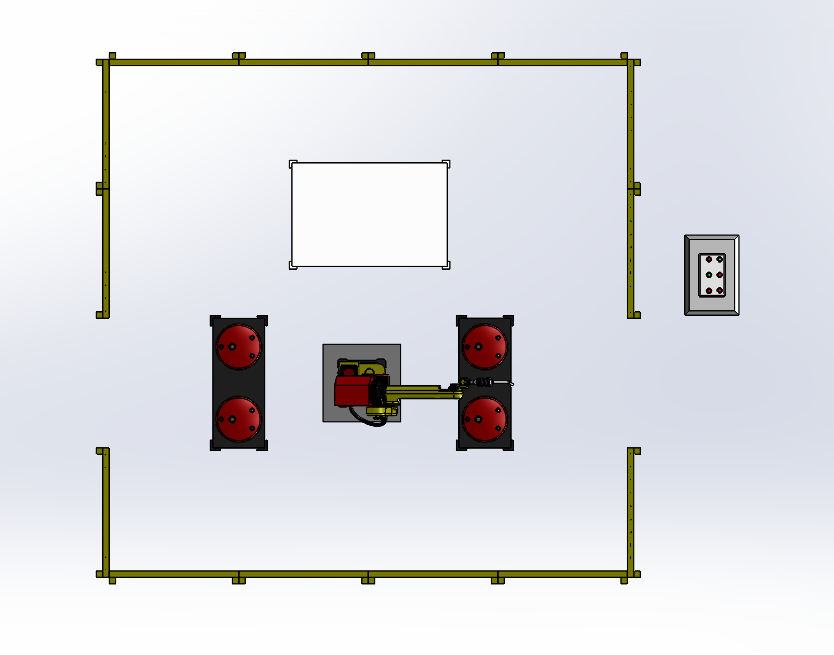
| 4 | 俯视图.png | 89.14K |
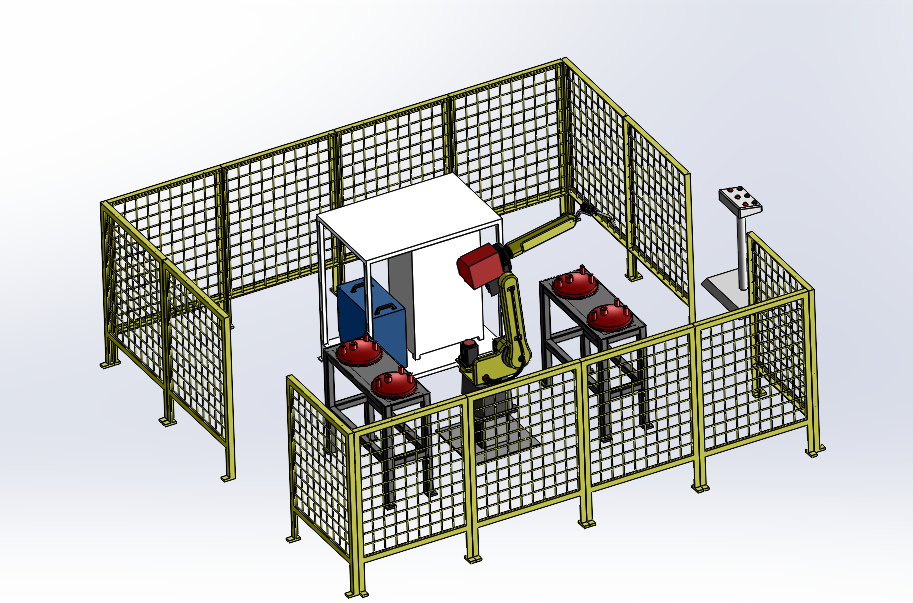
| 5 | 总图.png | 372.37K |
| 6 | JQR-01.SLDPRT | 156.29K |
| 7 | JQR-02.SLDPRT | 879.84K |
| 8 | JQR-03.SLDPRT | 406.84K |
| 9 | JQR-05.SLDPRT | 1.27M |
| 10 | JQR-L1.SLDPRT | 170.58K |
| 11 | JQR-L2.SLDPRT | 184.41K |
| 12 | JQR-L4.SLDPRT | 110.51K |
| 13 | 人.SLDPRT | 760.56K |
| 14 | 华远NB200、250、315、350逆变式气体焊机.SLDPRT | 305.64K |
| 15 | 定位销.SLDPRT | 80.33K |
| 16 | 封头工位.SLDASM | 297.66K |
| 17 | 封头总装配.SLDASM | 2.19M |
| 18 | 小机器人底座.SLDPRT | 105.27K |
| 19 | 控制面板.SLDPRT | 172.43K |
| 20 | 放置架.SLDPRT | 216.32K |
| 21 | 放置架单元.SLDASM | 133.17K |
| 22 | 有接头封头.SLDPRT | 266.31K |
| 23 | 机器人MA1400.SLDASM | 1.29M |
| 24 | 架子.SLDPRT | 298.59K |
| 25 | 模具.SLDPRT | 111.51K |
| 26 | 焊枪内夹持座.SLDPRT | 141.26K |
| 27 | 焊枪加持架.SLDPRT | 83.72K |
| 28 | 焊枪外夹持座.SLDPRT | 87.89K |
| 29 | 焊枪转接法兰.SLDPRT | 178.92K |
| 30 | 配电柜.SLDPRT | 94.29K |
| 31 | 防护网.SLDPRT | 544.72K |
此图纸下载需要66金币
立即下载
发布者
爱吃猫的鱼
创作: 7976
粉丝: 28
加入时间:2023-09-02

模型信息
图纸格式:sldprt,sldasm
文件大小:11.07M
所需金币:66
上传时间:2023-10-29 22:51:31
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2020
标签
机器人
工作站
智能化
非标
自动化
图纸简介
本工作站采用单机器人双工位的焊接方式; 该机器人焊接工作站主要包括弧焊机器人、电弧跟踪系统、系统集成控制柜、焊接电源、焊接工装夹具、放置架单元、外围防护网等组成。
工件装卸方式:工件装卸建议采用人工方式。
焊接工艺:焊接时采用氩弧焊。焊接时,先将工件用工装夹具夹装好,启动机器人进行焊接。焊接质量能够通过买方质量检验部门按照中国的国家标准或者买方的企业标准进行的检测。
机器人配置FANUC电缆内置型机器人。
前期应做离线编程模拟实验。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

