
登录注册
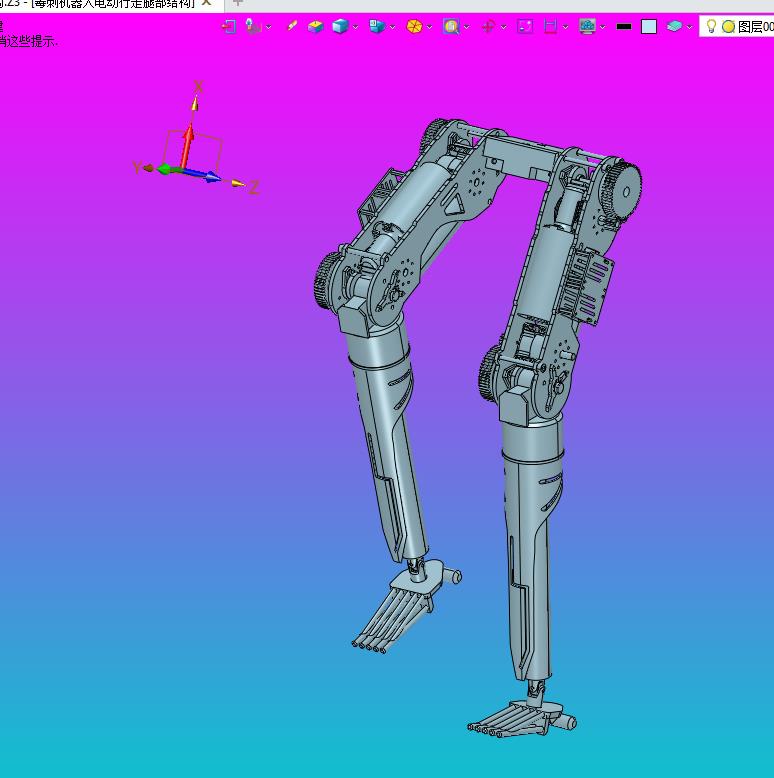
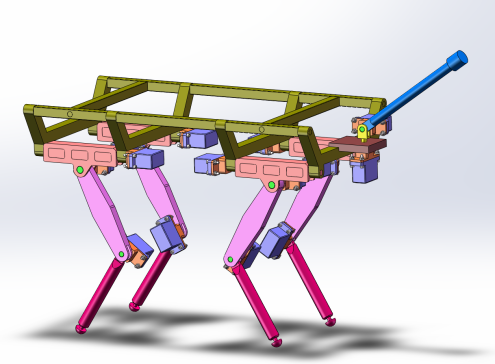
行走机器人腿部(ID:1492210)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17212755922243.rar | 20.88M |
| 2 | ak80-64-.stp | 113.47K |
| 3 | Ankle.png | 1.48M |
| 4 | Ankleaxisball.SLDPRT | 92.68K |
| 5 | Ankleconnector.SLDPRT | 250.32K |
| 6 | AnkleconnectorGAI.SLDDRW | 202.64K |
| 7 | AnkleconnectorGAI.SLDPRT | 136.55K |
| 8 | AnkleconnectorGAI1.SLDPRT | 135.71K |
| 9 | Anklejointframe.SLDPRT | 691.04K |
| 10 | Carbonfiberfootboard.SLDPRT | 210.60K |
| 11 | Compare.png | 2.49M |
| 12 | Exploration.png | 950.95K |
| 13 | Knee-upconnector.SLDPRT | 272.79K |
| 14 | Knee.png | 1.52M |
| 15 | middle.png | 3.45M |
| 16 | Pros-Embeded-Backward-max-2.png | 452.63K |
| 17 | Pros-Embeded-Backward-max.png | 126.38K |
| 18 | Pros-Embeded-Forward-max-2.png | 434.71K |
| 19 | Pros-Embeded-Forward-max.png | 123.97K |
| 20 | Pros-Embeded.png | 264.78K |
| 21 | Pullrod.SLDPRT | 149.09K |
| 22 | Pullrod2.SLDPRT | 159.14K |
| 23 | RoBoMasterA.SLDPRT | 86.16K |
| 24 | Six-dimensionalforcesensor.SLDPRT | 173.77K |
| 25 | TMotor-AK80-64_Official.SLDPRT | 179.71K |
| 26 | TX2.SLDPRT | 69.80K |
| 27 | 板夹2.SLDPRT | 120.20K |
| 28 | 碳纤维.SLDPRT | 117.41K |
| 29 | 膝关节右端盖.SLDPRT | 140.08K |
| 30 | 膝关节右端盖改.SLDDRW | 337.82K |
| 31 | 膝关节右端盖改.SLDPRT | 176.21K |
| 32 | 膝关节右端盖改1.SLDPRT | 152.43K |
| 33 | 膝关节右端盖改3.SLDPRT | 172.86K |
| 34 | 膝关节左端盖.SLDDRW | 234.87K |
