
登录注册
管内轮腿式移动机器人三维(ID:2349171)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17515103715182.rar | 8.91M |
| 2 | CJ.prt | 286.00K |
| 3 | CLL.prt | 146.00K |
| 4 | DDG.prt | 160.50K |
| 5 | DG.prt | 109.50K |
| 6 | DG1.prt | 135.50K |
| 7 | DGZ.prt | 211.00K |
| 8 | DGZ1.prt | 248.50K |
| 9 | JD.prt | 106.50K |
| 10 | JS.prt | 684.00K |
| 11 | KADAO.prt | 190.00K |
| 12 | LG.prt | 117.50K |
| 13 | LM.prt | 307.50K |
| 14 | LM2.prt | 304.50K |
| 15 | M2.prt | 478.00K |
| 16 | M3.prt | 287.50K |
| 17 | M3T.prt | 242.00K |
| 18 | M3Y.prt | 226.50K |
| 19 | M6-S.prt | 282.50K |
| 20 | SAI.prt | 143.00K |
| 21 | SG.prt | 390.00K |
| 22 | SGZ.prt | 199.00K |
| 23 | shua.prt | 7.54M |
| 24 | TANTOU.prt | 260.50K |
| 25 | THH.prt | 471.50K |
| 26 | THH1.prt | 455.50K |
| 27 | TTL.prt | 369.50K |
| 28 | X.prt | 122.50K |
| 29 | xiao2.prt | 142.50K |
| 30 | xidao.prt | 162.50K |
| 31 | xidaopan.prt | 332.50K |
