
登录注册
机器人倒装行走机构(ID:815893)

0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17009091625840.zip | 27.90M |
| 2 | 主视图.png | 51.15K |
| 3 | 侧视图.png | 49.78K |
| 4 | 俯视图.png | 96.71K |
| 5 | 总图.png | 165.57K |
| 6 | 45加长滑座.SLDPRT | 91.92K |
| 7 | 45导轨.SLDPRT | 53.80K |
| 8 | 5500.SLDPRT | 358.76K |
| 9 | ANFX-P130W7XL3-21.SLDPRT | 214.09K |
| 10 | DEFAULT-1.SLDPRT | 2.12M |
| 11 | DEFAULT-2.SLDPRT | 1.97M |
| 12 | DEFAULT-3.SLDPRT | 2.42M |
| 13 | DEFAULT-4.SLDPRT | 2.71M |
| 14 | DEFAULT-5.SLDPRT | 2.26M |
| 15 | DEFAULT.SLDPRT | 1.17M |
| 16 | FANUC-1.6KW伺服电机.SLDPRT | 114.59K |
| 17 | JQR-L4.SLDPRT | 87.19K |
| 18 | M20IA.SLDASM | 2.74M |
| 19 | 侧连接板.SLDPRT | 47.71K |
| 20 | 压紧地脚.SLDPRT | 68.48K |
| 21 | 压紧地脚2.SLDPRT | 91.77K |
