登录注册
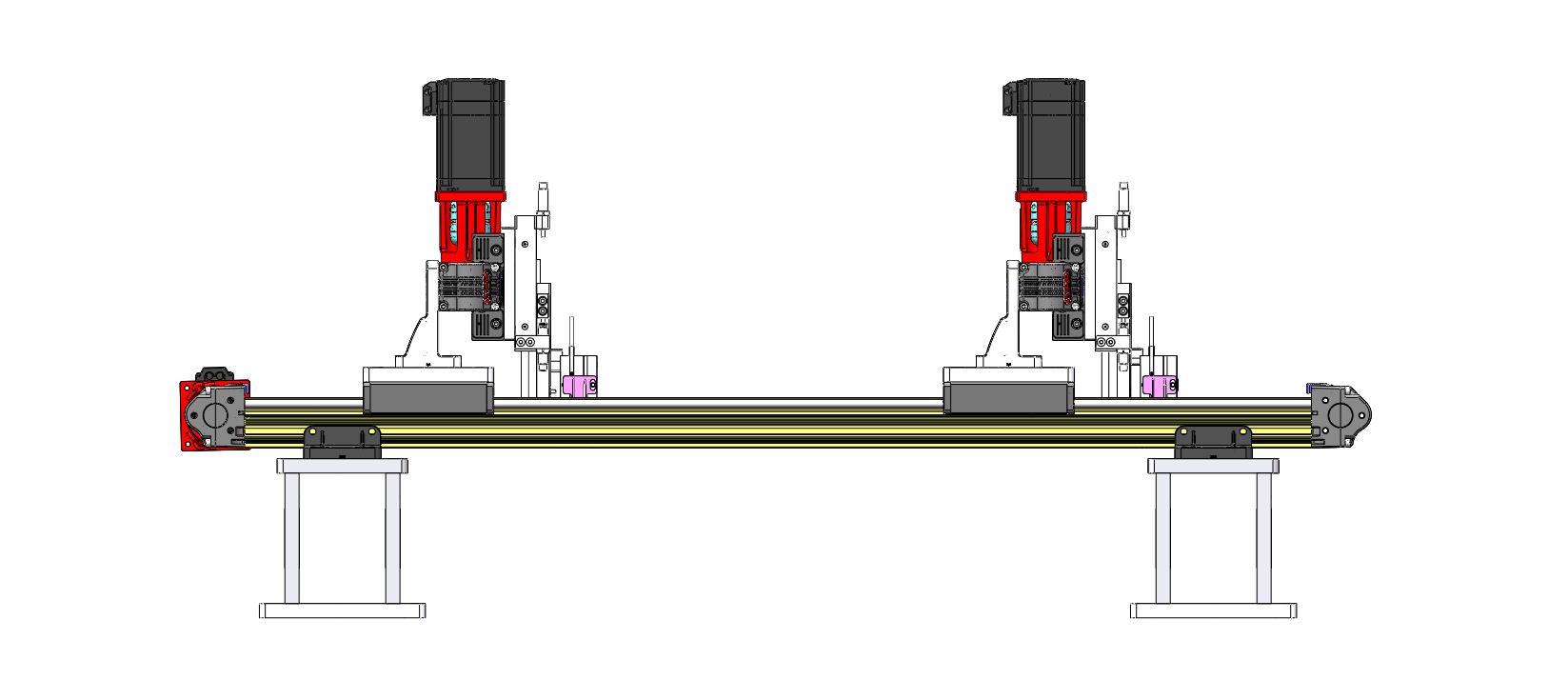
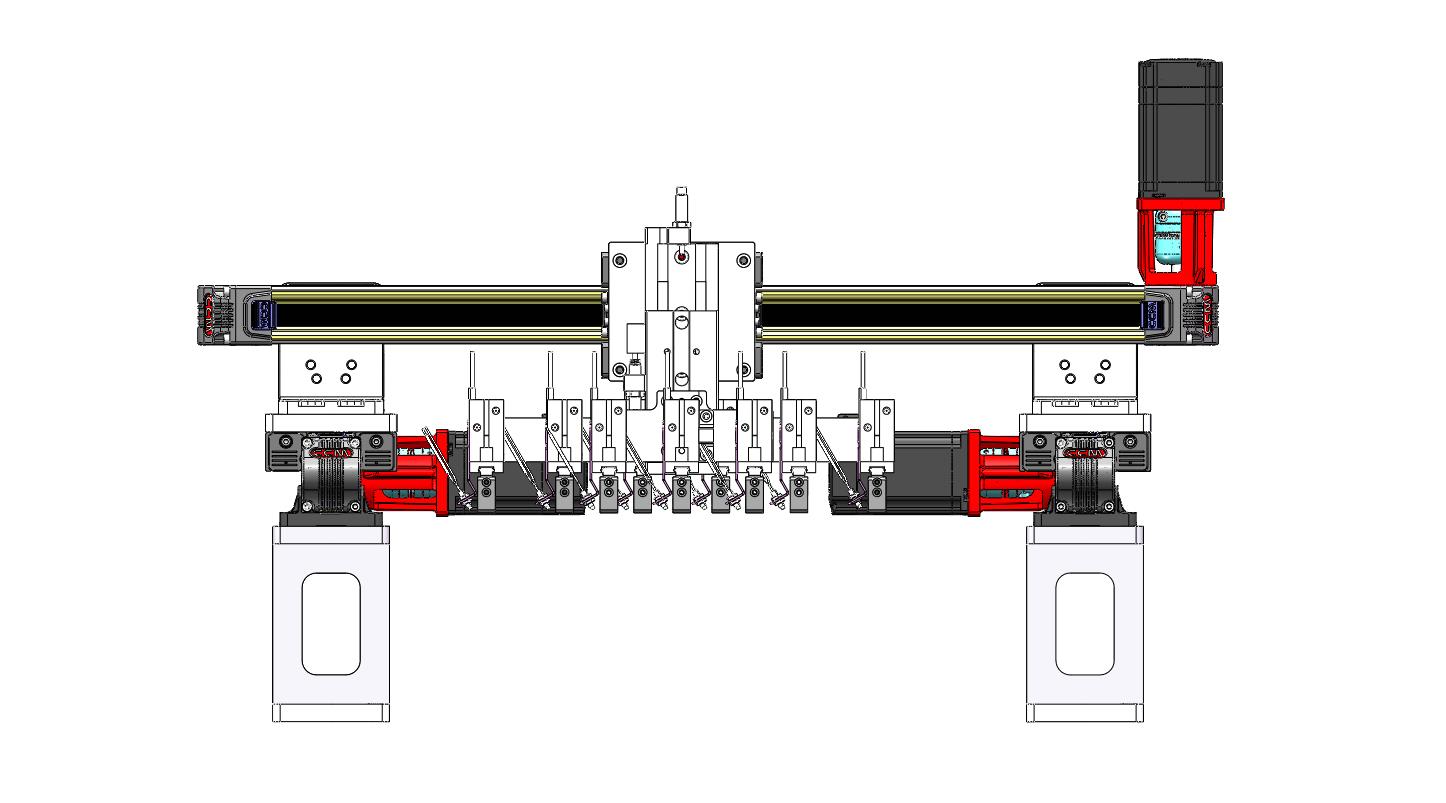
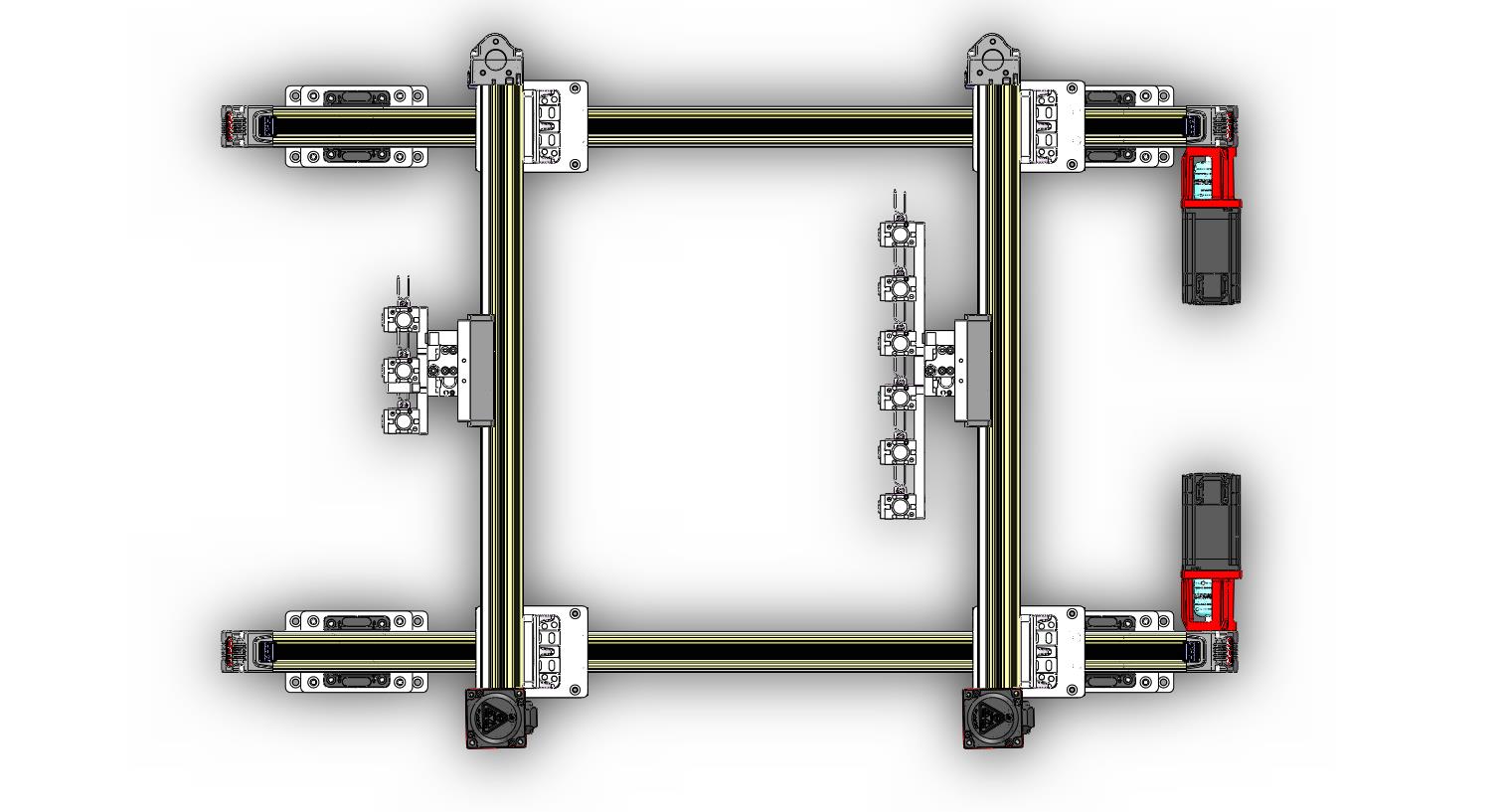
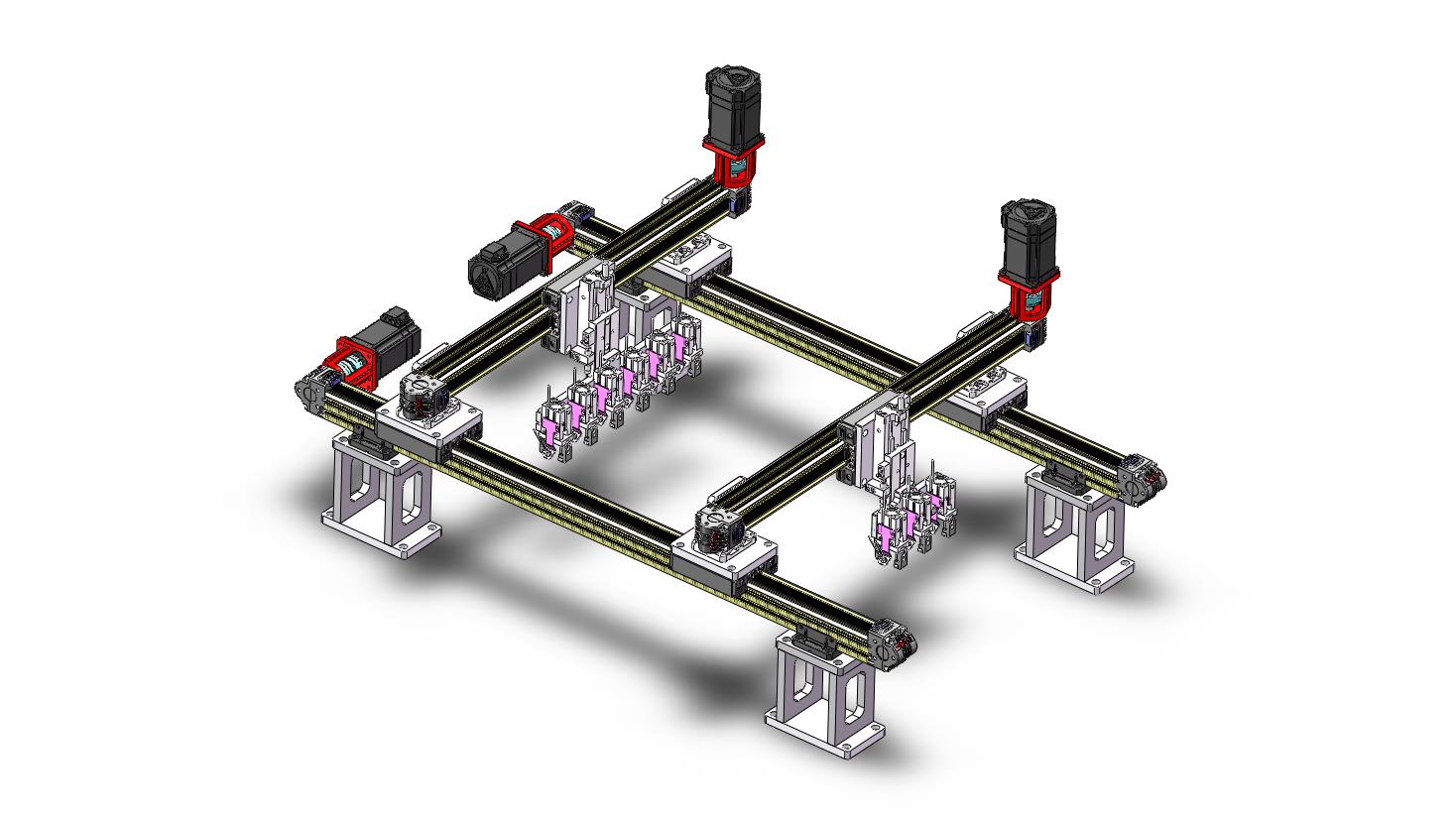
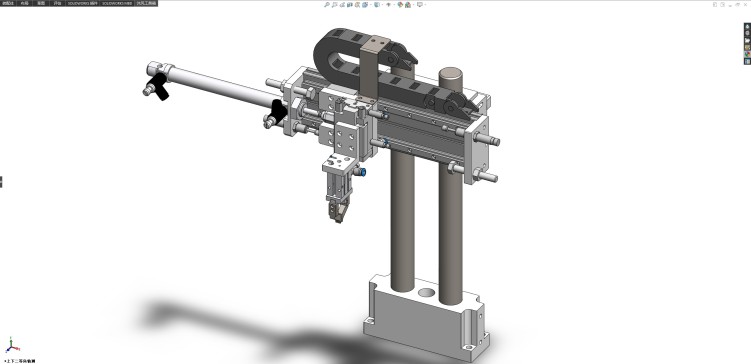
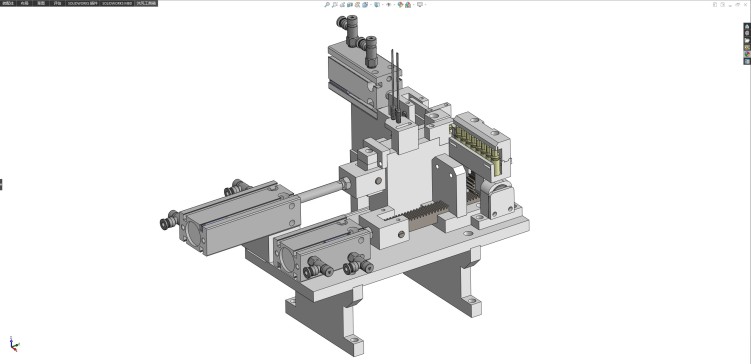
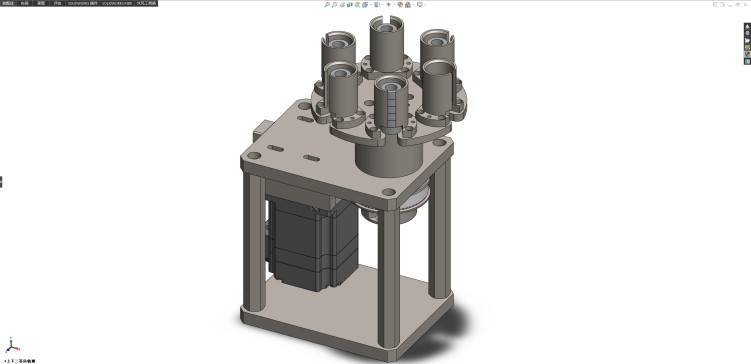
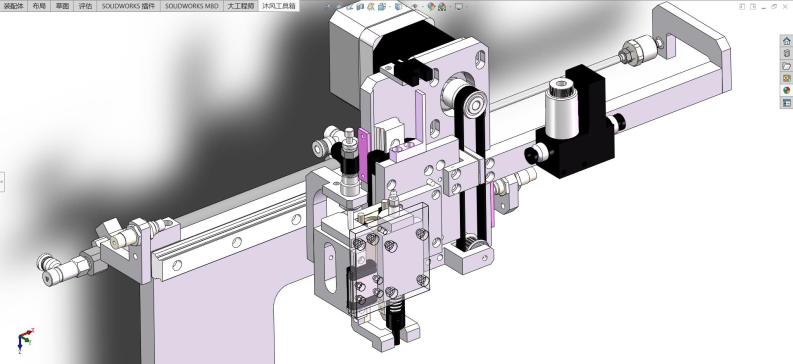
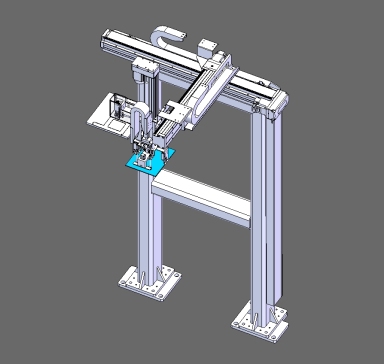
双Y轴移载机械手(ID:1716144)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 120801-001.sldprt | 25.03K |
