
登录注册
光滑和人体工程学的门把手设计
3
0

20
SOLIDWORKS 2021
2025-06-07 09:03
0.png)
G032507-脚轮=机器人机械臂
3
0
20
Inventor 2013
2025-06-07 08:44
0.png)
G032506-脚轮 CHJSS75A=机器人机械臂
3
0
20
IGES
2025-06-07 08:42
0.png)
G032505-脚轮 CHJSM75=机器人机械臂
3
0
20
IGES
2025-06-07 08:40
G032504-脚轮 40mm 高度=机器人机械臂
4
0
20
IGES
2025-06-07 08:38
G032503-脚轮 (3)=机器人机械臂
3
0
20
STEP
2025-06-07 08:36

G032501-脚轮 (1)=机器人机械臂
3
0
20
STEP
2025-06-07 08:32
0.png)
G032499-铰链=机器人机械臂
5
0
20
SOLIDWORKS 2021
2025-06-07 08:28
0_0_364.png)
G032444-减震器=机器人机械臂
4
0
20
SOLIDWORKS 2016
2025-06-07 08:20
0.png)
带脚轮概念设计的2轮差
4
0
20
PROE*CREO 4.0
2025-06-06 10:10
0.png)
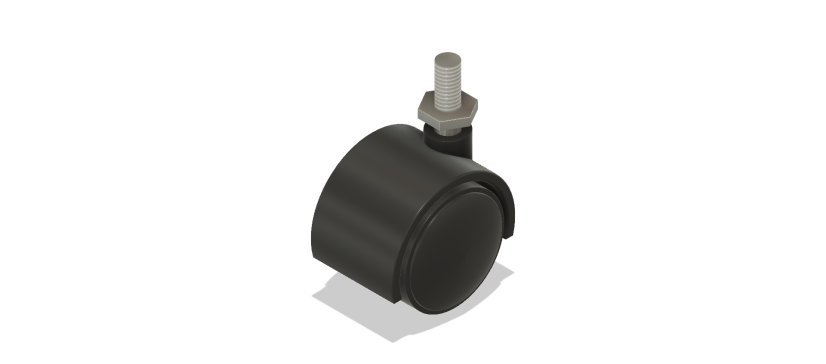
脚轮 65 毫米
3
0
20
SOLIDWORKS 2023
2025-06-05 20:08
0.png)
D80Xd12波纹六星把手(内牙)
9
0

5
SOLIDWORKS 2012
2025-06-05 12:31
0.png)
D78.5Xd12波纹数字手轮
10
0
5
SOLIDWORKS 2010
2025-06-05 12:31
0.png)
49X50合页
10
0
5
SOLIDWORKS 2010
2025-06-05 12:31
0.png)
M6X20条纹把手(外牙)
7
0
5
SOLIDWORKS 2012
2025-06-05 12:28
0.png)
G026797-合规铰链概念+(1)+夹爪
3
0

10
STEP
2025-06-04 23:44
0.png)
G026790-合规铰链概念+夹爪
3
0
10
STEP
2025-06-04 23:44
0.png)
G026542-把手杆=直升机
2
0
10
STEP
2025-06-04 23:30
0.png)
90 度锁左手折叠铰链
6
0

20
SOLIDWORKS 2023
2025-06-04 16:43
0.png)
五金美式铰链全自动装配机
8
0

0
SOLIDWORKS 2016
2025-06-04 16:14
0_0_364.png)
直臂铰链装配机
21
0
0
SOLIDWORKS 2016
2025-06-04 15:30
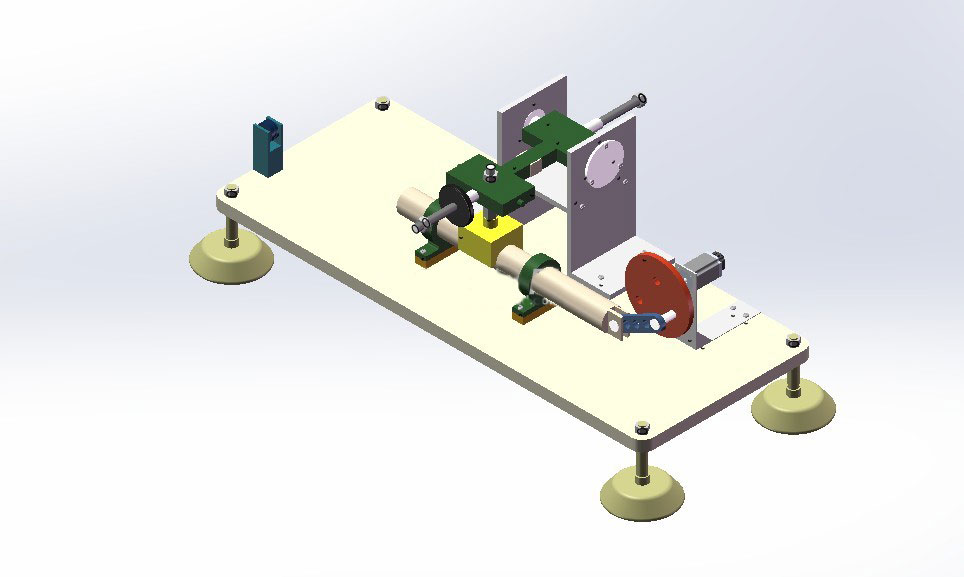
基于柔性铰链的往复式摩擦试验机结构
3
0

