
登录注册
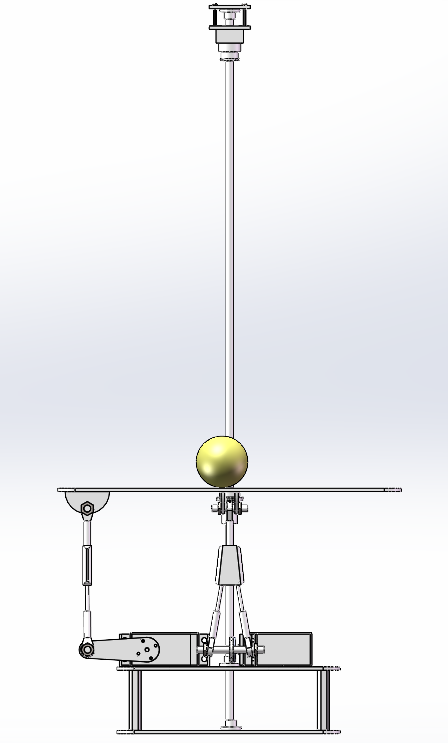
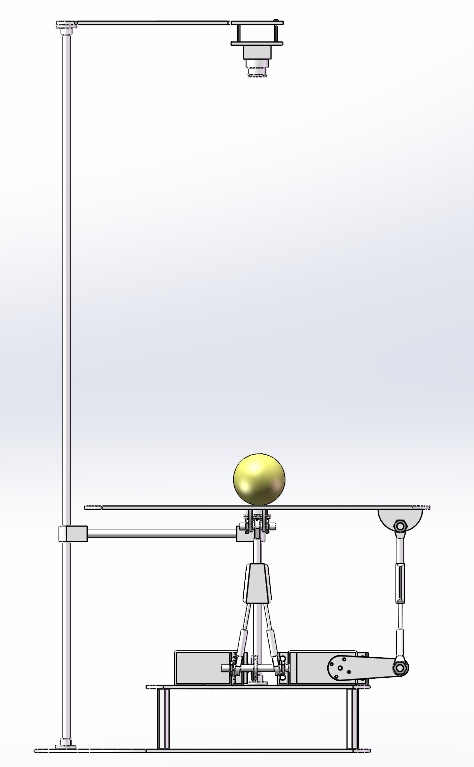
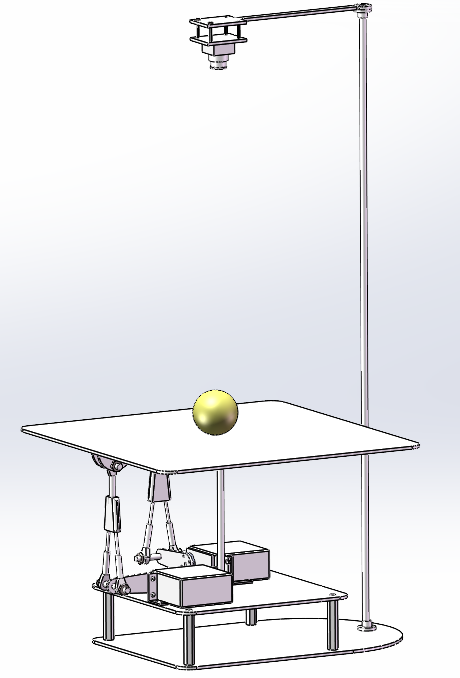
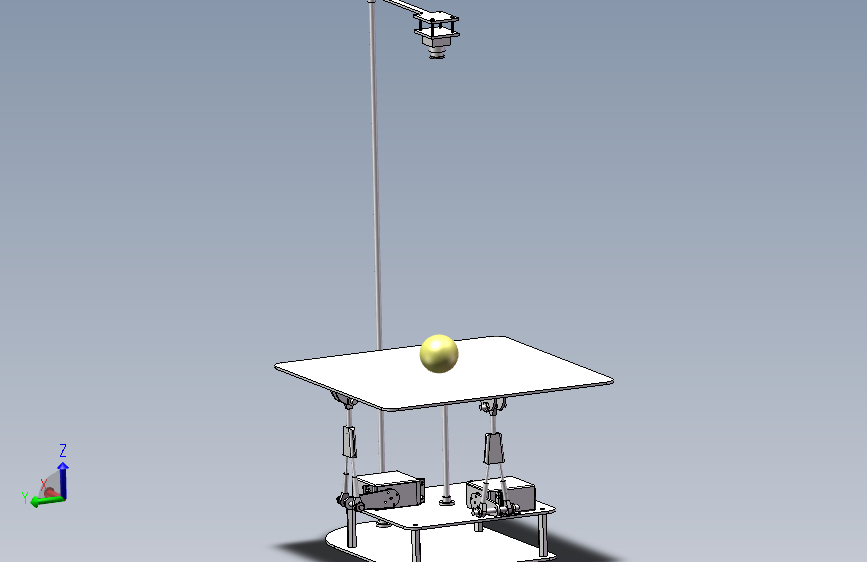
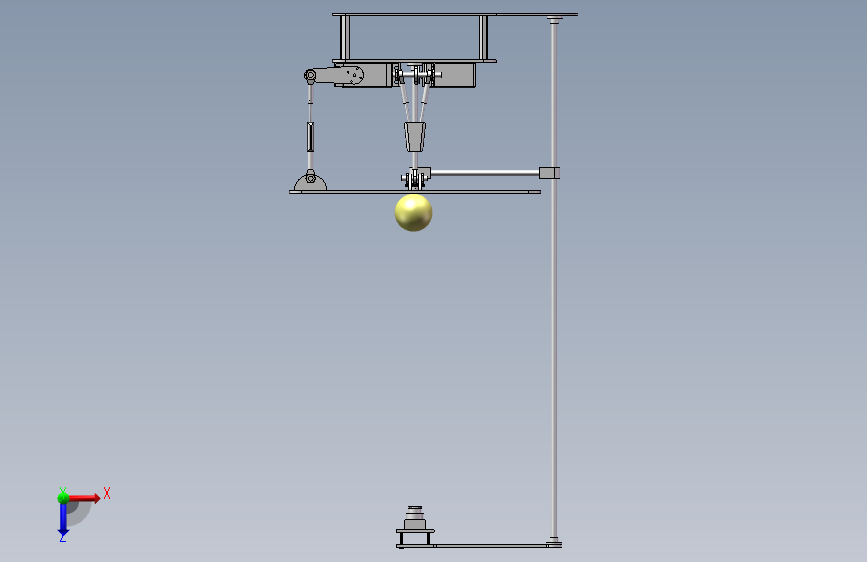
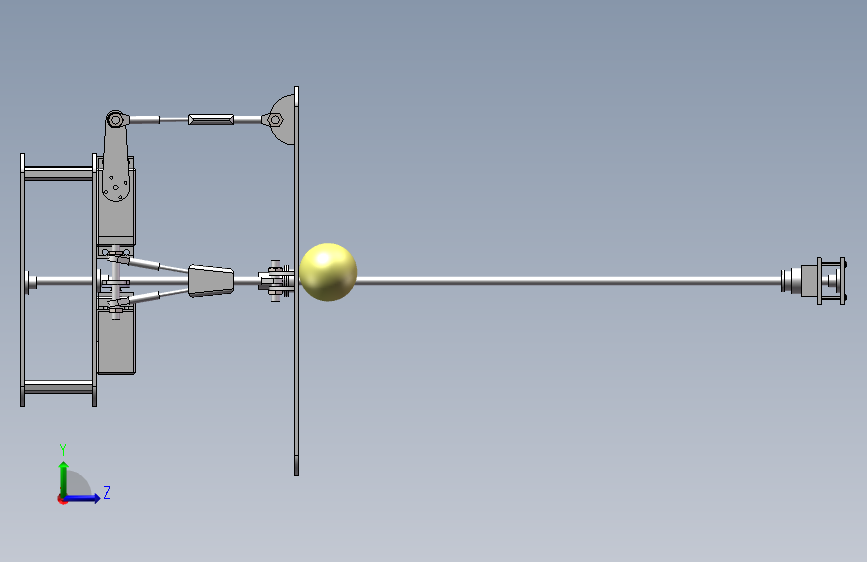
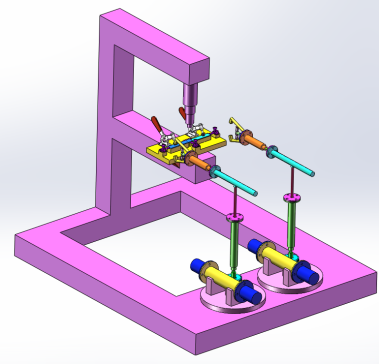
球平衡机器人(ID:1463412)
截图
AI截图渲染
✨AI图片渲染
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17188086041282.rar | 3.69M |
| 2 | hexagonsocketheadcapscrewsgb.sldprt | 272.81K |
| 3 | slottedpanheadscrewsgb.sldprt | 199.42K |
| 4 | smallhexthinnuts-finepitchthreadgb.sldprt | 157.87K |
