
登录注册
当前位置 >
图 纸
0.png)
可打印Sata热插拔硬盘盒
1
0
12
SOLIDWORKS 2008
2026-01-14 23:28
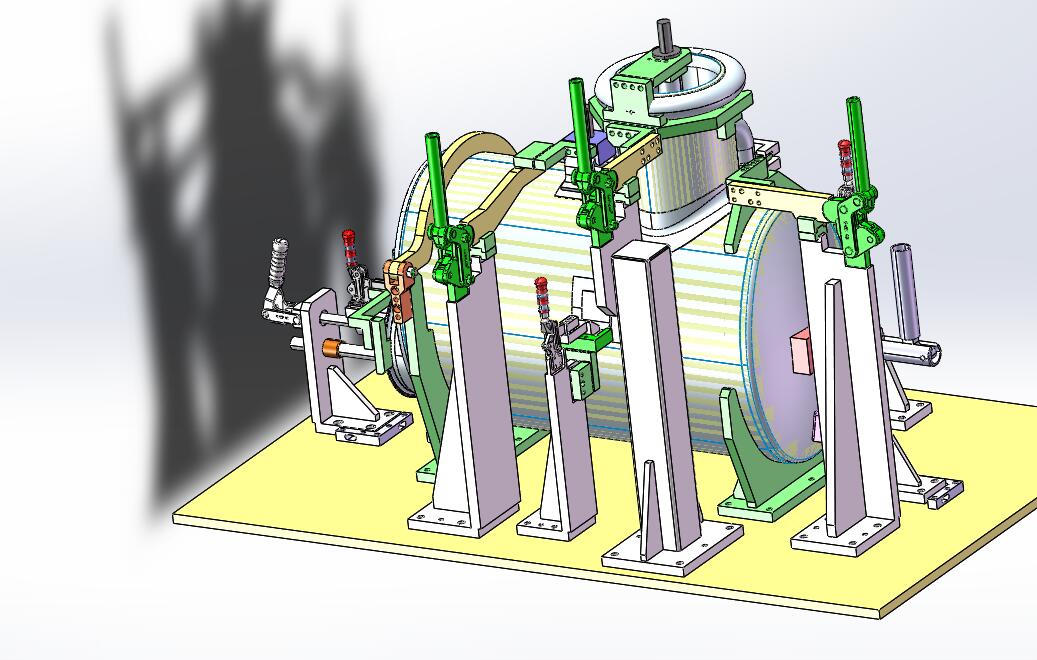
箱体焊接工装夹具2
0
0

59
IGES
2026-01-14 21:55
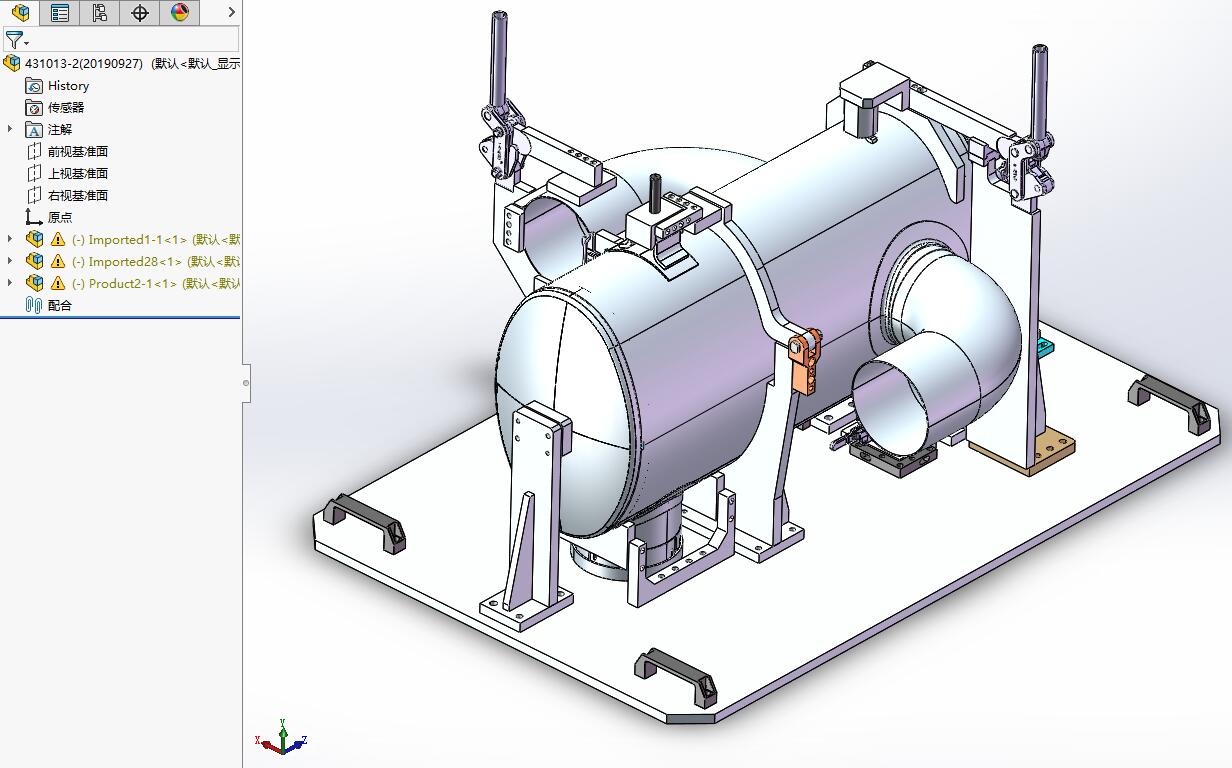
箱体焊接工装夹具
1
0
59
IGES
2026-01-14 21:54
0.png)
远程车位锁图纸 step格式
2
0

8
SOLIDWORKS 2016
2026-01-14 21:54
0.png)
一次性口罩医用模具
2
0

15
STEP
2026-01-14 22:39
0.png)
推瓶机构2
2
0
15
STEP
2026-01-14 22:39
0.png)
头戴VR眼镜
0
0
15
STEP
2026-01-14 22:38
0.png)
三轴机械臂 x_t格式
1
0
8
