
登录注册
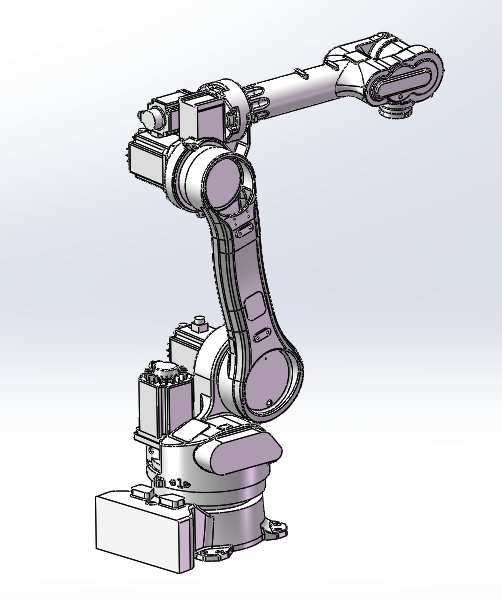
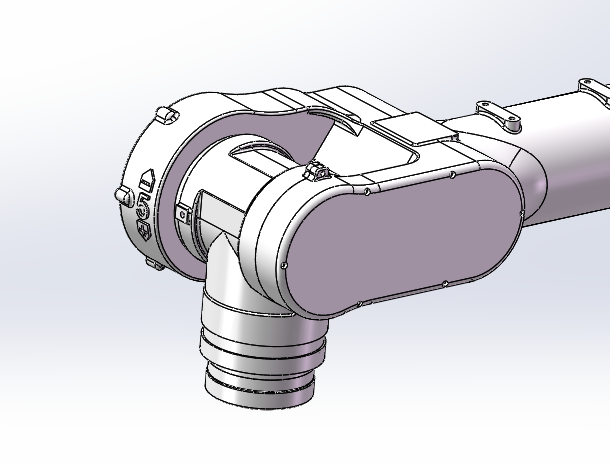
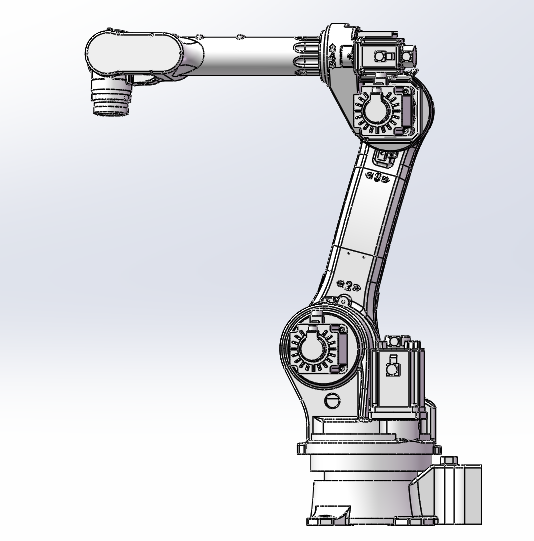
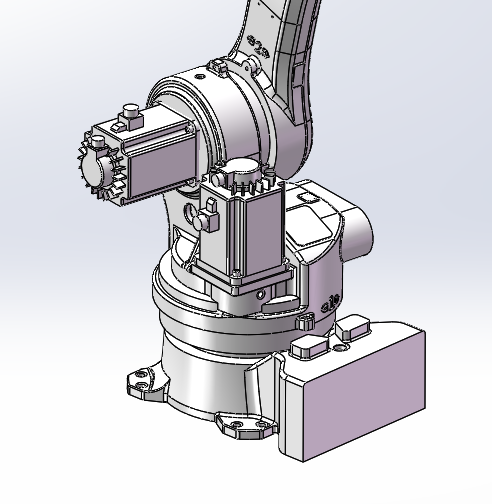
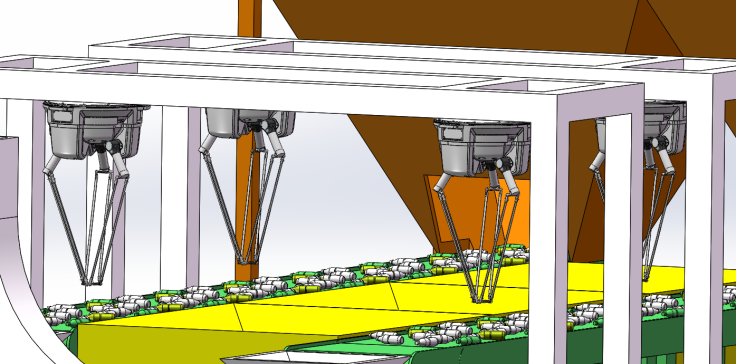
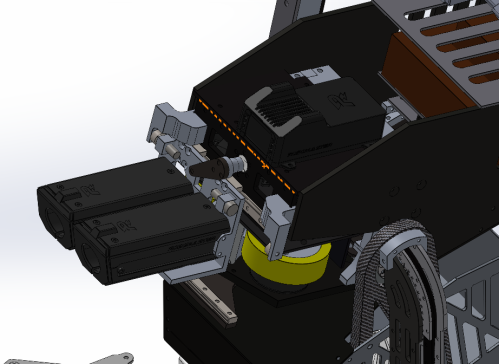
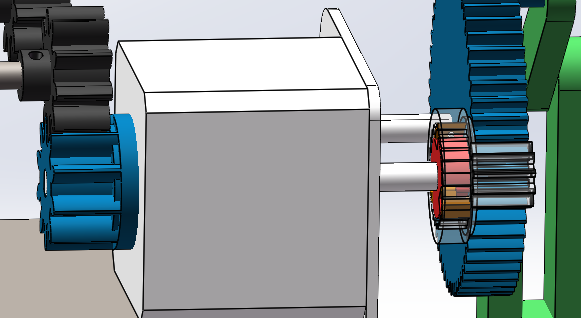
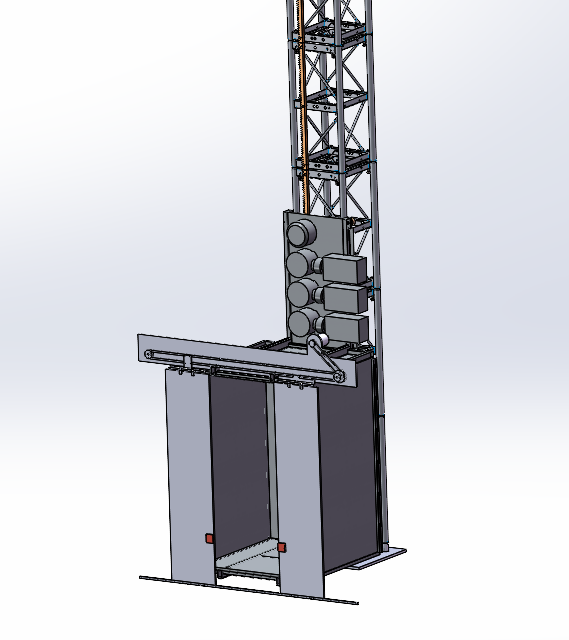
昌泓LJ2100-65机器人(ID:1510279)
0.png)
1.png)
2.png)
3.png)
4.png)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17224303496024.zip | 7.09M |
| 2 | 27bcb1c3066bec1e29fc401a12a18c1.png | 95.22K |
| 3 | 2b9054bdae1cf6e559a27f719858744.png | 106.04K |
| 4 | 416f6d4af16ea794ab9c3e6499ffd79.png | 123.29K |
| 5 | 464847dcfcf30f1d28bc388bdb444bb.png | 119.46K |
| 6 | 4f7d0c8f6699eb28295514d174856dc.png | 98.23K |
| 7 | LJ2100-65臂展2100负载65KG.x_t | 18.64M |
此图纸下载需要100金币
立即下载
发布者
仙人掌设计
创作: 334
粉丝: 21
加入时间:2022-11-04

模型信息
图纸格式:x_t
文件大小:7.26M
所需金币:100
上传时间:2024-07-31 20:52:32
是否可编辑:可修改,包括参数
版本:Parasolid
标签
图纸简介
工作空间大,运行速度快,重复定位精度高。高速稳定,全轴低功率输出,设备可在极短时间安装、示教、调试,机器人即可投入生产。负载:65kg,臂展:2100mm,重复定位精度:±0.05mm。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0_0_364.png)
0.png)
0.png)
0.png)
猜你喜欢
0.png)
0.jpg)
0.png)
0.jpg)
0_0_364.png)
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0_0_364.png)
0.png)
0.png)
0.png)