| 2 | 120801-002.sldprt | 22.27K |
| 3 | 120801-003.sldprt | 26.00K |
| 4 | 120801-004.sldprt | 25.61K |
| 5 | 120801-005.sldprt | 25.34K |
| 6 | 120801-006.sldprt | 20.72K |
| 7 | 120801-007.sldprt | 29.51K |
| 8 | 120801-008.sldprt | 43.47K |
| 9 | 120801-009.sldprt | 25.96K |
| 10 | 120801-010.sldprt | 37.75K |
| 11 | 120801-011.sldprt | 27.24K |
| 12 | 120801-100.sldasm | 43.69K |
| 13 | 120801-200.sldasm | 42.10K |
| 14 | 17342614094667.zip | 28.05M |
| 15 | AirTAC导轨气缸HLQ12X50SBCMSH-1.sldasm | 34.35K |
| 16 | AirTAC导轨气缸HLQ12X50SBCMSH.sldasm | 34.69K |
| 17 | AirTAC气动手指HFZ16CMSH-1.sldasm | 34.34K |
| 18 | AirTAC气动手指HFZ16CMSH-2.sldasm | 33.41K |
| 19 | AirTAC气动手指HFZ16CMSH-3.sldasm | 33.71K |
| 20 | AirTAC气动手指HFZ16CMSH-4.sldasm | 34.17K |
| 21 | AirTAC气动手指HFZ16CMSH-5.sldasm | 33.14K |
| 22 | AirTAC气动手指HFZ16CMSH-6.sldasm | 33.99K |
| 23 | AirTAC气动手指HFZ16CMSH-7.sldasm | 33.52K |
| 24 | AirTAC气动手指HFZ16CMSH-8.sldasm | 33.66K |
| 25 | AirTAC气动手指HFZ16CMSH.sldasm | 34.24K |
