登录注册
两款工业机器抓爪(ID:440918)



| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | .两款工业机器抓爪.SLDASM | 7.32M |
| 2 | 1016_calerlt_Defaut.sldprt | 47.50K |
| 3 | 16718712151102.zip | 30.65M |
| 4 | Base.sldasm | 23.47K |
| 5 | bearing_1000804_2RS.sldprt | 47.50K |
| 6 | bearing_cover.sldprt | 64.50K |
| 7 | big_cone.sldprt | 48.50K |
| 8 | Component11.sldprt | 49.00K |
| 9 | Component11Mirror.sldprt | 49.00K |
| 10 | Component12.sldprt | 59.00K |
| 11 | Component12Mirror1.sldprt | 61.50K |
| 12 | Component14.sldprt | 153.70K |
| 13 | Component15.sldprt | 73.50K |
| 14 | Component19.sldprt | 50.50K |
| 15 | Component19Mirror.sldprt | 50.50K |
| 16 | Component22.sldprt | 53.00K |
| 17 | Component23.sldprt | 46.50K |
| 18 | Component26.sldprt | 49.50K |
| 19 | Component28.sldprt | 49.50K |
| 20 | Component29.sldprt | 55.00K |
| 21 | Component31.sldprt | 48.50K |
| 22 | Component33.sldprt | 60.00K |
| 23 | Component33Mirror.sldprt | 60.00K |
| 24 | Component34.sldprt | 53.00K |
| 25 | Component34Mirror.sldprt | 53.00K |
| 26 | Component35.sldprt | 60.00K |
| 27 | Component35Mirror.sldprt | 60.00K |
| 28 | Component39.sldprt | 91.00K |
| 29 | Component40.sldprt | 48.50K |
| 30 | Component40Mirror.sldprt | 48.50K |
| 31 | Component42.sldprt | 52.50K |
| 32 | Component42Mirror.sldprt | 52.50K |
| 33 | Component44.sldprt | 61.00K |
| 34 | connector_m.sldasm | 27.90K |
| 35 | contact_body.sldprt | 49.50K |
| 36 | contact_frame.sldprt | 60.00K |
| 37 | contact_isolator.sldprt | 48.50K |
| 38 | contact_isolator_2.sldprt | 49.00K |
| 39 | contact_support_1.sldprt | 49.50K |
| 40 | contact_support_2.sldprt | 49.50K |
| 41 | disposablecoffeecup.sldasm | 102.45K |
| 42 | disposablecoffeecup_1.sldprt | 134.20K |
| 43 | Fingerleft.sldasm | 26.23K |
| 44 | Fingerright.sldasm | 26.47K |
| 45 | gearlink.sldprt | 214.00K |
| 46 | grip.sldprt | 325.00K |
| 47 | GT2_16T_5mmBore.sldprt | 99.00K |
| 48 | INDUSTRIALROBOTICGRIPPER_v5.SLDASM | 6.86M |
| 49 | Linch_Pins_DIN11023_D_4.0.sldprt | 52.50K |
| 50 | link4.sldprt | 140.50K |
| 51 | mainbody.sldprt | 318.50K |
| 52 | main_holder.sldprt | 53.50K |
| 53 | MechanicalGripper.SLDASM | 554.05K |
| 54 | NovelGear.sldprt | 11.47M |
| 55 | Novelworm.sldprt | 585.50K |
| 56 | pin.sldprt | 49.50K |
| 57 | psb.sldprt | 49.00K |
| 58 | RDM2408.sldprt | 152.00K |
| 59 | RMD-s-7010.sldprt | 51.50K |
| 60 | screw_郷1_.sldprt | 57.00K |
| 61 | shaft8x0.8.sldprt | 185.50K |
| 62 | shaft8x125.sldprt | 172.00K |
| 63 | small_cone.sldprt | 48.50K |
| 64 | spring_6x05.sldprt | 56.50K |
| 65 | step_motor.sldprt | 55.00K |
| 66 | support_nut.sldprt | 67.00K |
| 67 | _main_source_module.sldasm | 31.49K |
| 68 | 电机.sldprt | 1.00M |
| 69 | 腕部基体.sldprt | 173.65K |
| 70 | 转腕轴承16.sldprt | 113.97K |
| 71 | 转腕轴承40.sldprt | 182.43K |
| 72 | 轴承10x26x8.sldprt | 214.64K |
| 73 | 轴承6x17x6.sldprt | 186.44K |
| 74 | 销轴3_0.sldprt | 24.54K |
| 75 | 销轴4_5.sldprt | 24.65K |
| 76 | 销钉2_0.sldprt | 24.01K |
此图纸下载需要60金币
立即下载
发布者
地瓜炖土豆
创作: 118
粉丝: 28
加入时间:2022-10-20