| 32 | xidaozhou.prt | 225.50K |
| 33 | xixuetou_asm1.prt | 449.50K |
| 34 | xixuezuo.prt | 351.50K |
| 35 | YOUXIANG.prt | 450.00K |
| 36 | Z.prt | 230.00K |
| 37 | ZC_asm1.prt | 151.50K |
| 38 | ZHUABU_asm1.prt | 158.50K |
| 39 | ZHUA_asm1.prt | 94.50K |
| 40 | ZHUA_asm2.prt | 95.50K |
| 41 | ZONGTI_asm1.prt | 290.50K |
| 42 | ZZ.prt | 409.00K |
| 43 | ZZ1.prt | 152.50K |
| 44 | 管内轮腿式移动机器人.prt | 5.44M |
| 45 | 管内轮腿式移动机器人.x_t | 5.01M |
此图纸下载需要88金币
立即下载
发布者
一品三维工程师
创作: 270
粉丝: 2
加入时间:2024-05-03

模型信息
图纸格式:prt,x_t
文件大小:9.12M
所需金币:88
上传时间:2025-07-03 10:39:38
是否可编辑:可修改,包括参数
版本:Parasolid
标签
UG建模
设计
医疗
图纸简介
模型明细
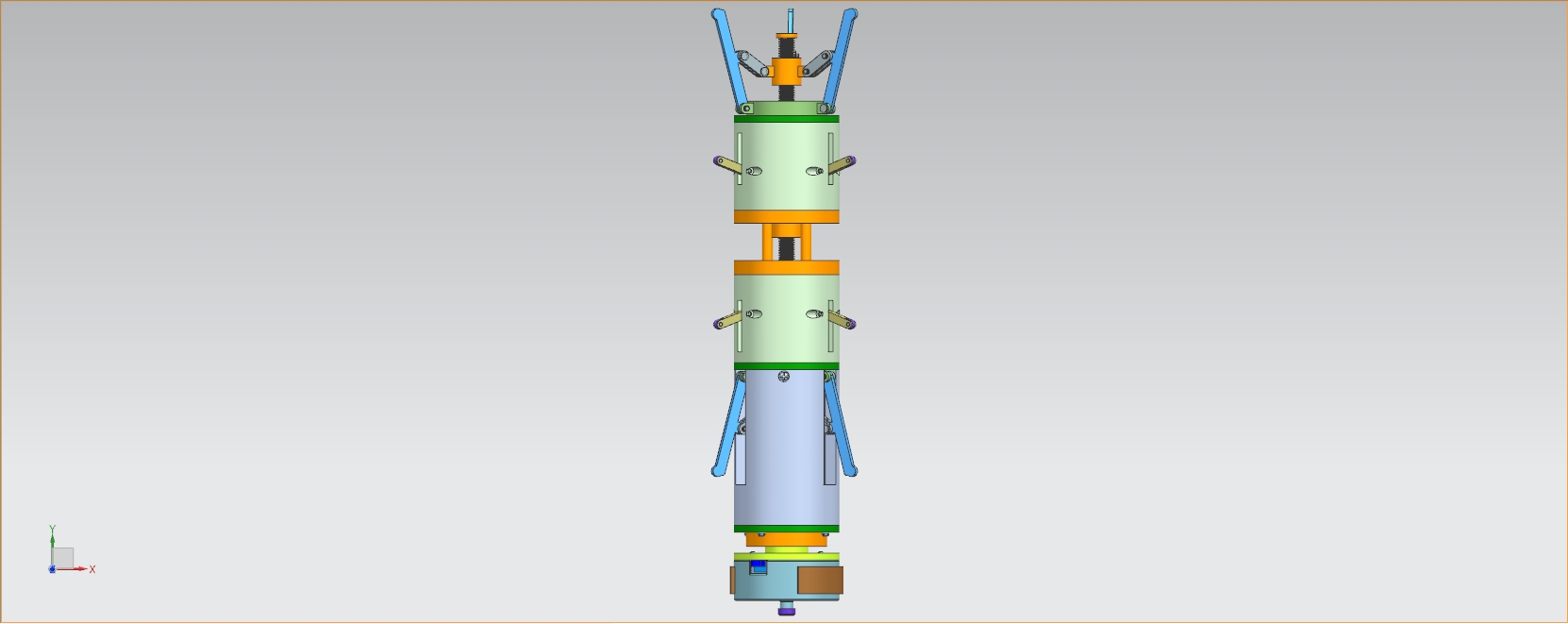
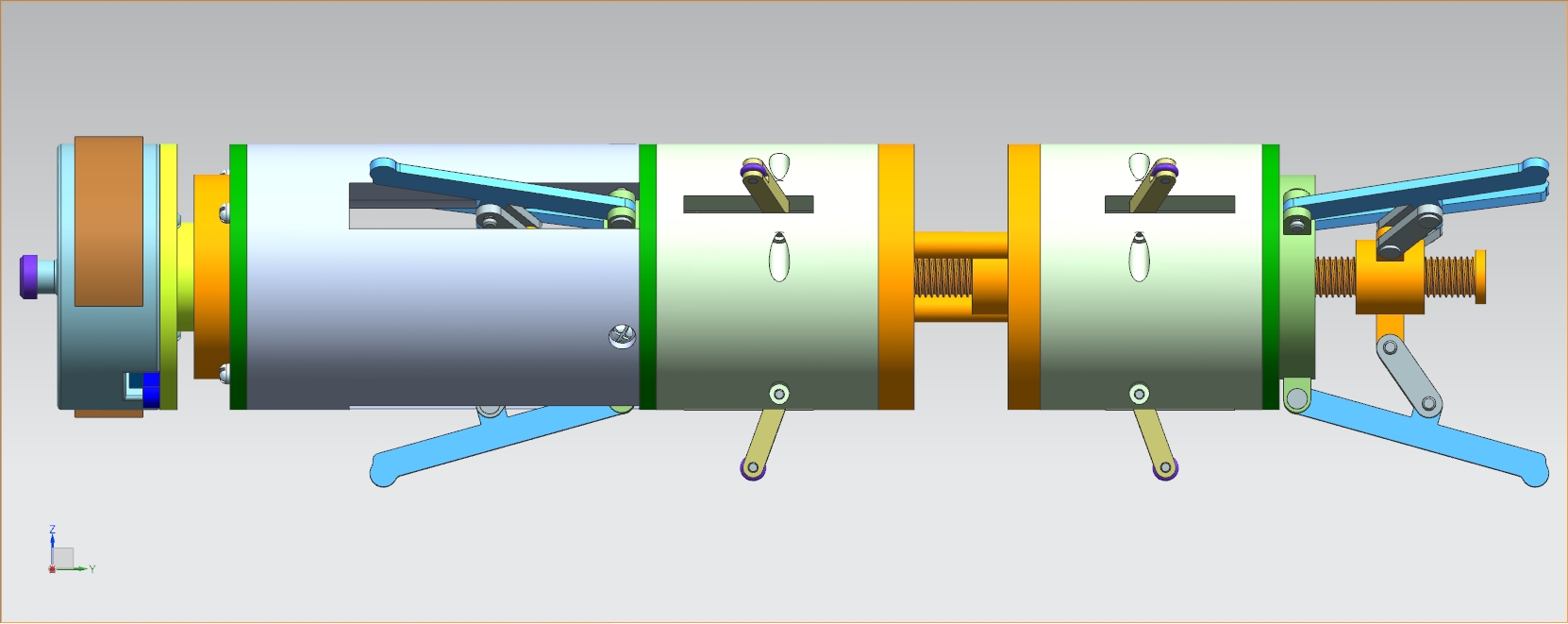
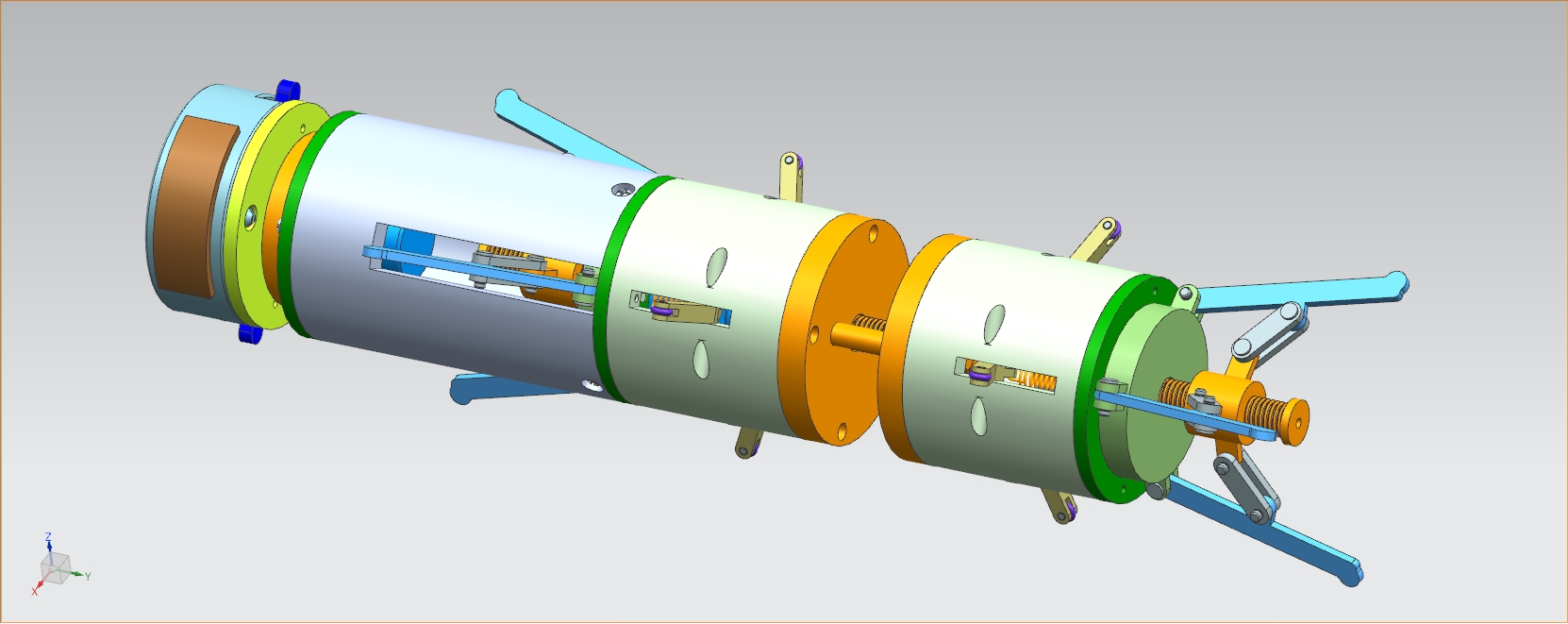
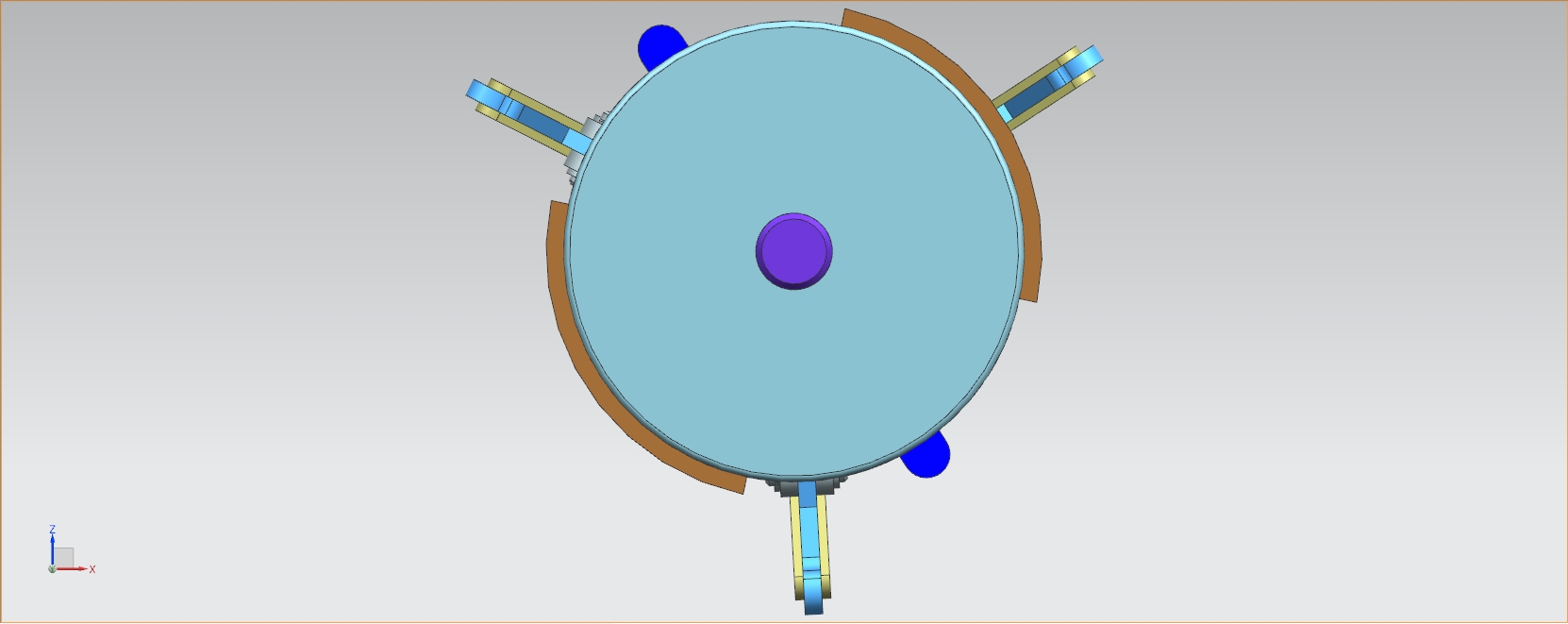
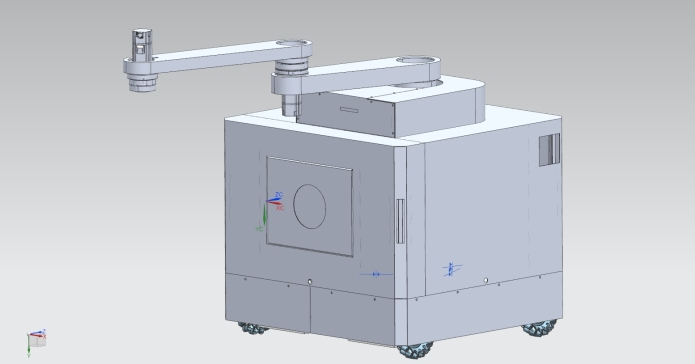
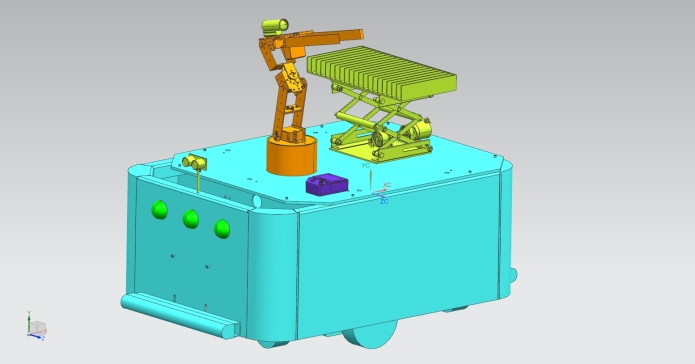
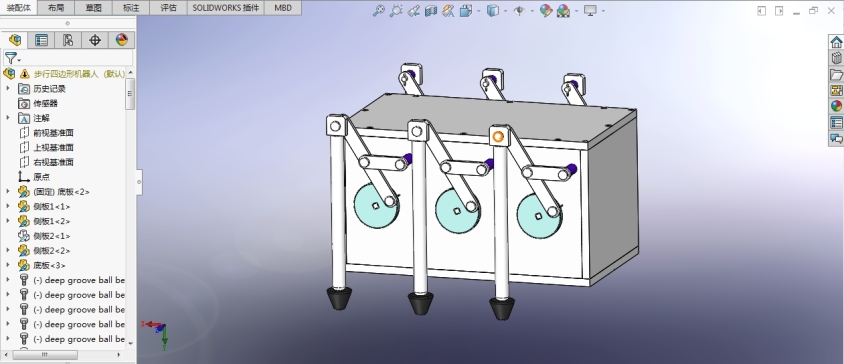
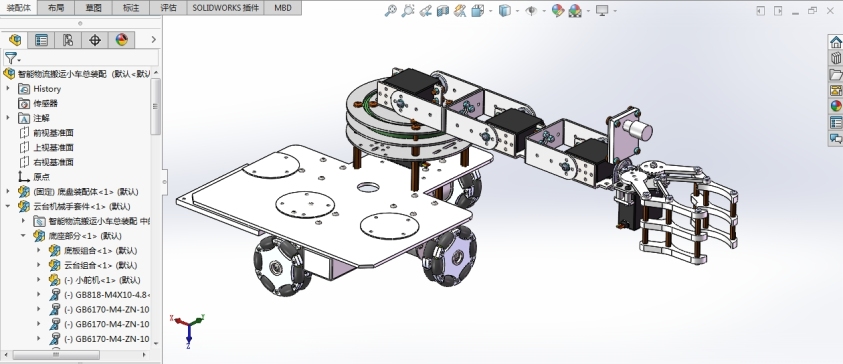
