
登录注册
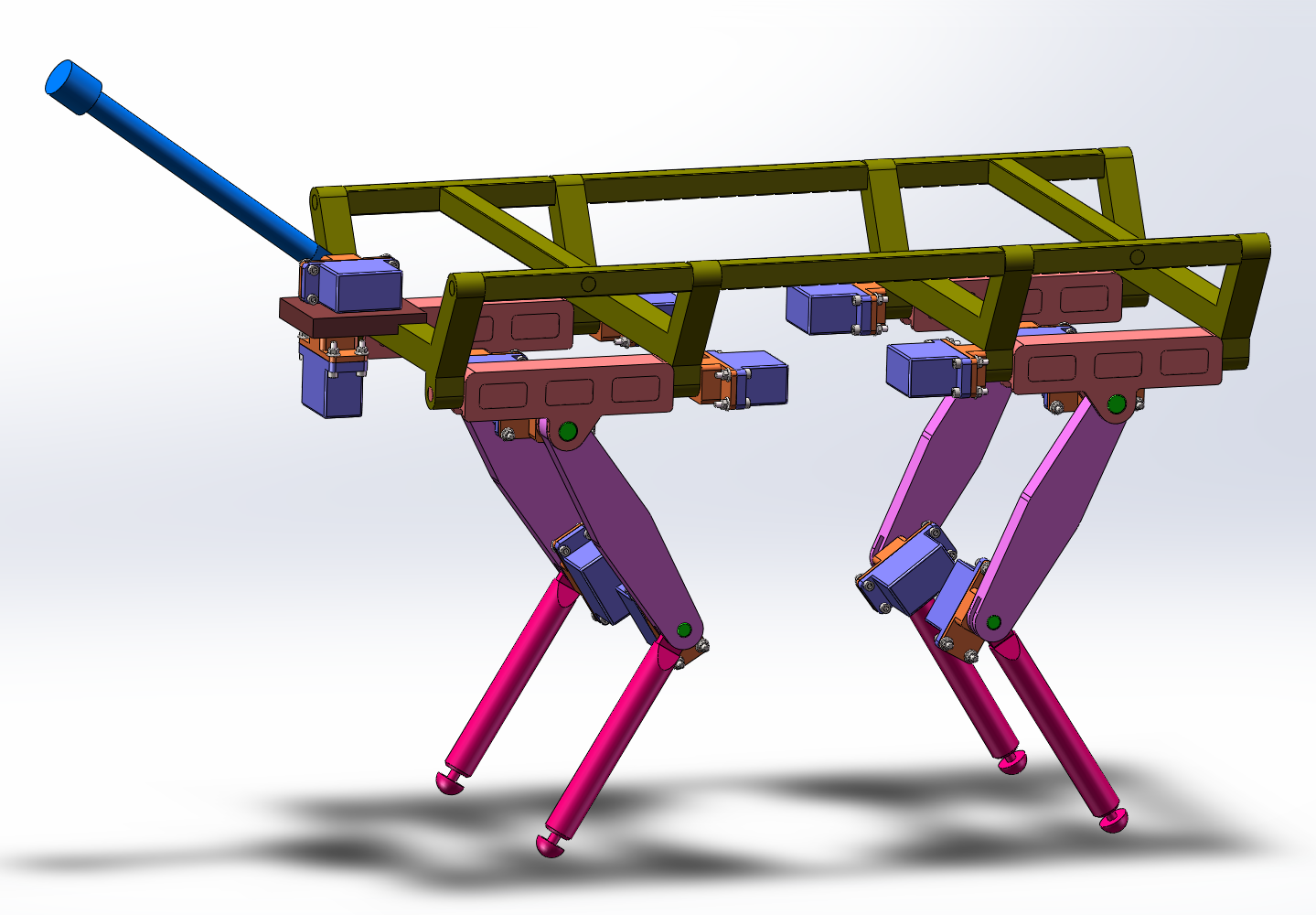
行走机器人(ID:941528)




0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1706979606839.zip | 2.20M |
| 2 | GB/T6187-2000全金属六角法兰面锁紧螺母M6-0.SLDPRT | 131.46K |
| 3 | GB/T70.1-2000内六角圆柱头螺钉M6×30-0.SLDPRT | 122.42K |
| 4 | 大腿0.SLDPRT | 86.17K |
| 5 | 小腿0.SLDPRT | 122.09K |
| 6 | 尾巴0.SLDPRT | 97.27K |
| 7 | 尾巴旋转头0.SLDPRT | 88.36K |
| 8 | 支架1.SLDPRT | 88.97K |
| 9 | 支架2.SLDPRT | 88.04K |
| 10 | 支架尾巴支座1.SLDPRT | 76.02K |
| 11 | 梁1.SLDPRT | 97.46K |
| 12 | 梁2.SLDPRT | 87.28K |
| 13 | 梁3.SLDPRT | 84.95K |
| 14 | 滑髋0.SLDPRT | 171.63K |
| 15 | 舵机00.SLDPRT | 126.12K |
| 16 | 舵机固定座00.SLDPRT | 143.94K |
| 17 | 舵机安装组件0.SLDASM | 184.26K |