| 26 | CCM线性模组W40-10-L100001.sldasm | 38.07K |
| 27 | CCM线性模组W40-10-L100002.sldasm | 37.41K |
| 28 | CCM线性模组W40-10-L700.sldasm | 5.60M |
| 29 | HFZ16CMSH01.sldprt | 26.30K |
| 30 | HFZ16CMSH02.sldprt | 26.70K |
| 31 | HFZ16CMSH03.sldprt | 24.56K |
| 32 | HFZ16CMSH04.sldprt | 60.37K |
| 33 | HLQ12X50SBCMSH01.sldprt | 25.24K |
| 34 | HLQ12X50SBCMSH02.sldprt | 92.24K |
| 35 | HLQ12X50SBCMSH03.sldprt | 128.91K |
| 36 | Panasonic光纤传感器FD-41.sldprt | 39.33K |
| 37 | W40-10001.sldprt | 111.22K |
| 38 | W40-10002.sldprt | 805.23K |
| 39 | W40-10003.sldprt | 810.75K |
| 40 | W40-10004.sldprt | 533.17K |
| 41 | W40-10005.sldprt | 235.12K |
| 42 | W40-10006.sldprt | 320.12K |
| 43 | W40-10007.sldprt | 111.36K |
| 44 | W40-10008.sldprt | 805.13K |
| 45 | W40-10009.sldprt | 806.92K |
| 46 | W40-10010.sldprt | 530.19K |
| 47 | W40-10011.sldprt | 111.58K |
| 48 | W40-10012.sldprt | 805.22K |
| 49 | W40-10013.sldprt | 804.70K |
| 50 | W40-10014.sldprt | 531.41K |
| 51 | W40-10015.sldprt | 388.98K |
| 52 | 双Y轴移载机械手.SLDASM | 12.72M |
| 53 | 圆角联轴器Φ12-Φ8-Φ34.sldprt | 159.77K |
| 54 | 雷塞步进电机57CME23.sldprt | 1.44M |
此图纸下载需要30金币
立即下载
发布者
幻现时空
创作: 97
粉丝: 7
加入时间:2024-12-15

模型信息
图纸格式:sldprt,sldasm
文件大小:28.73M
所需金币:30
上传时间:2024-12-15 19:17:34
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2018
标签
龙门机械手
双Y轴结构
图纸简介
双Y轴龙门机械手的工作原理基于精密的伺服控制系统。通过预先编程或实时控制,伺服电机可以精确地驱动X轴和Y轴的运动,从而实现机械手在空间中的精确定位和移动。控制系统通常包括传感器、编码器等反馈元件,用于实时监测机械手的位置和速度,并进行必要的调整以确保精度和稳定性。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)