
登录注册
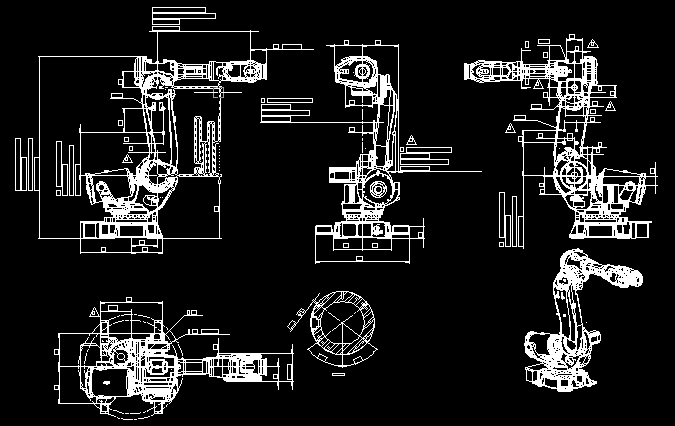
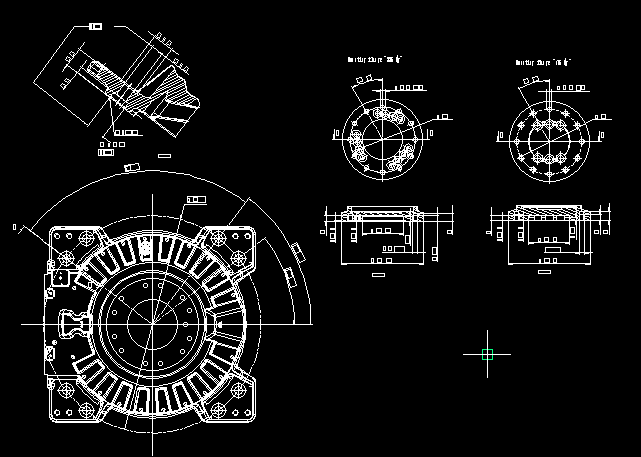
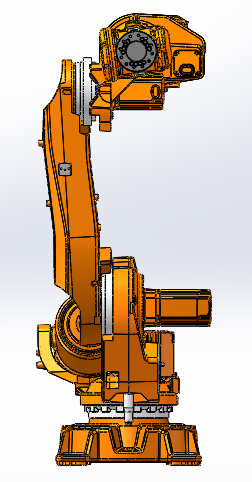
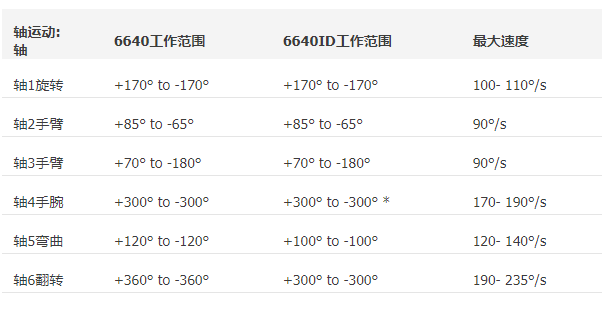
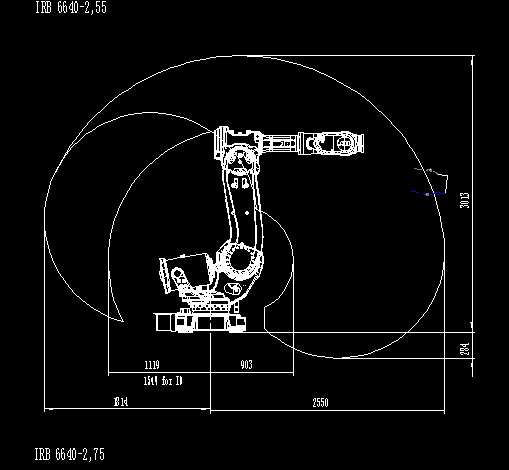
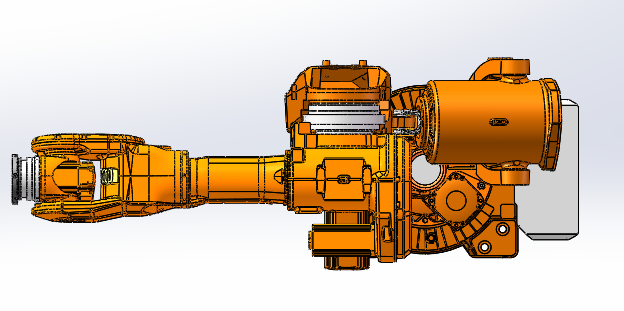
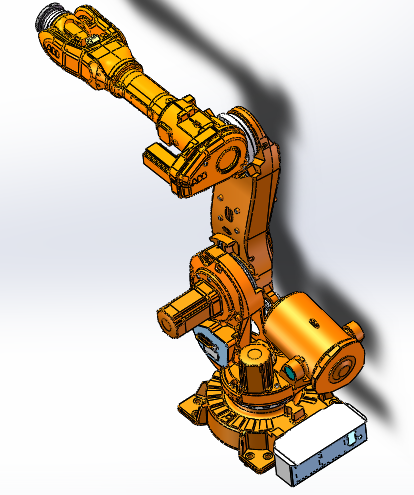
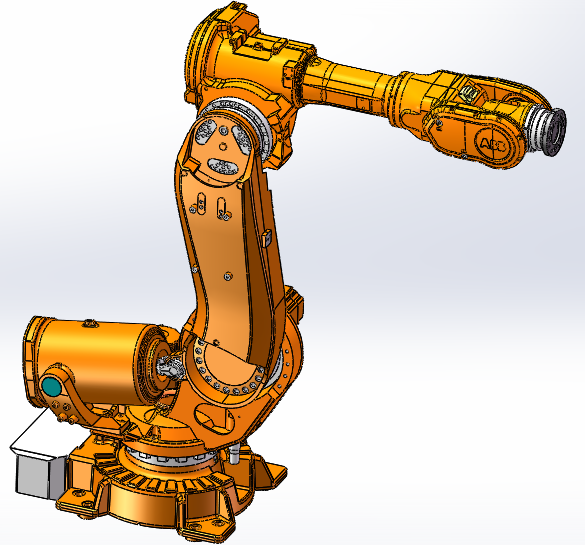
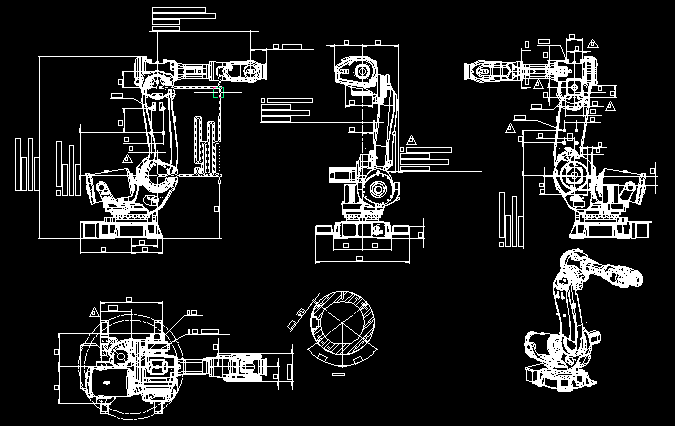
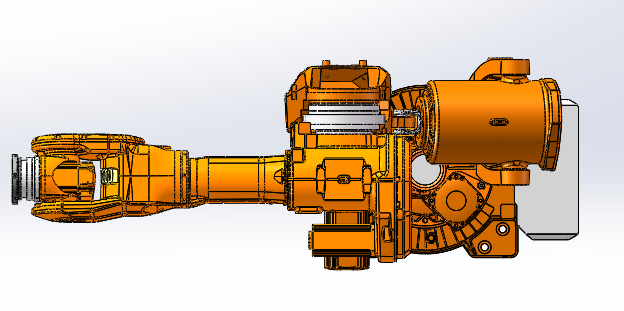
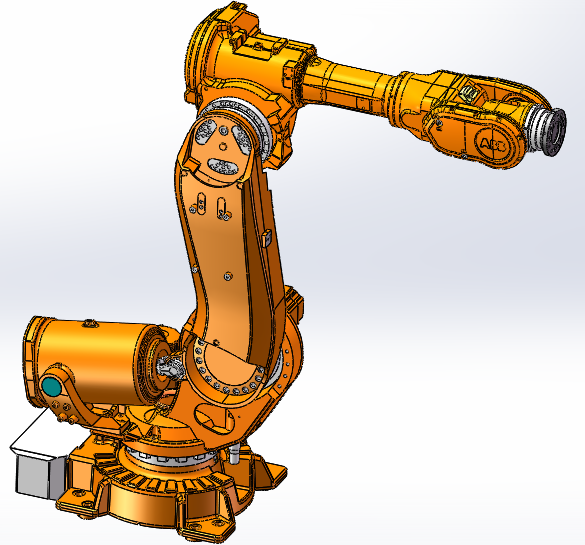
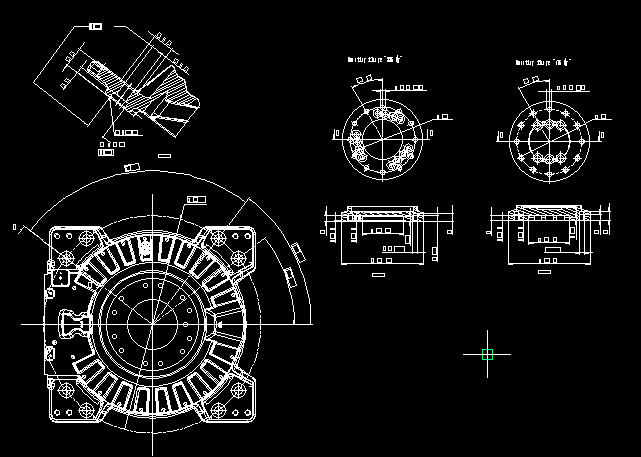
ABB irb6640-235-2550六轴关节机器人(ID:700034)

0.png)
1.png)
2.png)
3.png)
4.png)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16926242725277.zip | 93.02M |