SOLIDWORKS 2016
2026-01-14 21:53
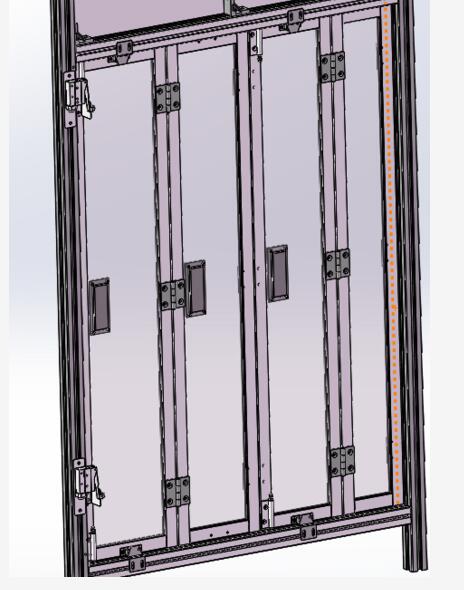
四扇折叠门
0
0
59
STEP
2026-01-14 21:53
0.png)
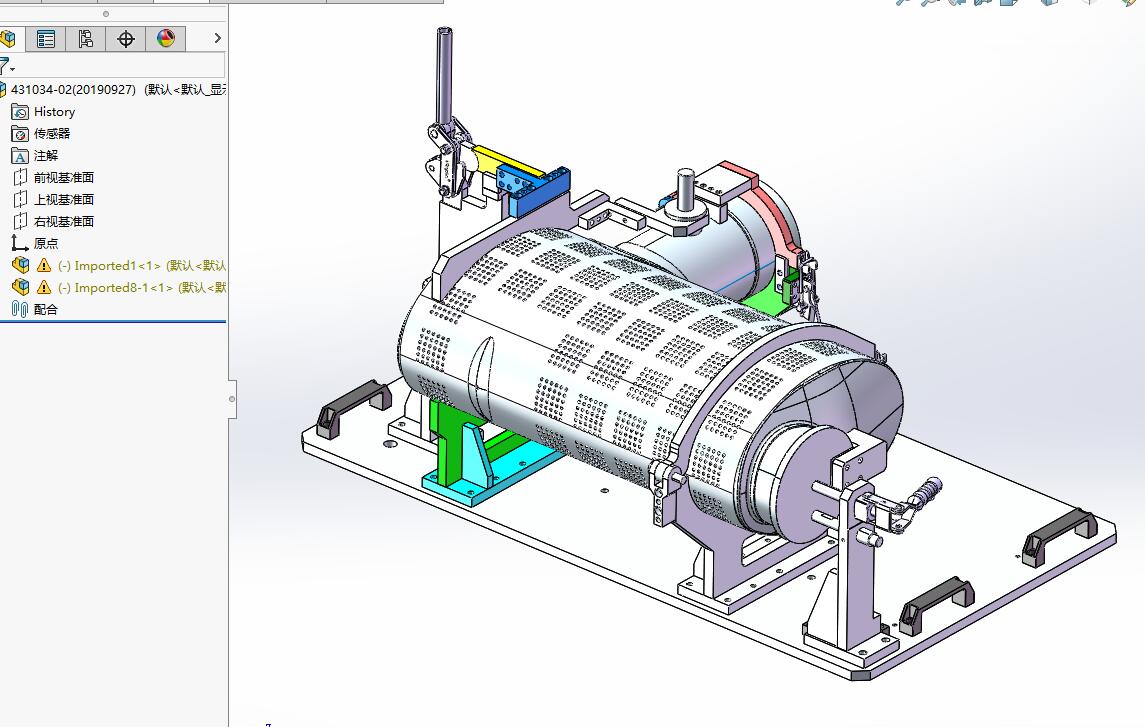
手动箱体焊接工装夹具
1
0
59
IGES
2026-01-14 21:52
0.png)
同步带轮夹具胀紧套带轮夹具
1
0
15
STEP
2026-01-14 22:38
0_0_364.png)
天轨玻璃搬运
1
0
15
STEP
2026-01-14 22:38
0.png)
条状输送带
1
0
15
STEP
2026-01-14 22:38
0.png)
迷你型仓库移动梯 stp
0
0
8
SOLIDWORKS 2016
2026-01-14 21:52
0.png)
台式注塑机
0
0
15
STEP
2026-01-14 22:38
手动定位夹具治具
1
0
59
