
登录注册
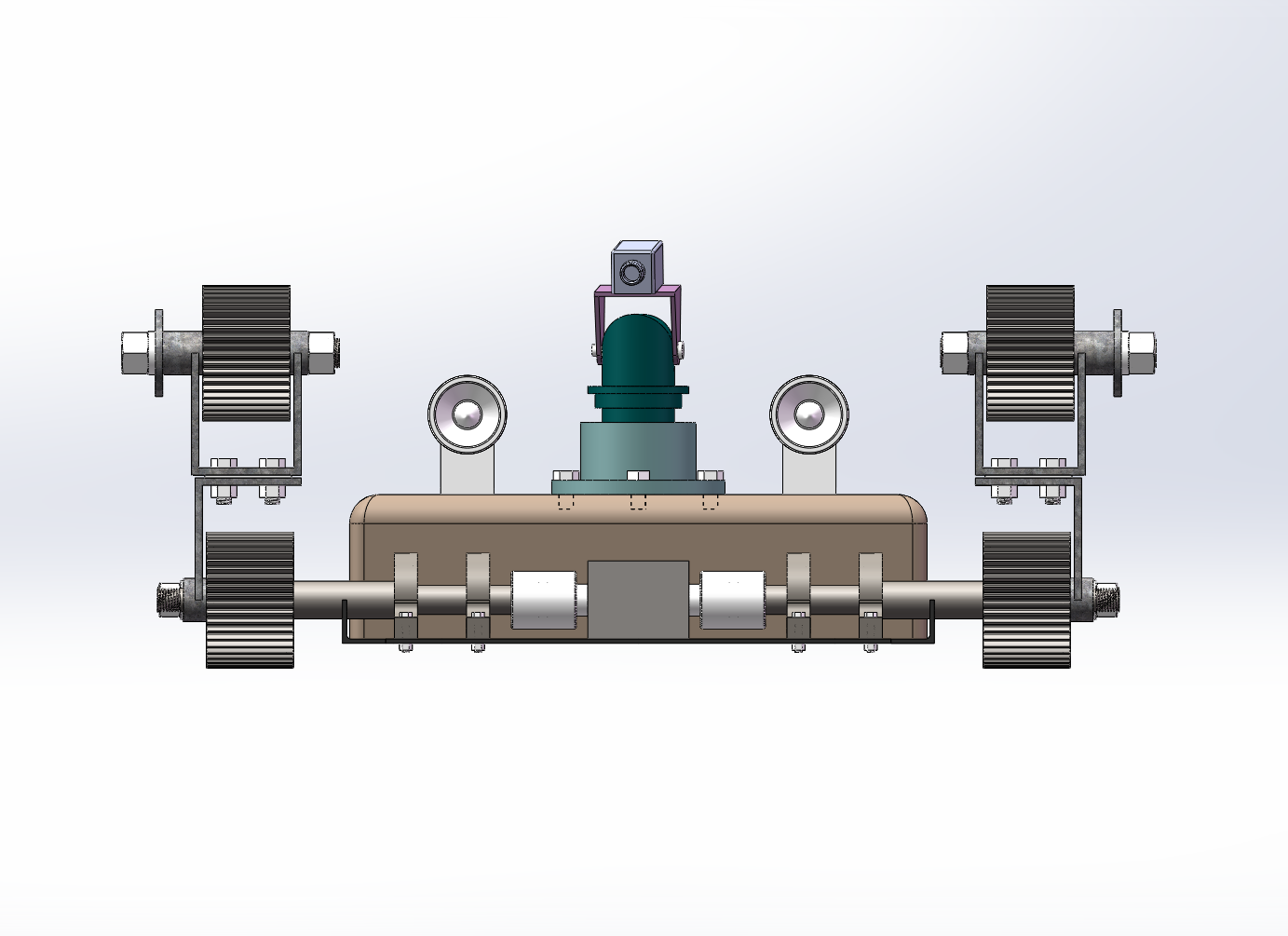
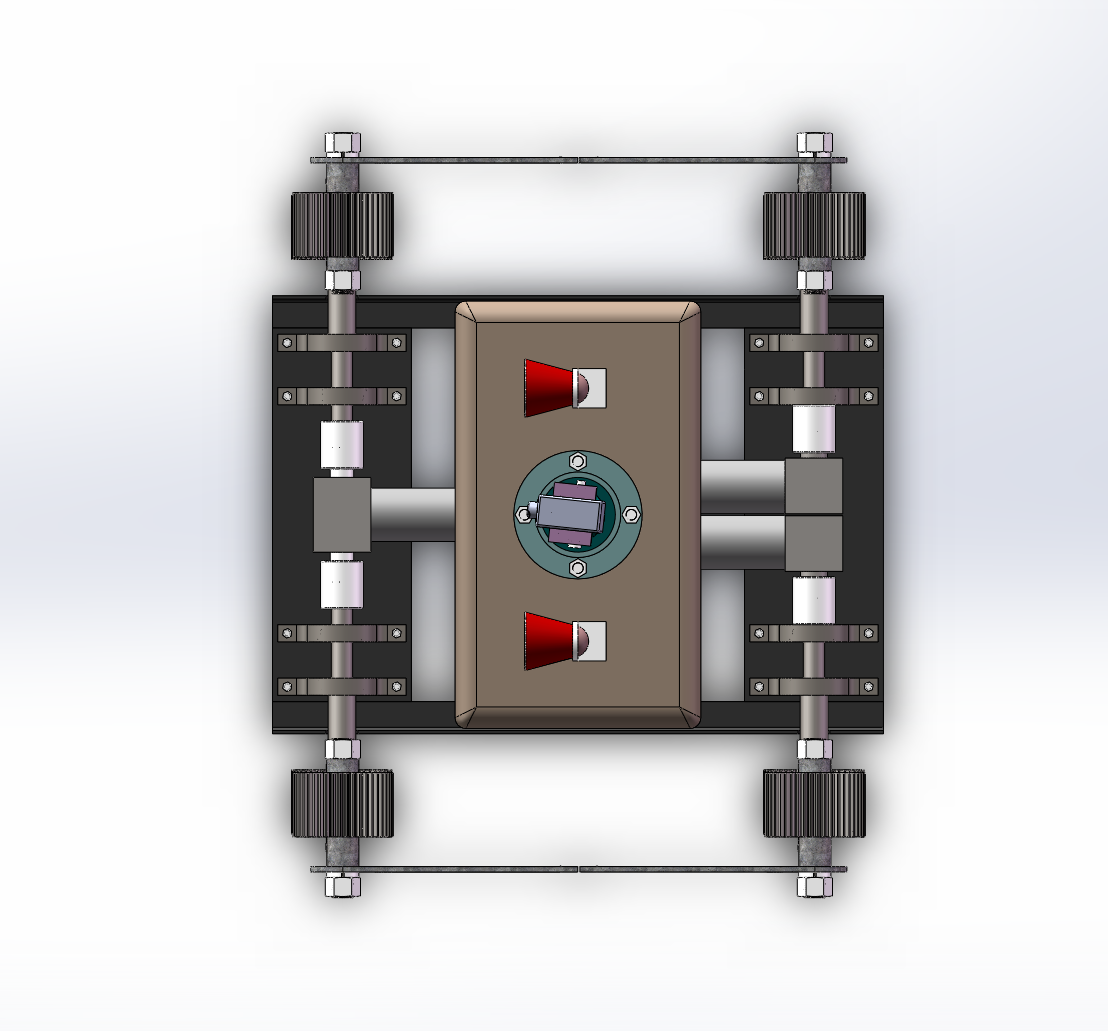
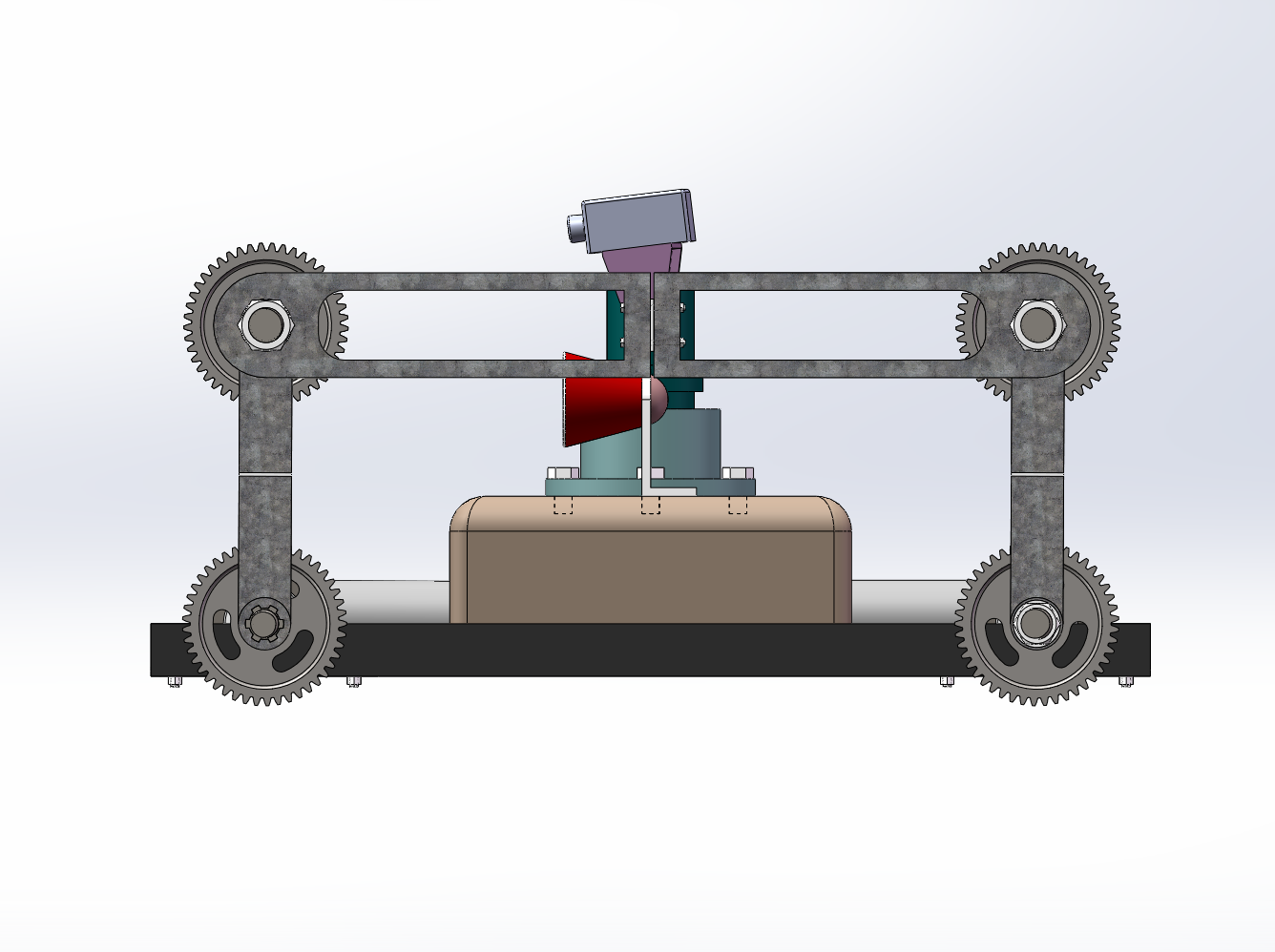
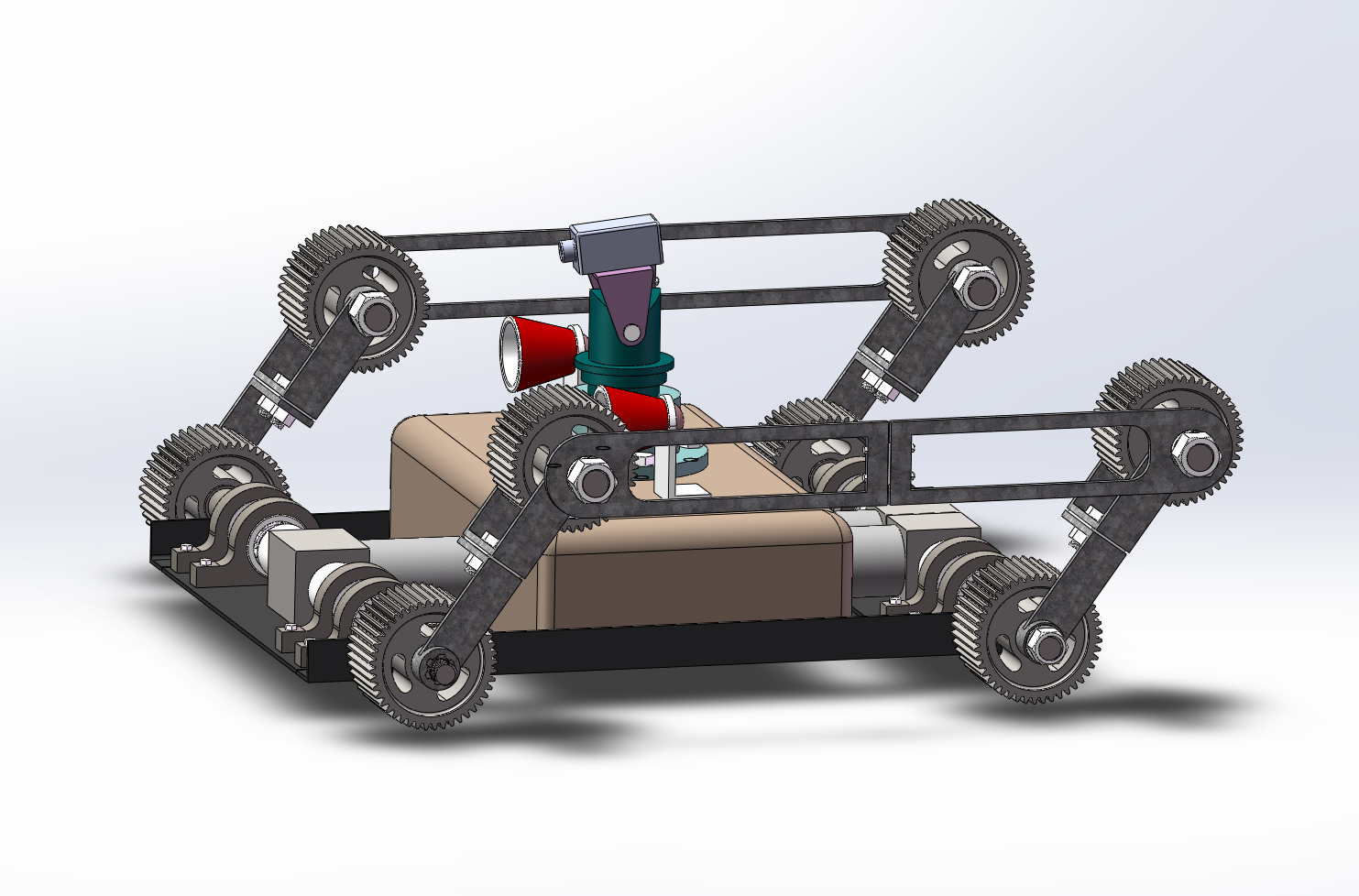
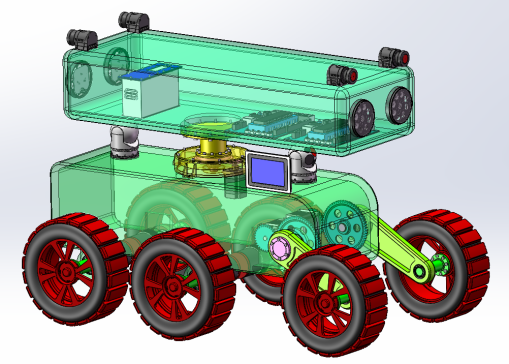
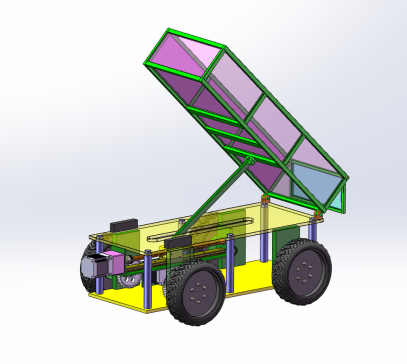
四连杆变形履带机器人(ID:1596765)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17275329681169.rar | 12.93M |
| 2 | 16垫圈.SLDPRT | 156.00K |
| 3 | 20垫圈.SLDPRT | 159.50K |
| 4 | 6204轴承.SLDASM | 781.50K |