模型信息
图纸格式:sldasm,sldprt
文件大小:31.39M
所需金币:60
上传时间:2022-12-24 16:40:28
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2016
标签
机器人抓爪
机器人夹具
图纸简介
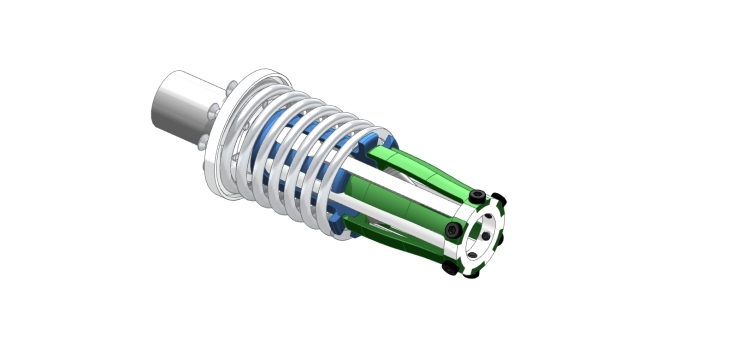
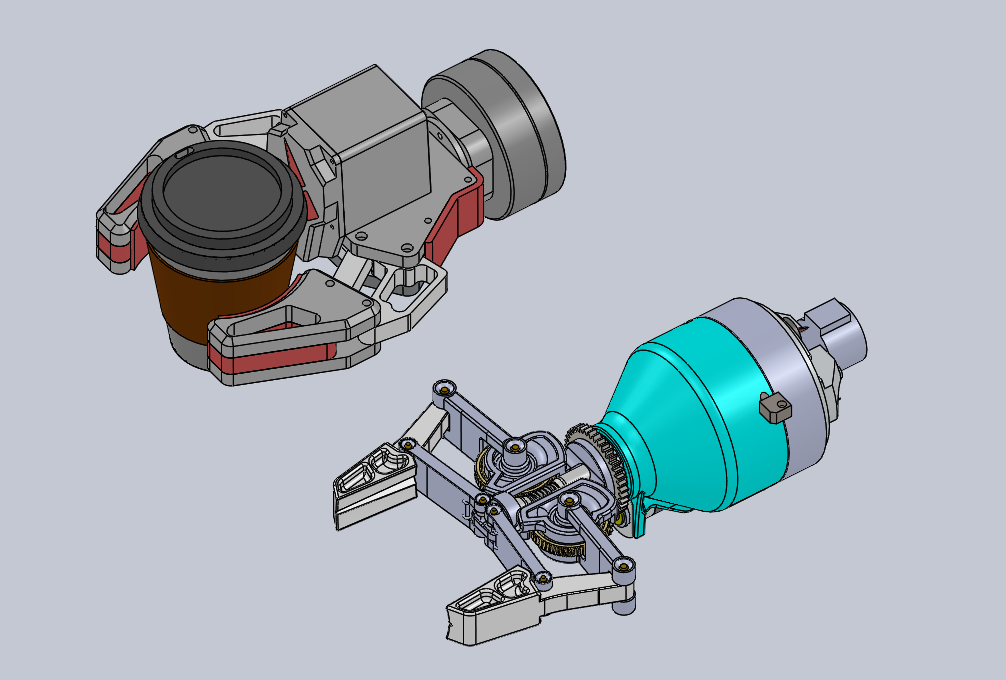
两种工业机器人抓爪的SolidWorks2016版模型。这两种抓爪可以装在工业用六自由度机器人的末端,用于搬运、精确夹持精密物品。夹爪的开合都是通过电机驱动,一种是电机通过蜗轮蜗杆机构驱动夹爪开合,另一种电机通过丝杆驱动抓爪开合。都能精确控制开合的尺寸。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)

1.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.jpg)
0.jpg)
0.png)
0.png)
0.jpg)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)