
登录注册
自动上下料5自由度机械手(ID:739411)

0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16971874012274.rar | 16.19M |
| 2 | dabi.prt | 476.00K |
| 3 | dabiqigang.prt | 494.00K |
| 4 | dabiqigangban.prt | 264.00K |
| 5 | dabiqiganggan.prt | 156.00K |
| 6 | dabitao.prt | 200.00K |
| 7 | diban.prt | 292.00K |
| 8 | FEI.prt | 220.20K |
| 9 | jiegou.prt | 124.00K |
| 10 | lianjieban.prt | 564.00K |
| 11 | lianjiesanjiaoban.prt | 1.59M |
| 12 | luo10-30.prt | 192.00K |
| 13 | luo12-45.prt | 216.00K |
| 14 | luo16-40.prt | 196.00K |
| 15 | luo18-55.prt | 172.00K |
| 16 | luo30.prt | 216.00K |
| 17 | luo5-20.prt | 200.00K |
| 18 | luo8-20.prt | 220.00K |
| 19 | luo8-40.prt | 192.00K |
| 20 | luo8-60.prt | 280.00K |
| 21 | luom10.prt | 172.00K |
| 22 | luom12.prt | 172.00K |
| 23 | luom18.prt | 172.00K |
| 24 | luom30.prt | 264.00K |
| 25 | luom8.prt | 196.00K |
| 26 | model1.prt | 108.00K |
| 27 | model2.prt | 192.00K |