IGES
2026-01-14 21:52
0.png)
隧道洞穴履带机器人车3D图纸 Solidworks设计
2
0
15
STEP
2026-01-14 22:38
0.png)
饲料搅拌机
0
0
15
STEP
2026-01-14 22:38
0.png)
开卷翅片压力机 sw24
3
0
8
SOLIDWORKS 2024
2026-01-14 21:51
0.png)
四足爬行机器人
2
0
15
STEP
2026-01-14 22:38
0.png)
简易一级斜齿轮传动减速器 sw21
0
0
8
SOLIDWORKS 2021
2026-01-14 21:51
0_0_364.png)
四叶风扇
2
0
15
STEP
2026-01-14 22:38
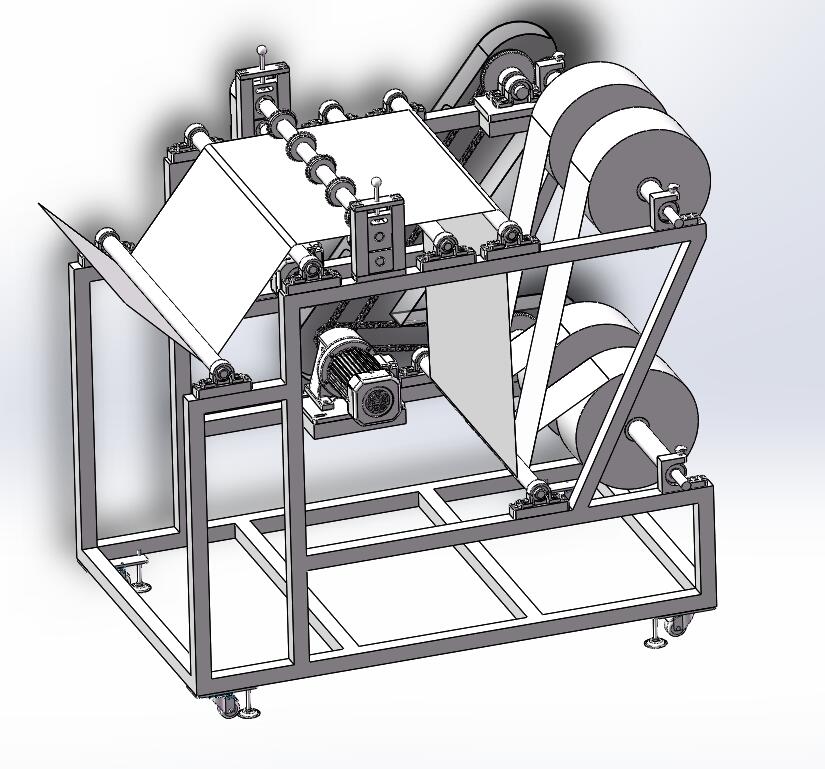
熔喷布输送分切机设备
1
0
59
STEP
2026-01-14 21:50
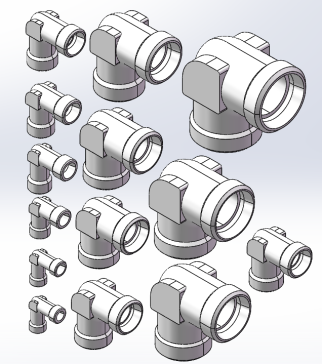