| 22 | 固定板.SLDPRT | 53.09K |
| 23 | 圆柱齿轮31×3.SLDPRT | 321.13K |
| 24 | 复件5500.SLDPRT | 356.12K |
| 25 | 导轨护罩.SLDPRT | 65.10K |
| 26 | 导轨端面硬限位板.SLDPRT | 57.62K |
| 27 | 底座1.SLDASM | 154.08K |
| 28 | 底座2.SLDASM | 132.77K |
| 29 | 托盘.SLDPRT | 138.20K |
| 30 | 拖链槽.SLDPRT | 62.49K |
| 31 | 斜拉杆.SLDPRT | 71.73K |
| 32 | 机器人倒装行走机构.SLDASM | 7.11M |
| 33 | 桶装焊丝.SLDPRT | 117.02K |
| 34 | 横梁.SLDPRT | 154.60K |
| 35 | 正面连接板.SLDPRT | 49.64K |
| 36 | 水箱支架.SLDPRT | 121.21K |
| 37 | 焊丝桶放置架.SLDASM | 105.82K |
| 38 | 焊机.SLDPRT | 675.28K |
| 39 | 电机减速机安装座.SLDPRT | 113.74K |
| 40 | 电机护罩.SLDPRT | 265.81K |
| 41 | 立柱转接安装板.SLDPRT | 62.02K |
| 42 | 行走立柱.SLDPRT | 157.70K |
| 43 | 连接板1.SLDPRT | 42.42K |
| 44 | 防滑板.SLDPRT | 909.70K |
| 45 | 齿条m3.SLDPRT | 301.26K |
