登录注册
UG机械手(ID:1896850)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17408843187563.rar | 32.37M |
| 2 | 11_x_t.afu | 1.50K |
| 3 | 11_x_t.prt | 225.50K |
| 4 | motion_1-solution_1.msg | 35.03K |
| 5 | motion_1-solution_1.rad | 543.14K |
| 6 | motion_1-solution_1.rmd | 22.24K |
| 7 | motion_1-solution_1.rplt | 791.51K |
| 8 | motion_1.sim | 233.50K |
| 9 | taozi_x_t.prt | 149.50K |
| 10 | _model1.prt | 140.50K |
| 11 | 倒角10_id18_x_t.prt | 88.50K |
| 12 | 倒角1_id122_x_t.prt | 109.50K |
| 13 | 倒角1_id170_x_t.prt | 156.50K |
| 14 | 倒角1_id186_x_t.prt | 139.00K |
| 15 | 倒角1_id190_x_t.prt | 139.00K |
| 16 | 倒角1_id250_x_t.prt | 165.50K |
| 17 | 倒角1_id282_x_t.prt | 471.00K |
| 18 | 倒角1_id290_x_t.prt | 297.50K |
| 19 | 倒角1_id294_x_t.prt | 300.50K |
| 20 | 倒角1_id298_x_t.prt | 297.00K |
| 21 | 倒角1_id334_x_t.prt | 160.50K |
| 22 | 倒角1_id406_x_t.prt | 358.00K |
| 23 | 倒角1_id410_x_t.prt | 153.00K |
| 24 | 倒角1_id6_x_t.prt | 724.00K |
| 25 | 倒角1_id78_x_t.prt | 136.50K |
| 26 | 倒角2_id242_x_t.prt | 159.50K |
| 27 | 倒角2_id246_x_t.prt | 160.00K |
| 28 | 倒角2_id362_x_t.prt | 107.50K |
| 29 | 倒角2_id38_x_t.prt | 151.50K |
| 30 | 倒角3_id194_x_t.prt | 479.00K |
| 31 | 倒角4_id142_x_t.prt | 784.00K |
| 32 | 倒角4_id278_x_t.prt | 206.50K |