| 28 | model3.prt | 256.00K |
| 29 | shoubu.prt | 248.00K |
| 30 | shoubu1.prt | 648.00K |
| 31 | shoubu2.prt | 804.00K |
| 32 | shoubuzhuangpei.prt | 108.00K |
| 33 | shouli.prt | 1.72M |
| 34 | shouzhuan.prt | 192.00K |
| 35 | wanbu.prt | 296.00K |
| 36 | wanbu1.prt | 556.00K |
| 37 | wanbulianshou.prt | 320.00K |
| 38 | wanbumao.prt | 88.00K |
| 39 | wanliangan.prt | 328.00K |
| 40 | xiaobi.prt | 328.00K |
| 41 | xiaobiqigang.prt | 160.50K |
| 42 | xiaobiqigang1.prt | 604.00K |
| 43 | xiaobiqiganggan.prt | 220.00K |
| 44 | yaobu.prt | 240.00K |
| 45 | yaobuqigang.prt | 636.00K |
| 46 | zhizuo.prt | 396.00K |
| 47 | zhoucheng.prt | 532.00K |
| 48 | zhuabu.prt | 964.00K |
| 49 | zhuan2.prt | 615.15K |
| 50 | zhuangpei.prt | 1.47M |
| 51 | zhuangshou.prt | 96.00K |
| 52 | motion_1-solution_1.msg | 43.64K |
| 53 | motion_1-solution_1.rad | 1.66M |
| 54 | motion_1-solution_1.rmd | 27.54K |
| 55 | motion_1-solution_1.rplt | 2.48M |