| 46 | 齿条护罩.SLDPRT | 60.40K |
此图纸下载需要66金币
立即下载
发布者
爱吃猫的鱼
创作: 7978
粉丝: 20
加入时间:2023-09-02

模型信息
图纸格式:sldprt,sldasm
文件大小:28.57M
所需金币:66
上传时间:2023-11-25 18:46:12
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2020
标签
图纸简介
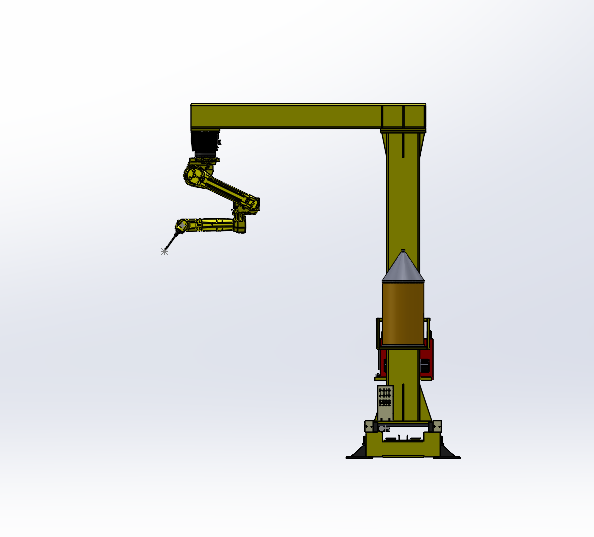
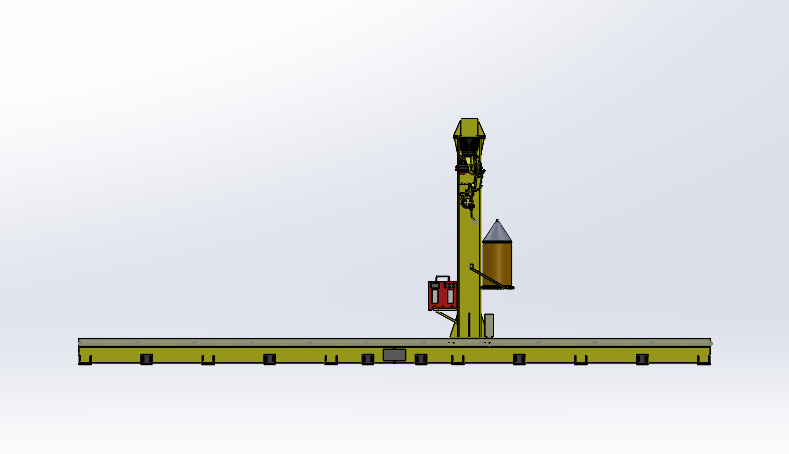
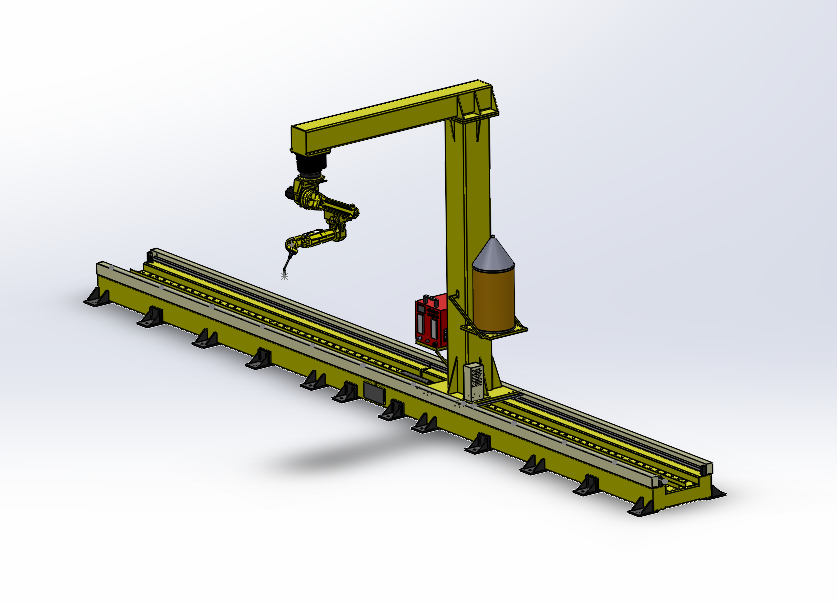
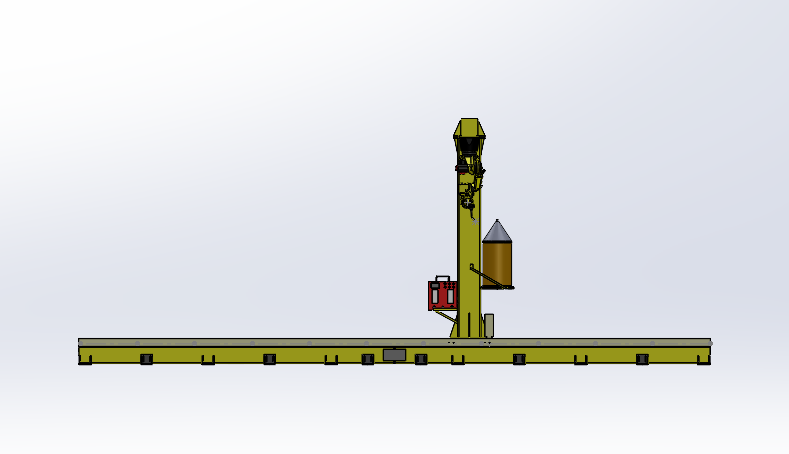
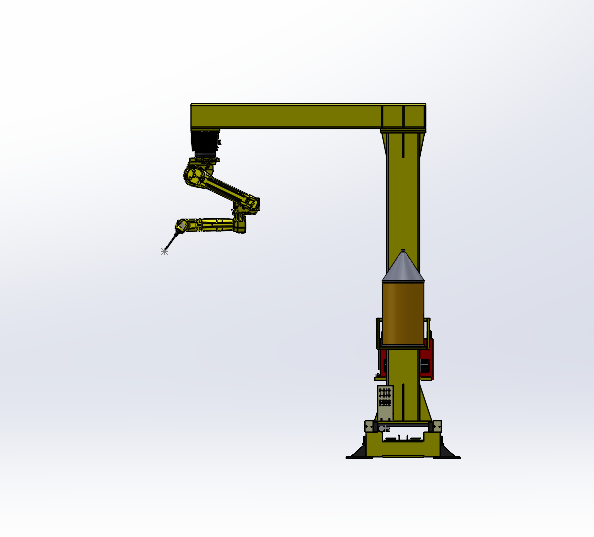
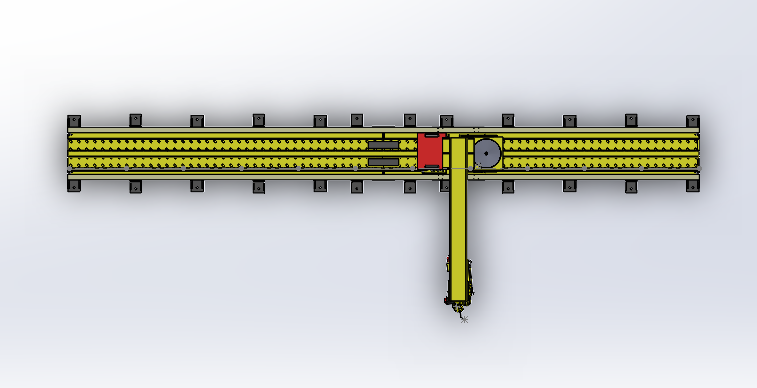
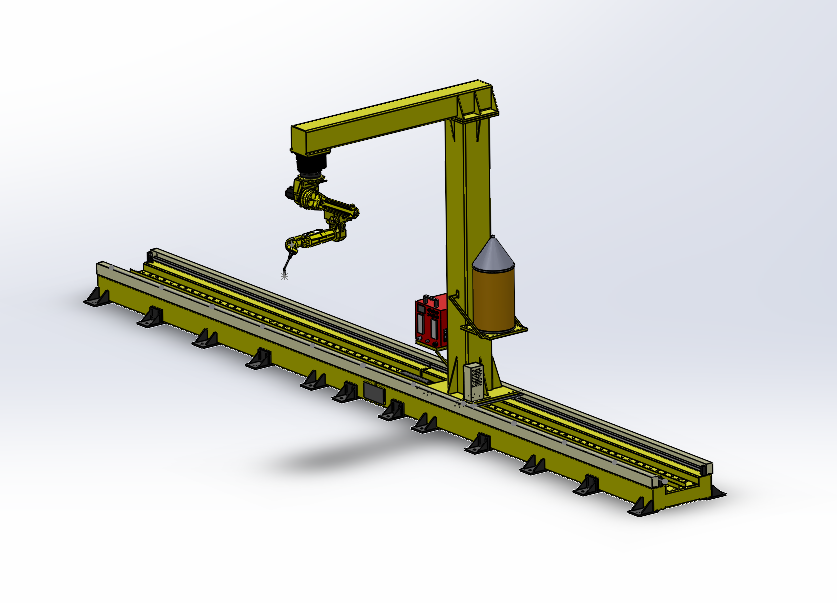
该设备为机器人倒装行走机构,主要功能是为了增加机器人焊接范围及高度。该设备主要由机器人本体、焊接、焊丝筒、清枪站、地轨平台、立柱、悬臂等部件组成;该设备地轨整体焊接后加工,使用伺服电机驱动齿轮齿条进行传动行走,整体结构紧凑、坚固。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0_0_364.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