| 33 | 倒角4_id370_x_t.prt | 134.50K |
| 34 | 倒角4_id374_x_t.prt | 135.00K |
| 35 | 倒角5_id106_x_t.prt | 291.00K |
| 36 | 倒角5_id34_x_t.prt | 276.00K |
| 37 | 倒角6_id358_x_t.prt | 153.00K |
| 38 | 倒角7_id154_x_t.prt | 141.00K |
| 39 | 倒角7_id354_x_t.prt | 118.50K |
| 40 | 倒角9_id22_x_t.prt | 87.50K |
| 41 | 切除-拉伸10_id202_x_t.prt | 109.00K |
| 42 | 切除-拉伸11_id150_x_t.prt | 229.00K |
| 43 | 切除-拉伸11_id286_x_t.prt | 147.50K |
| 44 | 切除-拉伸11_id414_x_t.prt | 240.00K |
| 45 | 切除-拉伸12_2__id206_x_t.prt | 87.50K |
| 46 | 切除-拉伸12_id54_x_t.prt | 165.00K |
| 47 | 切除-拉伸14_id14_x_t.prt | 191.50K |
| 48 | 切除-拉伸16_id138_x_t.prt | 221.50K |
| 49 | 切除-拉伸17_id50_x_t.prt | 208.00K |
| 50 | 切除-拉伸18_id210_x_t.prt | 163.50K |
| 51 | 切除-拉伸19_id26_x_t.prt | 250.00K |
| 52 | 切除-拉伸1_id182_x_t.prt | 97.00K |
| 53 | 切除-拉伸1_id66_x_t.prt | 103.50K |
| 54 | 切除-拉伸1_id74_x_t.prt | 116.00K |
| 55 | 切除-拉伸20_id214_x_t.prt | 92.00K |
| 56 | 切除-拉伸21_id218_x_t.prt | 138.50K |
| 57 | 切除-拉伸2_1__id418_x_t.prt | 123.50K |
| 58 | 切除-拉伸2_id102_x_t.prt | 126.50K |
| 59 | 切除-拉伸2_id346_x_t.prt | 189.00K |
| 60 | 切除-拉伸2_id426_x_t.prt | 452.50K |
| 61 | 切除-拉伸2_id430_x_t.prt | 456.00K |
| 62 | 切除-拉伸2_id70_x_t.prt | 221.00K |
