
登录注册
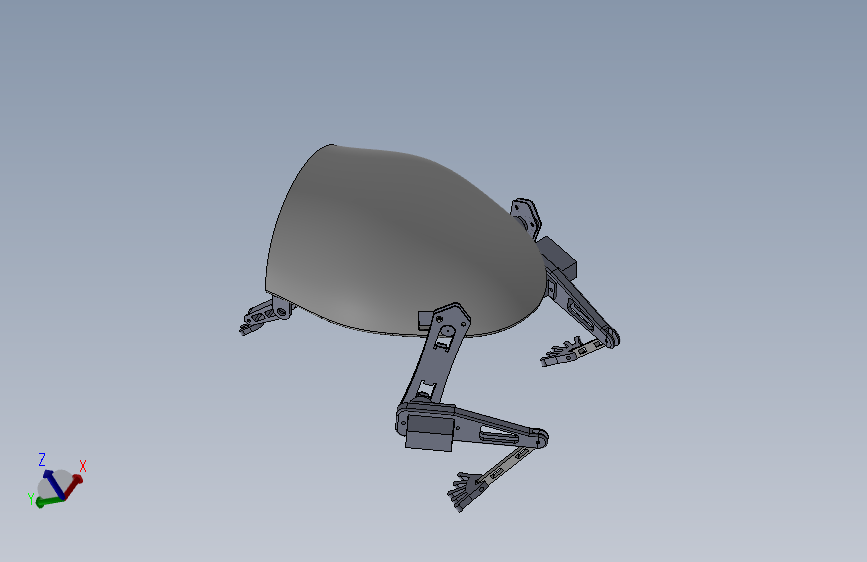
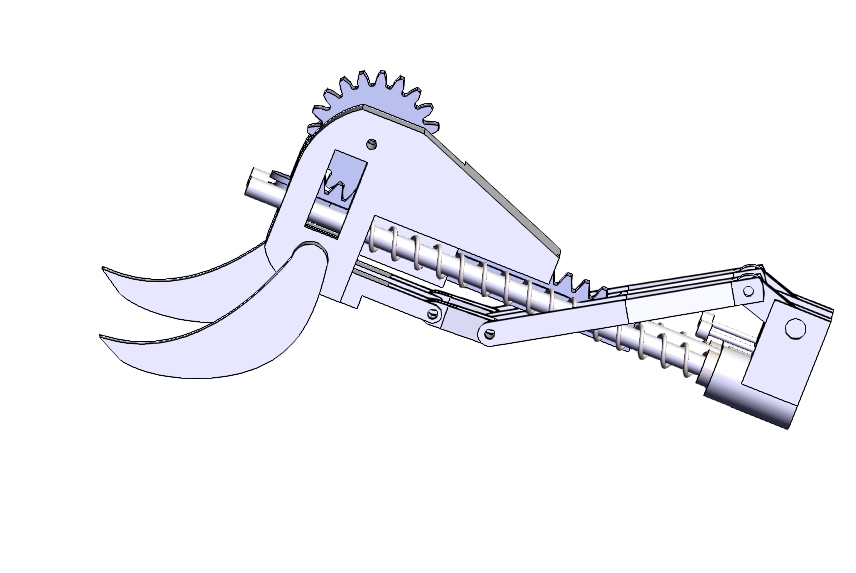
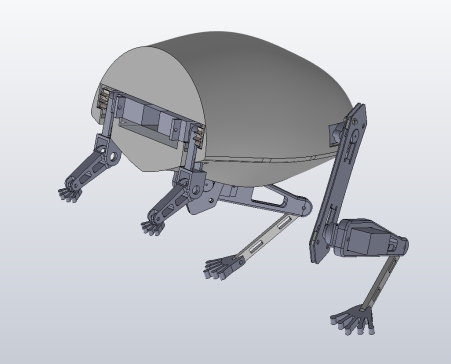
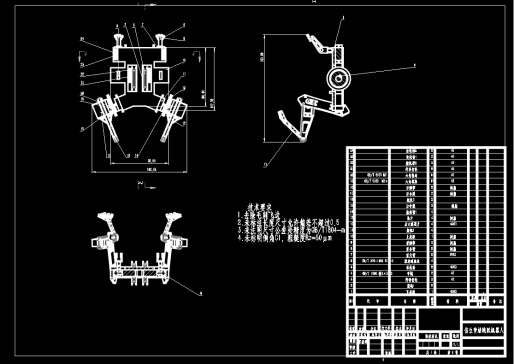
仿生青蛙跳跃机器人(ID:951655)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1707485140907.rar | 4.04M |
| 2 | 总体.SLDASM | 921.30K |
| 3 | 前掌.SLDPRT | 88.44K |
| 4 | 前掌2.SLDPRT | 100.89K |
| 5 | 头部.SLDPRT | 255.44K |
| 6 | 圆柱齿轮10×1.SLDPRT | 342.01K |
| 7 | 弹簧.SLDPRT | 879.12K |
| 8 | 后腿new.SLDPRT | 201.25K |
| 9 | 连接后腿的第三个零件.SLDPRT | 209.28K |
| 10 | 连接后腿的第二个零件.SLDPRT | 118.11K |
| 11 | 连接后腿的第四个零件.SLDPRT | 122.86K |
| 12 | 连接后腿第一个支架.SLDPRT | 124.85K |
| 13 | 铁小圆柱-副本.SLDPRT | 83.21K |
| 14 | 圆柱.SLDPRT | 131.67K |
| 15 | 圆柱齿轮20×1.SLDPRT | 456.52K |
| 16 | 齿条0.0628318530717959×1.SLDPRT | 312.95K |
此图纸下载需要5金币
立即下载
发布者
活泼的小霸王
创作: 6359
粉丝: 228
加入时间:2022-10-08
模型信息
图纸格式:sldasm,sldprt
文件大小:4.13M
所需金币:5
上传时间:2024-02-09 21:25:43
是否可编辑:可修改,包括参数
版本:SOLIDWORKS
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0_0_364.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0_0_364.png)