| 5 | 备份属于舵盘1.SLDPRT | 359.87K |
| 6 | 平衡板.SLDPRT | 87.31K |
| 7 | 底板.SLDPRT | 69.50K |
| 8 | 摆杆.SLDPRT | 72.35K |
| 9 | 横撑杆.SLDPRT | 78.17K |
| 10 | 球.SLDPRT | 167.59K |
| 11 | 球平衡机器人.SLDASM | 543.38K |
| 12 | 球铰上客.SLDPRT | 89.44K |
| 13 | 球铰下壳.SLDPRT | 106.01K |
| 14 | 球铰杆.SLDPRT | 50.22K |
| 15 | 相机.SLDPRT | 94.26K |
| 16 | 相机板.SLDPRT | 76.99K |
| 17 | 短杆.SLDPRT | 67.23K |
| 18 | 短杆1.SLDPRT | 62.18K |
| 19 | 立杆.SLDPRT | 55.56K |
| 20 | 联轴器.SLDPRT | 81.51K |
| 21 | 舵机体.SLDPRT | 493.57K |
| 22 | 舵机板.SLDPRT | 79.65K |
| 23 | 舵机架.SLDPRT | 66.20K |
| 24 | 螺杆.SLDPRT | 64.55K |
| 25 | 连接套1.SLDPRT | 110.44K |
| 26 | 连接杆1.SLDPRT | 67.26K |
| 27 | 连接架1.SLDASM | 42.88K |
| 28 | 连接锁具.SLDPRT | 81.84K |
| 29 | 连杆.SLDPRT | 102.43K |
| 30 | 连杆1.SLDPRT | 95.64K |
| 31 | 连杆2.SLDPRT | 63.07K |
| 32 | 铜柱.SLDPRT | 63.88K |
此图纸下载需要8金币
立即下载
发布者
机械小粤
创作: 965
粉丝: 100
加入时间:2023-06-17

模型信息
图纸ID:1463412
图纸格式:sldprt,sldasm
文件大小:3.78M
所需金币:8
上传时间:2024-06-19 22:50:07
是否可编辑:可修改,包括参数
软件版本:SOLIDWORKS 2021
标签
图纸简介
平衡机器人利用机器视觉系统“观察”球动态位置,并提前预判进行平衡动作,保证球始终处于安全不掉落的区域内。机器人的背后实际是一套位置位置跟踪和运动控制算法,而且这套算法是具有自我训练、学习能力的,经过一段时间的训练,目标满意值接近100%,即永不掉落。该模型为sw2021版本
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