| 63 | 切除-拉伸2_id82_x_t.prt | 436.50K |
| 64 | 切除-拉伸2_id90_x_t.prt | 211.00K |
| 65 | 切除-拉伸32_id238_x_t.prt | 409.00K |
| 66 | 切除-拉伸3_id126_x_t.prt | 152.50K |
| 67 | 切除-拉伸3_id130_x_t.prt | 153.00K |
| 68 | 切除-拉伸3_id134_x_t.prt | 152.00K |
| 69 | 切除-拉伸3_id254_x_t.prt | 628.00K |
| 70 | 切除-拉伸3_id322_x_t.prt | 664.00K |
| 71 | 切除-拉伸5_id318_x_t.prt | 163.50K |
| 72 | 切除-拉伸6_1__id270_x_t.prt | 1.84M |
| 73 | 切除-拉伸6_2__id274_x_t.prt | 211.00K |
| 74 | 切除-拉伸6_id222_x_t.prt | 137.50K |
| 75 | 切除-拉伸6_id422_x_t.prt | 208.50K |
| 76 | 切除-拉伸8_1__id198_x_t.prt | 109.50K |
| 77 | 切除-拉伸8_id62_x_t.prt | 116.00K |
| 78 | 切除-旋转1_id378_x_t.prt | 153.50K |
| 79 | 圆角1_id10_x_t.prt | 157.50K |
| 80 | 圆角1_id110_x_t.prt | 127.00K |
| 81 | 圆角1_id114_x_t.prt | 130.00K |
| 82 | 圆角1_id118_x_t.prt | 130.50K |
| 83 | 圆角1_id158_x_t.prt | 132.00K |
| 84 | 圆角1_id162_x_t.prt | 130.50K |
| 85 | 圆角1_id226_x_t.prt | 136.00K |
| 86 | 圆角1_id230_x_t.prt | 136.00K |
| 87 | 圆角1_id258_x_t.prt | 152.00K |
| 88 | 圆角1_id262_x_t.prt | 152.00K |
| 89 | 圆角1_id266_x_t.prt | 151.50K |
| 90 | 圆角1_id302_x_t.prt | 131.00K |
| 91 | 圆角1_id306_x_t.prt | 131.00K |
| 92 | 圆角1_id310_x_t.prt | 131.00K |
| 93 | 圆角1_id314_x_t.prt | 130.00K |
| 94 | 圆角1_id326_x_t.prt | 133.50K |