| 35 | 膝关节左端盖.SLDPRT | 182.51K |
| 36 | 膝关节左端盖1.SLDPRT | 179.22K |
| 37 | 膝关节盖1.SLDDRW | 210.58K |
| 38 | 膝关节盖1.SLDPRT | 145.42K |
| 39 | 膝关节盖11.SLDPRT | 144.31K |
| 40 | 膝关节盖2.SLDDRW | 175.64K |
| 41 | 膝关节盖2.SLDPRT | 120.30K |
| 42 | 膝关节盖21.SLDPRT | 119.43K |
| 43 | 膝关节连接件改.SLDPRT | 165.63K |
| 44 | 膝关节连接件改改.SLDDRW | 328.59K |
| 45 | 膝关节连接件改改.SLDPRT | 297.10K |
| 46 | 膝关节连接件改改1.SLDPRT | 279.43K |
| 47 | 装配体.SLDASM | 978.86K |
| 48 | 踝关节右端盖改.SLDPRT | 415.49K |
| 49 | 踝关节连接件改.SLDPRT | 160.39K |
| 50 | 踝关节连接件改改.SLDDRW | 278.78K |
| 51 | 踝关节连接件改改.SLDPRT | 229.49K |
| 52 | 踝关节连接件改改1.SLDPRT | 239.36K |
| 53 | 轴承35477.SLDPRT | 106.63K |
| 54 | 轴承709010.SLDPRT | 104.73K |
| 55 | 轴承8010010.SLDPRT | 112.31K |
| 56 | 轴承8144.SLDPRT | 113.17K |
| 57 | 连接杆.SLDDRW | 234.28K |
| 58 | 连接杆.SLDPRT | 218.91K |
| 59 | 连接杆1.SLDPRT | 216.38K |
| 60 | 零件板.SLDPRT | 152.42K |
| 61 | 零件板2.SLDPRT | 91.28K |
此图纸下载需要60金币
立即下载
发布者
机械小粤
创作: 905
粉丝: 94
加入时间:2023-06-17

模型信息
图纸格式:stp,sldprt,slddrw,sldasm
文件大小:21.38M
所需金币:60
上传时间:2024-07-18 12:06:41
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2018
标签
图纸简介
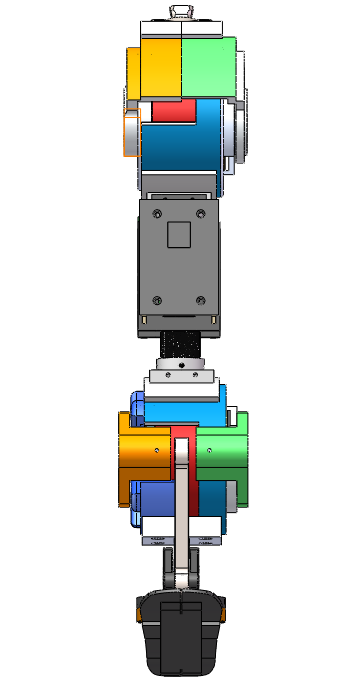
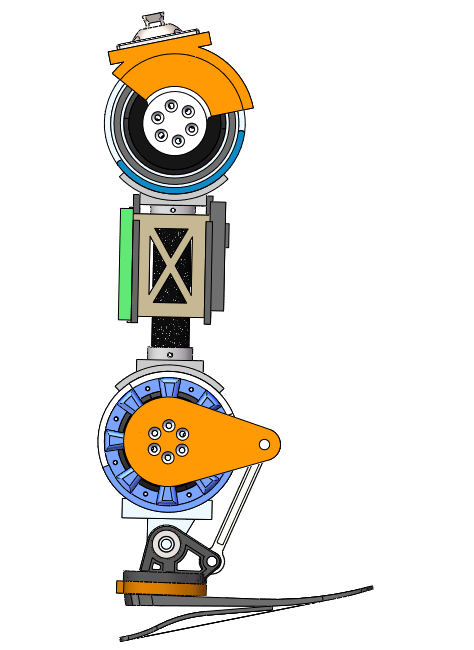
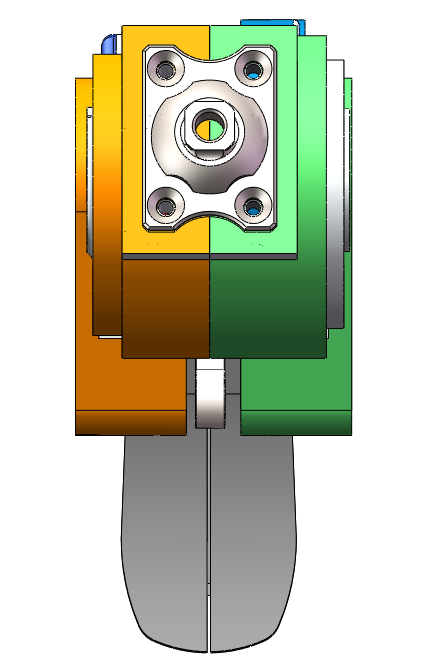
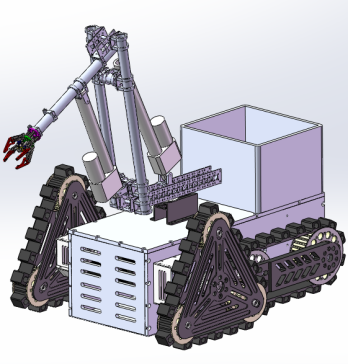
行走机器人腿部结构:采用类人的设计,腿部采用多电机进行驱动,实现自动行走,细节已经做到位,可以修改,如果感兴趣,也可以作为参考学习使用。该模型为sw2018版本包含七八张二维工程图
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
4.png)
0.png)
0.png)
0.png)
0.png)