卡套式直角接头 14款
0
0

10
SOLIDWORKS 2020
2026-01-14 21:50
0.png)
防扭转式旋转链钩 STP格式
0
0
18
SOLIDWORKS 2016
2026-01-14 21:49
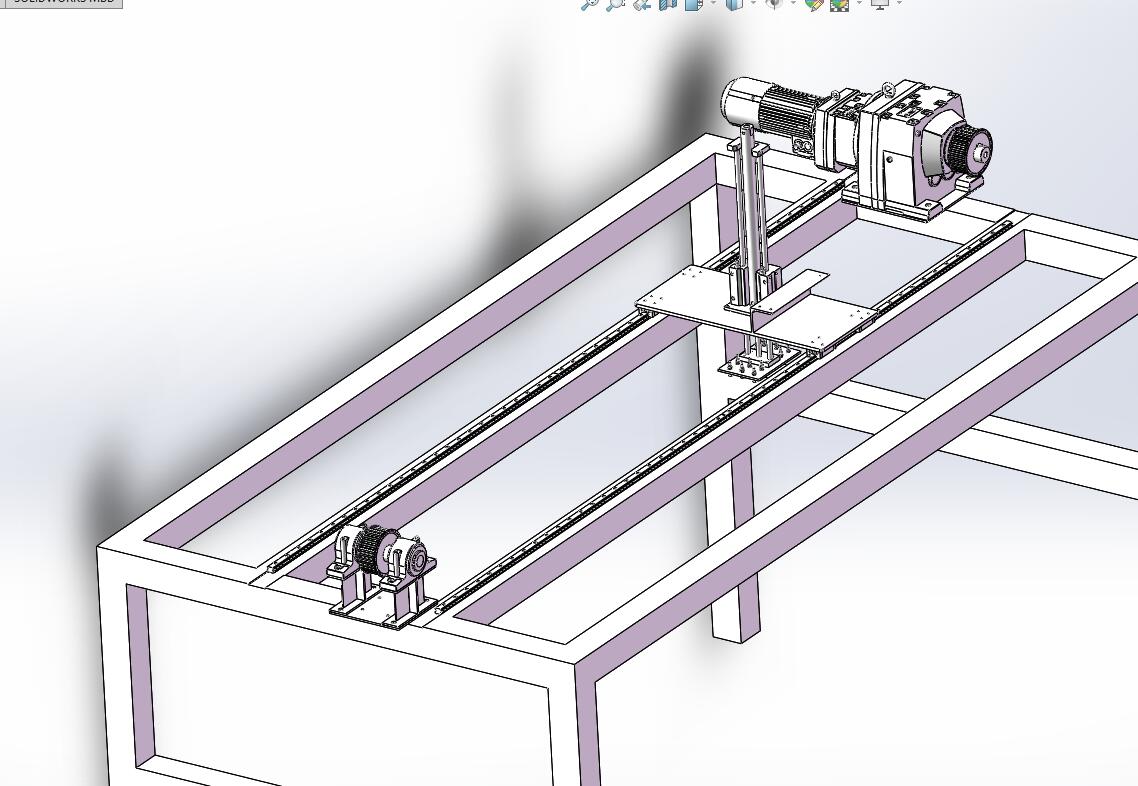
简易移栽机
0
0
59
SOLIDWORKS 2018
2026-01-14 21:49
0.png)
带四指末端夹爪的小型SCARA机械臂 STP格式
1
0
8
SOLIDWORKS 2016
2026-01-14 21:48
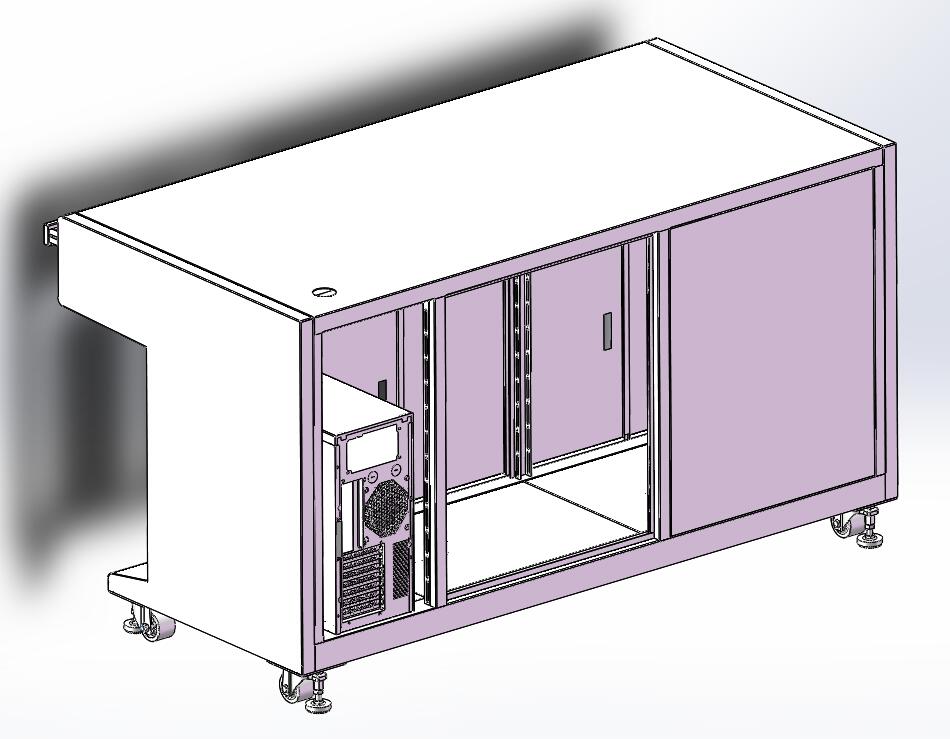
操作台
0
0
59
STEP
2026-01-14 21:47
0.png)
NC35头戴式耳机 stp
1
0
88
SOLIDWORKS 2016
2026-01-14 21:46
1.5米多楔带辊道线
0
0
59
SOLIDWORKS 2016
2026-01-14 21:45
0.png)
焊接机器人抽风系统
1
0
59
SOLIDWORKS 2016
2026-01-14 21:36
0.png)
丝杆提升机
2
0
15
STEP
2026-01-14 22:38
0.png)
丝杆升降板材夹具
2
0
15
STEP
2026-01-14 22:38
0.png)
双轴坐标桁架搬运
2
0
15
STEP
2026-01-14 22:37
汽车空调压缩缸体和缸盖双工位液压夹具
1
0
59
STEP
2026-01-14 21:35
0.png)
水管阀门三维模型
1
0
15
STEP
2026-01-14 22:37
0.png)
双水泵控制箱
1
0
15
STEP
2026-01-14 22:37
0.png)
自动移栽设备
0
0

41
STEP
2026-01-14 21:34
0.png)
双工位输送移栽设备
1
0
15
STEP
2026-01-14 22:37
机械缩口盘
0
0
59
STEP
2026-01-14 21:32