| 95 | 圆角1_id330_x_t.prt | 133.00K |
| 96 | 圆角1_id382_x_t.prt | 132.00K |
| 97 | 圆角1_id386_x_t.prt | 132.00K |
| 98 | 圆角1_id390_x_t.prt | 133.50K |
| 99 | 圆角1_id394_x_t.prt | 132.00K |
| 100 | 圆角1_id42_x_t.prt | 146.00K |
| 101 | 圆角1_id58_x_t.prt | 128.50K |
| 102 | 圆角1_id86_x_t.prt | 133.00K |
| 103 | 圆角1_id94_x_t.prt | 131.50K |
| 104 | 圆角1_id98_x_t.prt | 132.00K |
| 105 | 圆角3_id146_x_t.prt | 149.50K |
| 106 | 圆角3_id342_x_t.prt | 230.50K |
| 107 | 圆角5_id350_x_t.prt | 97.50K |
| 108 | 圆角5_id402_x_t.prt | 120.00K |
| 109 | 圆角7_id366_x_t.prt | 130.00K |
| 110 | 圆角9_id234_x_t.prt | 340.00K |
| 111 | 手爪固定.prt | 396.50K |
| 112 | 手爪机构1.prt | 135.00K |
| 113 | 手爪机构2.prt | 135.00K |
| 114 | 手爪机构3.prt | 136.50K |
| 115 | 手爪机构4.prt | 136.50K |
| 116 | 手爪连接件1.prt | 104.50K |
| 117 | 手爪连接件2.prt | 104.50K |
| 118 | 手爪齿右上.prt | 197.00K |
| 119 | 手爪齿右下.prt | 197.00K |
| 120 | 手爪齿左上.prt | 201.50K |
| 121 | 手爪齿左下.prt | 200.50K |
| 122 | 拉伸16_id30_x_t.prt | 86.00K |
| 123 | 拉伸2_id166_x_t.prt | 680.00K |
| 124 | 拉伸2_id178_x_t.prt | 95.50K |
| 125 | 拉伸3_id46_x_t.prt | 190.50K |
| 126 | 拉伸7_id398_x_t.prt | 169.50K |
| 127 | 旋转1_id174_x_t.prt | 98.50K |
| 128 | 机械手.prt | 16.40M |
| 129 | 阵列_圆周_2_id338_x_t.prt | 672.00K |