| 5 | 6204轴承内圈.SLDPRT | 263.00K |
| 6 | 6204轴承外圈.SLDPRT | 273.00K |
| 7 | 6204轴承滚子.SLDPRT | 720.00K |
| 8 | M10螺栓.SLDPRT | 750.00K |
| 9 | M10螺母.SLDPRT | 155.00K |
| 10 | M16螺栓.SLDPRT | 192.50K |
| 11 | M20.SLDPRT | 192.50K |
| 12 | M3螺栓.SLDPRT | 961.00K |
| 13 | M3螺母.SLDPRT | 154.00K |
| 14 | M5螺栓.SLDPRT | 1.25M |
| 15 | M5螺母.SLDPRT | 155.50K |
| 16 | 主驱动轮.SLDPRT | 947.00K |
| 17 | 云台底座.SLDPRT | 192.50K |
| 18 | 减速机.SLDPRT | 217.00K |
| 19 | 减速机轴头.SLDPRT | 227.00K |
| 20 | 前轮转轴.SLDPRT | 486.00K |
| 21 | 副减速机模型.SLDPRT | 164.50K |
| 22 | 后轮转轴.SLDPRT | 483.50K |
| 23 | 四连杆变形履带机器人.SLDASM | 5.13M |
| 24 | 回转台.SLDPRT | 232.50K |
| 25 | 垫圈.SLDPRT | 149.00K |
| 26 | 导向轮.SLDPRT | 916.00K |
| 27 | 控制箱.SLDPRT | 271.00K |
| 28 | 摄像头.SLDPRT | 248.00K |
| 29 | 摄像头固定轴.SLDPRT | 168.00K |
| 30 | 支撑架.SLDPRT | 391.00K |
| 31 | 曲柄1.SLDPRT | 275.00K |
| 32 | 曲柄2.SLDPRT | 229.00K |
| 33 | 曲柄3.SLDPRT | 285.50K |
| 34 | 机架-底板.SLDPRT | 197.50K |