22
SOLIDWORKS
2025-06-04 15:18
0.png)
把手门锁3D模型图纸 Solidworks设计
2
0
57
SOLIDWORKS 2024
2025-06-04 15:16
0_0_364.png)
DX-120S福马轮,脚轮
3
0
57
SOLIDWORKS 2021
2025-06-04 15:16
0_0_364.png)
铰链两端力装配机
10
0
0
SOLIDWORKS 2016
2025-06-03 22:55
0.png)
柜门铰链
3
1

25
SOLIDWORKS 2020
2025-06-03 17:50
0_0_364.png)
G024961-门把手+++视频教程=飞机
3
0
10
STEP
2025-06-03 17:37
0.png)
G024868-两件盒,柔性铰链=飞机
4
0
10
STEP
2025-06-03 17:30
0.png)
G024702-铰链-RC=飞机
4
0
10
STEP
2025-06-03 17:10
0.png)
G024701-铰链_销连接=飞机
4
0
10
STEP
2025-06-03 17:10
0.png)
G024092-大脚轮胎海狸DHC-2+RC平面AA+1500mm=飞机
6
0
10
STEP
2025-06-03 16:00
0_0_364.png)
G023928-把手轮=飞机
6
0
10
STEP
2025-06-03 15:43
0.png)
G023743-RC平面铰链=飞机
2
0
10
STEP
2025-06-03 15:27

G027506-76毫米脚轮的角支架=机器人机械臂
6
0
20
STEP
2025-06-03 15:22
N010512-减震器
3
0
20
SOLIDWORKS 2019
2025-06-03 11:46
0.png)
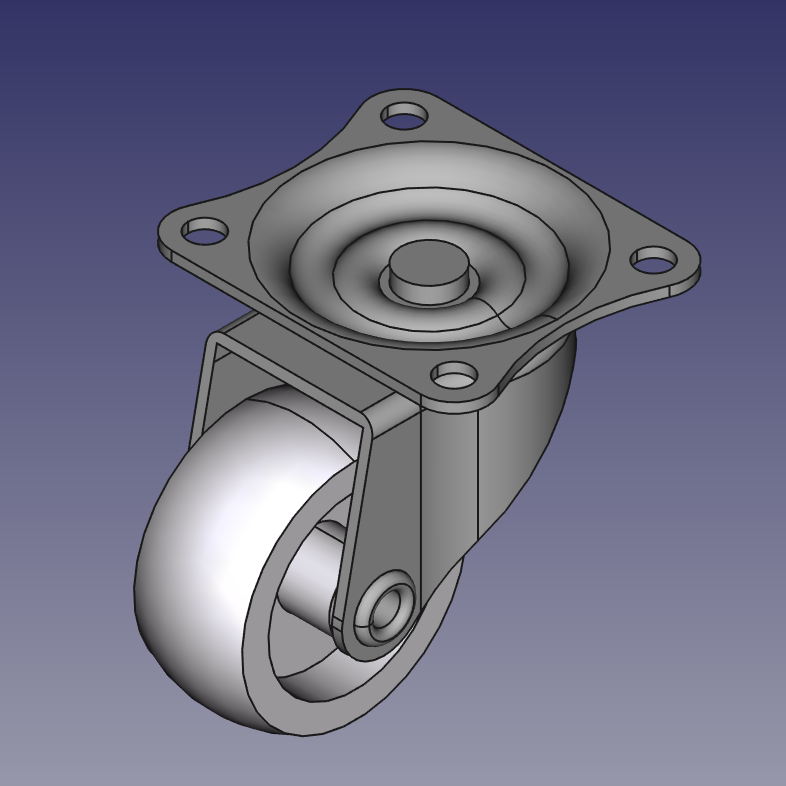
N010577-万向轮
6
0
20
SOLIDWORKS 2022
2025-06-03 11:43
0.png)
G026542-把手杆=直升机
3
0
20
SOLIDWORKS 2011
2025-06-02 22:51
0.png)
门把手
8
0
5
AutoCAD 2004
2025-06-02 20:34
0.png)
万向轮图纸设计--439551-20
3
0

50
SOLIDWORKS 2014
2025-06-02 12:05

G024868-两件盒,柔性铰链=飞机
2
0
20
AotuCAD dxf
2025-06-02 09:46