| 2 | IRB6640-235-2550.IGS | 129.45M |
| 3 | IRB6640-235-2550.STEP | 68.12M |
| 4 | irb6640二维图.png | 24.68K |
| 5 | irb6640俯视图.png | 98.68K |
| 6 | IRB6640全局图.png | 179.74K |
| 7 | irb6640基座和法兰二维图.png | 24.50K |
| 8 | IRB6640法兰式图.png | 70.80K |
| 9 | irb6640视图.png | 147.43K |
| 10 | irb6640运动区域二维图.png | 13.16K |
| 11 | IRB6640运动区域图.png | 11.73K |
| 12 | 内容图.png | 107.92K |
| 13 | 说明.txt | 1.04K |
| 14 | IRB6640-235-2550.dwg | 2.72M |
| 15 | IRB6640-235-2550.dxf | 11.38M |
| 16 | irb6640-235-2550基座和法兰图.dwg | 499.19K |
| 17 | irb6640-235-2550基座和法兰图.dxf | 1.63M |
| 18 | IRB6640运动区域.dwg | 3.33M |
| 19 | IRB6640运动区域.dxf | 13.78M |
| 20 | IRB6640-235-2550.SLDASM | 10.82M |
| 21 | irb6640_235_255__01_LINK5.SLDPRT | 1.07M |
| 22 | irb6640_235_255__01_LINK6.SLDPRT | 551.76K |
| 23 | irb6640_KG_255__01_LINK3.SLDPRT | 5.55M |
| 24 | irb6640_KG_255__01_LINK4.SLDPRT | 3.52M |
| 25 | irb6640_KG_255__02_Link2.SLDPRT | 2.85M |
| 26 | irb6640_KG_M__02_BASE.SLDPRT | 2.76M |
| 27 | irb6640_KG_M__02_CYLINDER.SLDPRT | 708.56K |
| 28 | irb6640_KG_M__02_LINK1.SLDPRT | 5.87M |
| 29 | irb6640_KG_M__02_PISTON.SLDPRT | 1.01M |
此图纸下载需要45金币
立即下载
发布者
whqq
创作: 436
粉丝: 14
加入时间:2023-07-02

模型信息
图纸格式:igs,step,dwg,dxf,sldasm,sldprt
文件大小:95.25M
所需金币:45
上传时间:2023-08-21 21:25:16