| 56 | motion_1.sim | 468.50K |
| 57 | shipin.avi | 25.22M |
| 58 | zhuangpei.afu | 1.50K |
| 59 | zhuangpeishipin.avi | 7.72M |
此图纸下载需要30金币
立即下载
发布者
火星上的冷风
创作: 314
粉丝: 18
加入时间:2023-05-25

模型信息
图纸格式:prt
文件大小:16.58M
所需金币:30
上传时间:2023-10-13 16:56:55
是否可编辑:可修改,包括参数
版本:UG
标签
上下料
机械手
搬运
机器人
加工
图纸简介
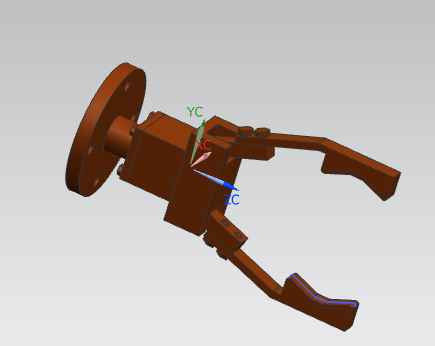
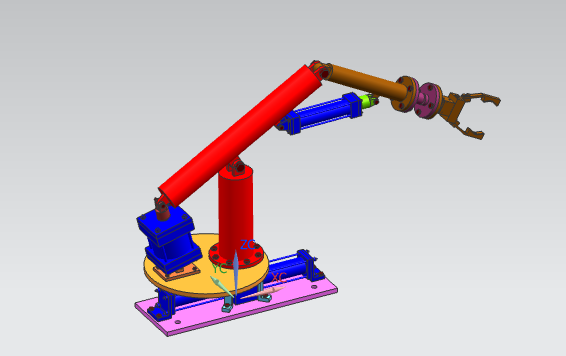
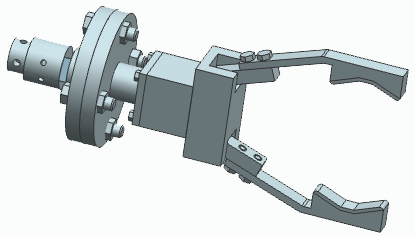
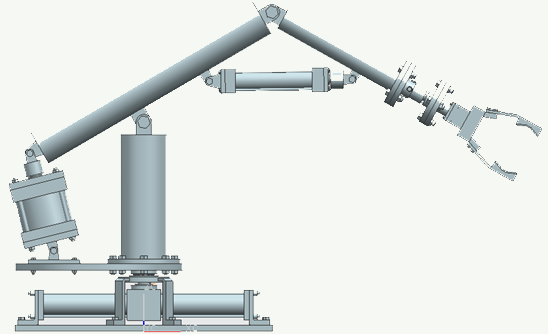
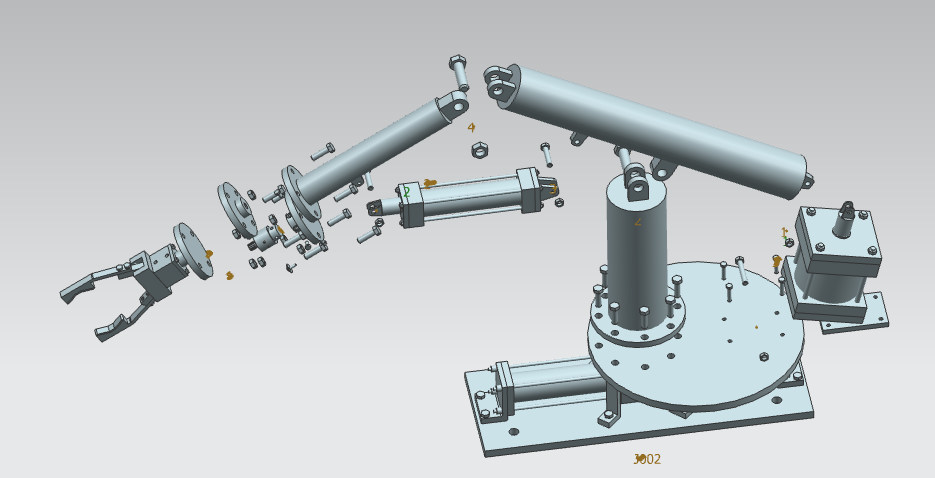
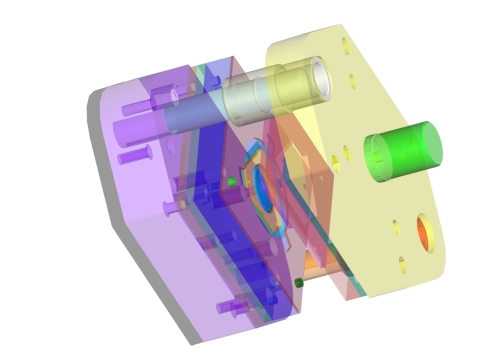
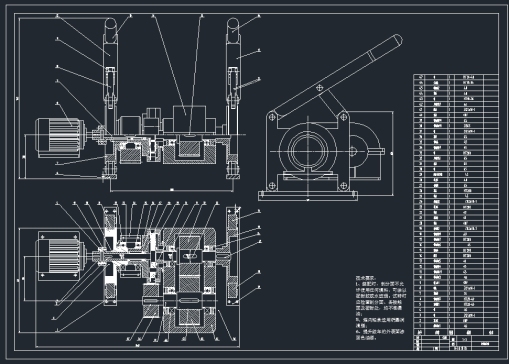
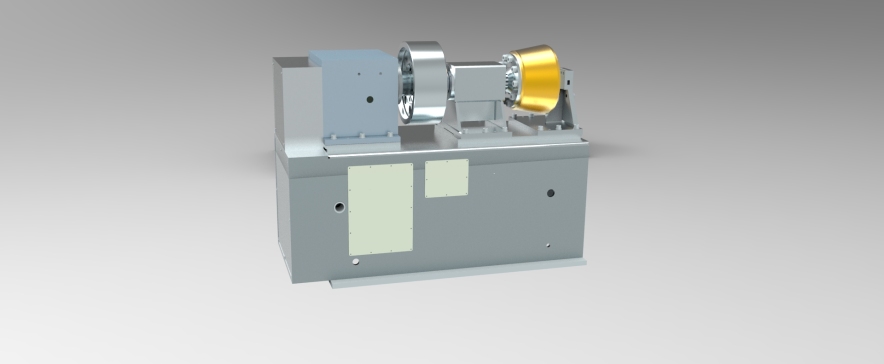
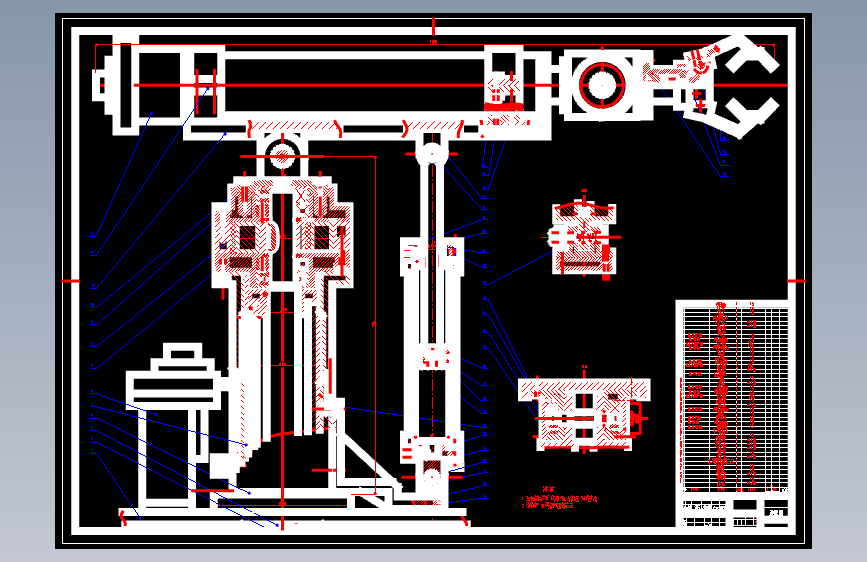
整个结构安装于圆形底板上,圆形底板下方焊接有支撑柱体,通过推力轴承施力于支架上,支架安装在总底座上。
圆形底板下方的支撑主体通过键连接于支架下方的回转缸,旋转缸实现整个机械手在空间中的旋转动作。通过腕部回转缸旋转、大小臂之间气缸伸缩、大臂底板间气缸伸缩、底板与底座间回转缸的旋转共同实现了机械手空间中的5个自由度。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多

猜你喜欢
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