| 35 | 机架-角铁.SLDPRT | 207.00K |
| 36 | 灯.SLDPRT | 291.00K |
| 37 | 电机模型.SLDPRT | 146.50K |
| 38 | 联轴器.SLDPRT | 242.00K |
| 39 | 调整垫片1.SLDPRT | 170.00K |
| 40 | 调整垫片2.SLDPRT | 169.50K |
| 41 | 轴1.SLDPRT | 849.00K |
| 42 | 轴承座.SLDPRT | 203.00K |
| 43 | 连杆1.SLDPRT | 216.00K |
| 44 | 连杆2.SLDPRT | 216.50K |
| 45 | 键.SLDPRT | 155.00K |
此图纸下载需要300金币
立即下载
发布者
机械与液压(原创) +V:o627951491
创作: 676
粉丝: 64
加入时间:2023-10-23
模型信息
图纸格式:sldprt,sldasm
文件大小:13.24M
所需金币:300
上传时间:2024-09-28 22:18:27
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2013
标签
图纸简介
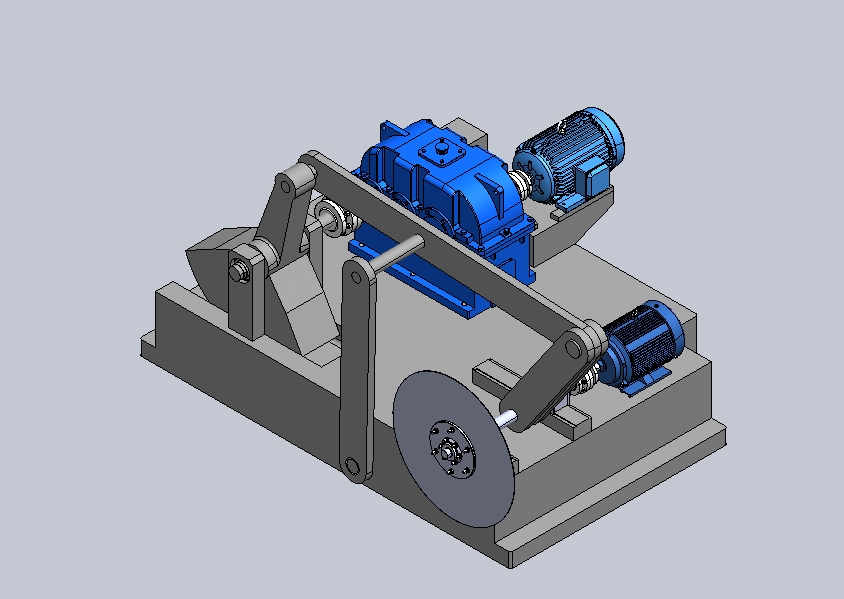
四连杆变形履带机器人巧妙利用平行四边形机构构型变化总长不变的特点,提出一种全新的履带变形机器人移动平台,具有很强的越障、爬坡、地面机动能力和行驶平顺性,且结构简单、运动稳定、控制可靠,可适应复杂地形环境,满足反恐、排爆、搜索、救援、侦察等任务对微小灵巧移动机器人载体的需求。 该作品的创新点主要有以下几点: 1. 提出新型履带变形机构,巧妙利用平行四边形机构构型发生变化总长不变的特点,使履带变形的运动控制变得非常简单。 2 .机器人移动平台可实现多种姿态,抬高底盘越过障碍,单边提高机器人重心适应单边地形,翻倒后可继续行进,具有很强的越沟、爬坡、越障功能。 3.该移动平台的运动非常平稳,有利于机器
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