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2016
标签
ABB
irb6640
工业机器人
三维模型
机械
图纸简介
产品简介
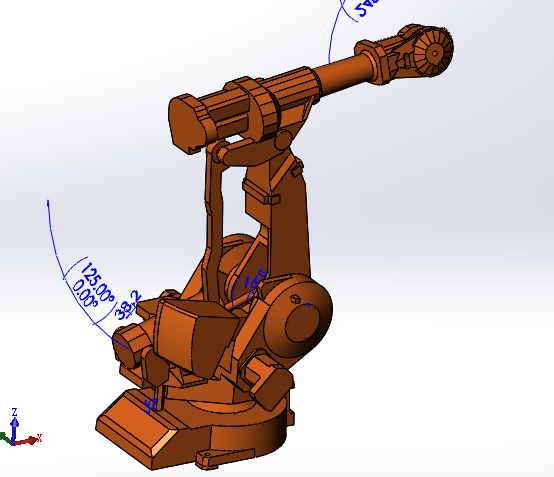
一、产品型号:
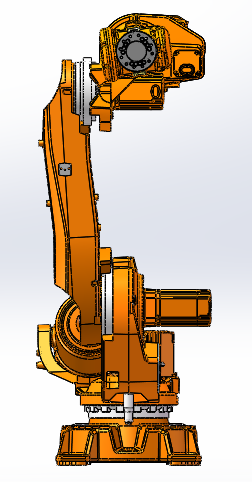
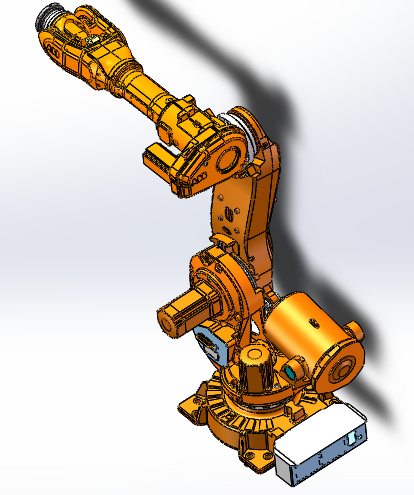
IRB6640工业机器人
二、产品用途:
用于物料搬运、机床管理、点焊。
三、性能特点:
IRB6640是机器人家族中更强壮的新一代机器人,是一款高产能且适合各类应用的机器人产品。
高生产效率,紧凑型设计,维护保养简单使IRB6640成为可应用于多种领域的最佳机器人!
更长的上臂配合多种手腕形式使IRB6640能够适应多种工艺过程。
不同版本的sw打开后配合可能会出问题,自己调整重新选择配合的基准即可,已有配合无法保证百分百可用。
文件可以保证完整打开,且提供有中性格式的文件。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)

0.png)

猜你喜欢
0.png)
0.png)
0.jpg)
0.png)
0.jpg)
0.png)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)