| 130 | 11_x_t.afu | 1.50K |
| 131 | motion_1-solution_1.msg | 35.03K |
| 132 | motion_1-solution_1.rad | 543.14K |
| 133 | motion_1-solution_1.rmd | 23.05K |
| 134 | motion_1-solution_1.rplt | 791.49K |
| 135 | motion_1.sim | 238.50K |
| 136 | motion_2.sim | 240.50K |
| 137 | motion_3.sim | 1.13M |
| 138 | _model1.prt | 140.50K |
此图纸下载需要83金币
立即下载
发布者
一品三维工程师
创作: 295
粉丝: 2
加入时间:2024-05-03

模型信息
图纸格式:prt
文件大小:33.14M
所需金币:83
上传时间:2025-03-02 10:58:45
是否可编辑:可修改,包括参数
版本:UG 12
标签
UG建模
机械手
图纸简介
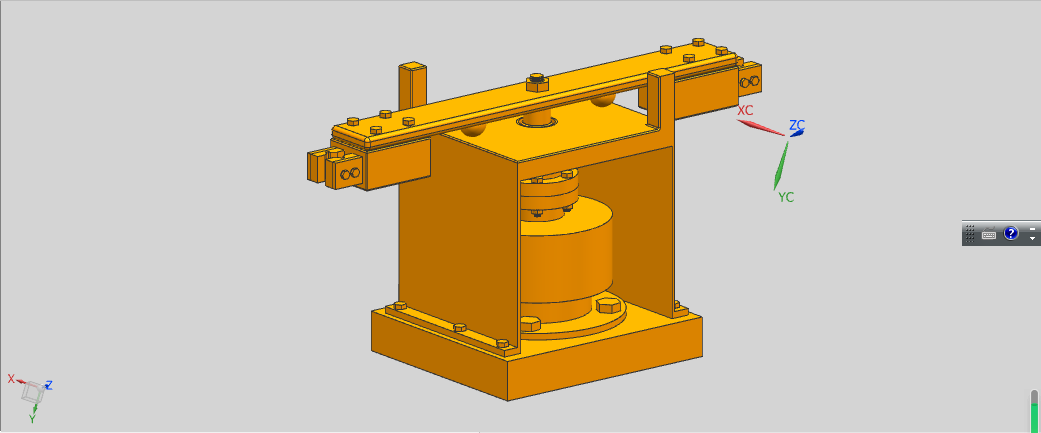
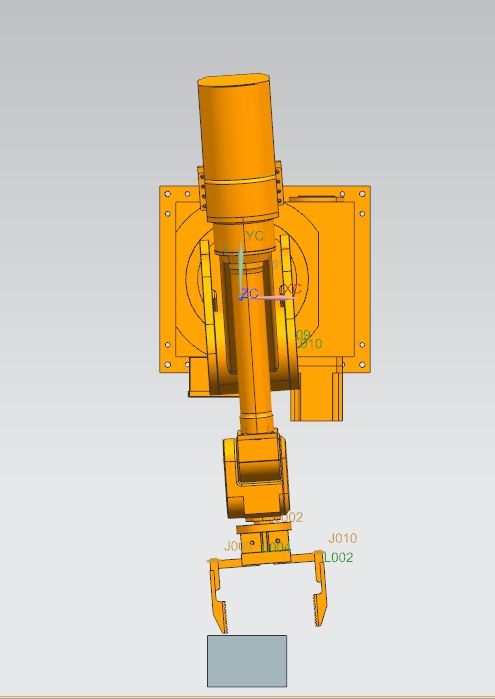
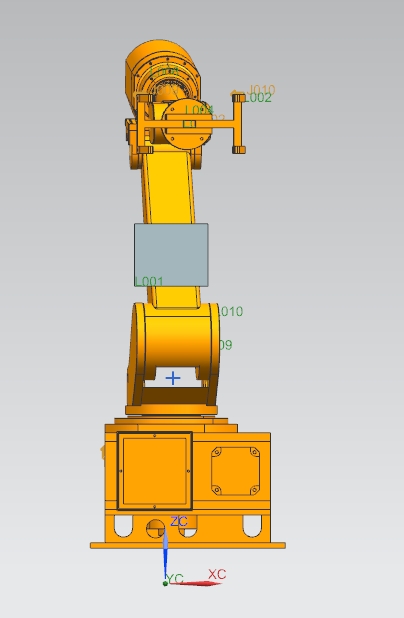
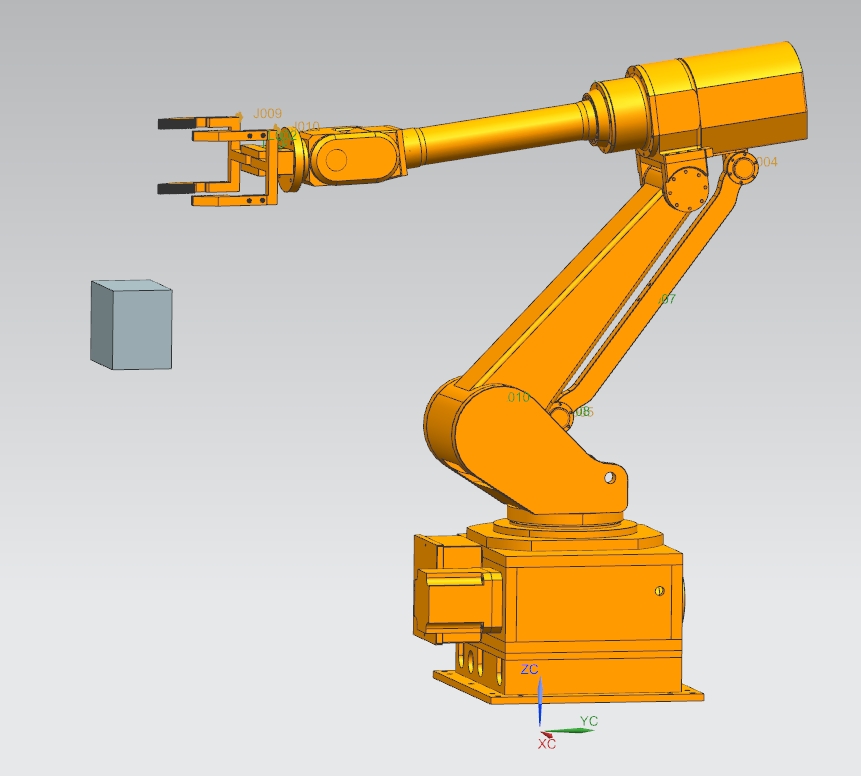
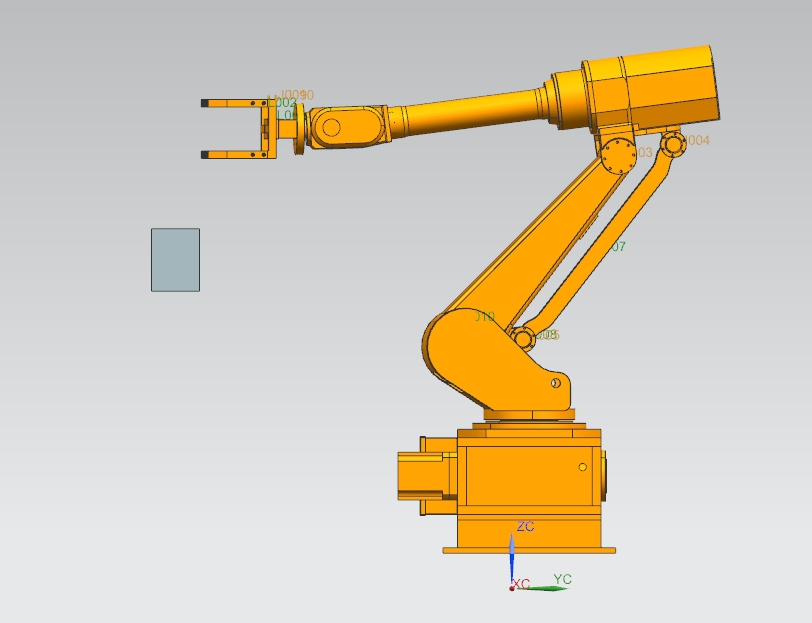
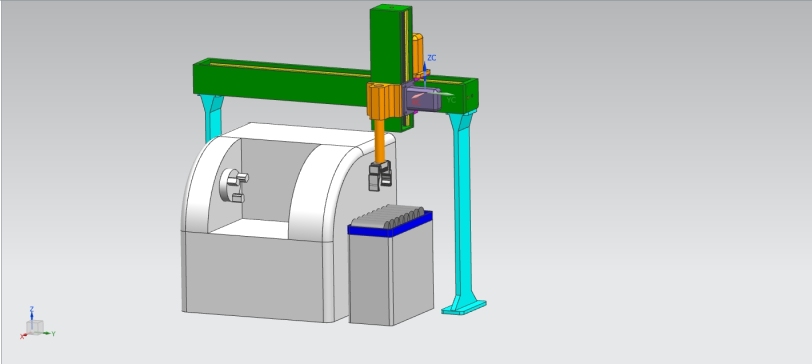
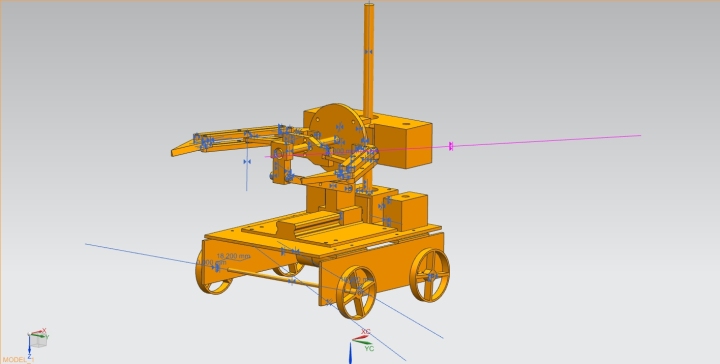
这份运用 UG 技术建模的机械手模型,完整呈现其设计精髓。
模型明细表清晰罗列机械手臂、关节、驱动电机、传感器、末端执行器等部件的名称、规格参数、材质及数量。例如,机械手臂的长度、关节的活动范围等关键数据详细记录,为生产制造提供精准依据。
技术要求对机械手臂的强度、关节的转动精度严格把控,确保动作准确。同时,对驱动电机的扭矩、传感器的灵敏度等有明确标准,保障稳定运行。
设计原理是通过驱动电机带动关节运动,配合传感器反馈信息,精确控制机械手臂姿态,末端执行器完成抓取、搬运等操作。
机械手广泛用于工业生产、物流分拣、医疗手术辅助等领域,实现自动化作业,提高生产效率与质量。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.png)
3.jpg)

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0.png)
0.png)