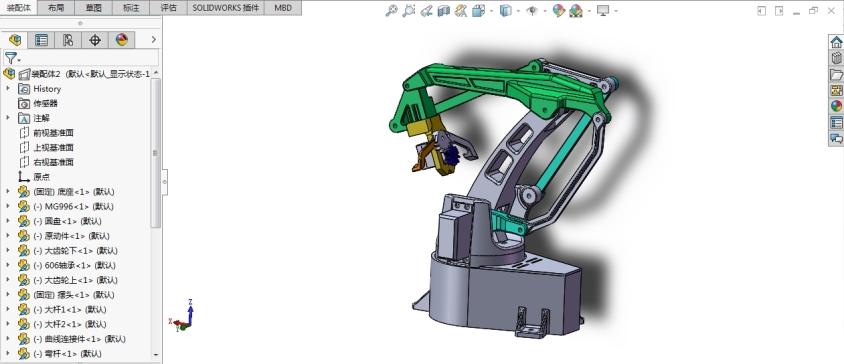
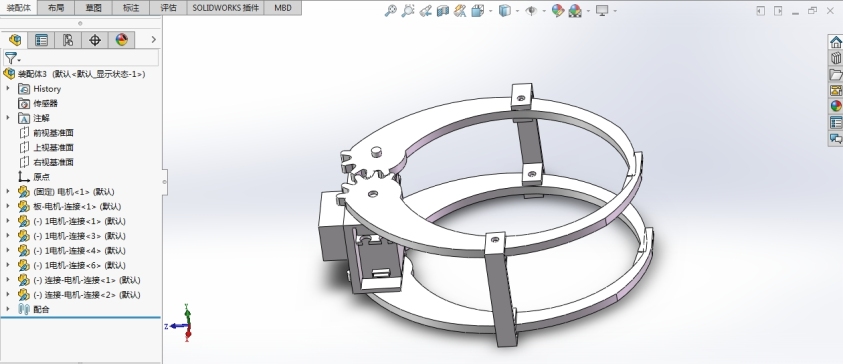
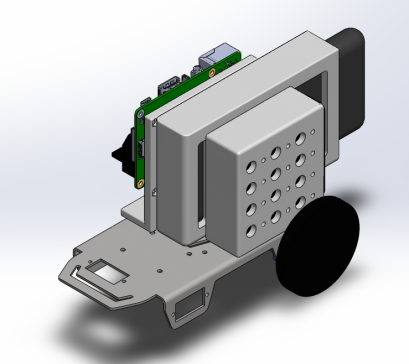
该机器人模型包含轮腿复合机构、驱动单元、导向轮组、支撑臂及控制模块。技术要求
轮腿机构伸缩范围适配 50-200mm 管径,行走速度误差≤±0.05m/s。
支撑臂夹紧力稳定,在管内倾斜 30° 时无滑动,重复定位精度 ±1mm。
整体结构防水等级达 IP65,适应潮湿管道环境。
设计原理
驱动单元带动轮腿机构转动实现移动,支撑臂根据管径自动调节张紧度,确保与管壁贴合;导向轮组修正偏移量,配合传感器实时反馈位置,通过控制模块协调各部件运动。
用途
适用于石油、天然气、市政管道的检测与维护
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0_0_364.png)
0.png)
0.png)
0.png)

0.png)