| 18 | 行走机器人0.SLDASM | 364.52K |
| 19 | 轴10.SLDPRT | 90.33K |
| 20 | 轴20.SLDPRT | 91.92K |
此图纸下载需要250金币
立即下载
发布者
机械与液压(原创) +V:o627951491
创作: 684
粉丝: 69
加入时间:2023-10-23
模型信息
图纸格式:sldprt,sldasm
文件大小:2.26M
所需金币:250
上传时间:2024-02-04 01:00:12
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2016
标签
行走机器人
图纸简介
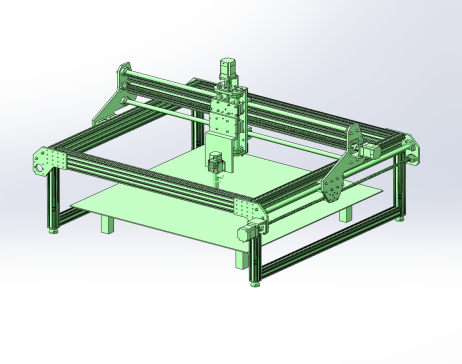
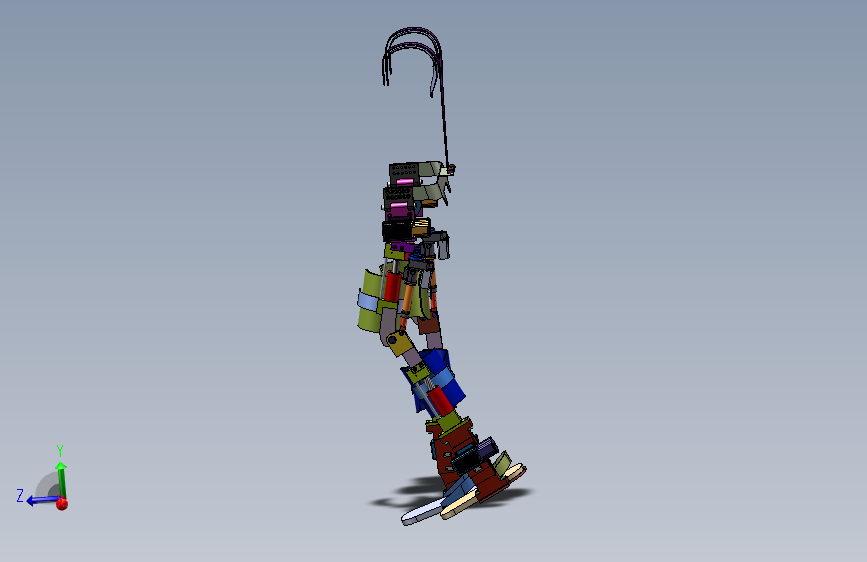
本设计为行走机器人的主体三维SW2016设计,包含了整体框架设计,大腿设计,小腿设计,尾巴设计,以及各关节的驱动装置-舵机的设计等。本设计的所有关节驱动用舵机实现。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多


0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.jpg)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)

