
登录注册
ug行走机器狗及运动(ID:2390809)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17524571475954.rar | 2.37M |
| 2 | 内电机.prt | 224.50K |
| 3 | 四足机器人.log | 21.61K |
| 4 | 四足机器人.STEP | 2.72M |
| 5 | 四足机器人_step.prt | 96.00K |
| 6 | 外电机.prt | 224.00K |
| 7 | 大腿后连杆.prt | 86.00K |
| 8 | 大腿连杆1.prt | 133.00K |
| 9 | 大腿连杆2.prt | 81.50K |
| 10 | 小腿连杆.prt | 92.50K |
| 11 | 机身内挡板1.prt | 129.50K |
| 12 | 机身内挡板2.prt | 111.50K |
| 13 | 机身外挡板1.prt | 144.50K |
| 14 | 机身外挡板2.prt | 113.50K |
| 15 | 机身端盖.prt | 120.50K |
| 16 | 机身部分.prt | 70.00K |
| 17 | 电机保护壳.prt | 145.00K |
| 18 | 电机和运动部分1.prt | 75.50K |
| 19 | 电机和运动部分2.prt | 77.50K |
| 20 | 电机基座.prt | 114.00K |
| 21 | 电机法兰.prt | 92.00K |
| 22 | 足.prt | 90.50K |
| 23 | motion_1-solution_1.msg | 46.60K |
| 24 | motion_1-solution_1.rad | 556.88K |
| 25 | motion_1-solution_1.rmd | 33.82K |
| 26 | motion_1-solution_1.rplt | 991.37K |
| 27 | motion_1.sim | 165.00K |
| 28 | 四足机器人_step.afu | 1.50K |
此图纸下载需要88金币
立即下载
发布者
一品三维工程师
创作: 314
粉丝: 4
加入时间:2024-05-03

模型信息
图纸格式:prt,step
文件大小:2.42M
所需金币:88
上传时间:2025-07-14 09:39:09
是否可编辑:可修改,包括参数
版本:STEP
标签
UG 建模
机器狗
图纸简介
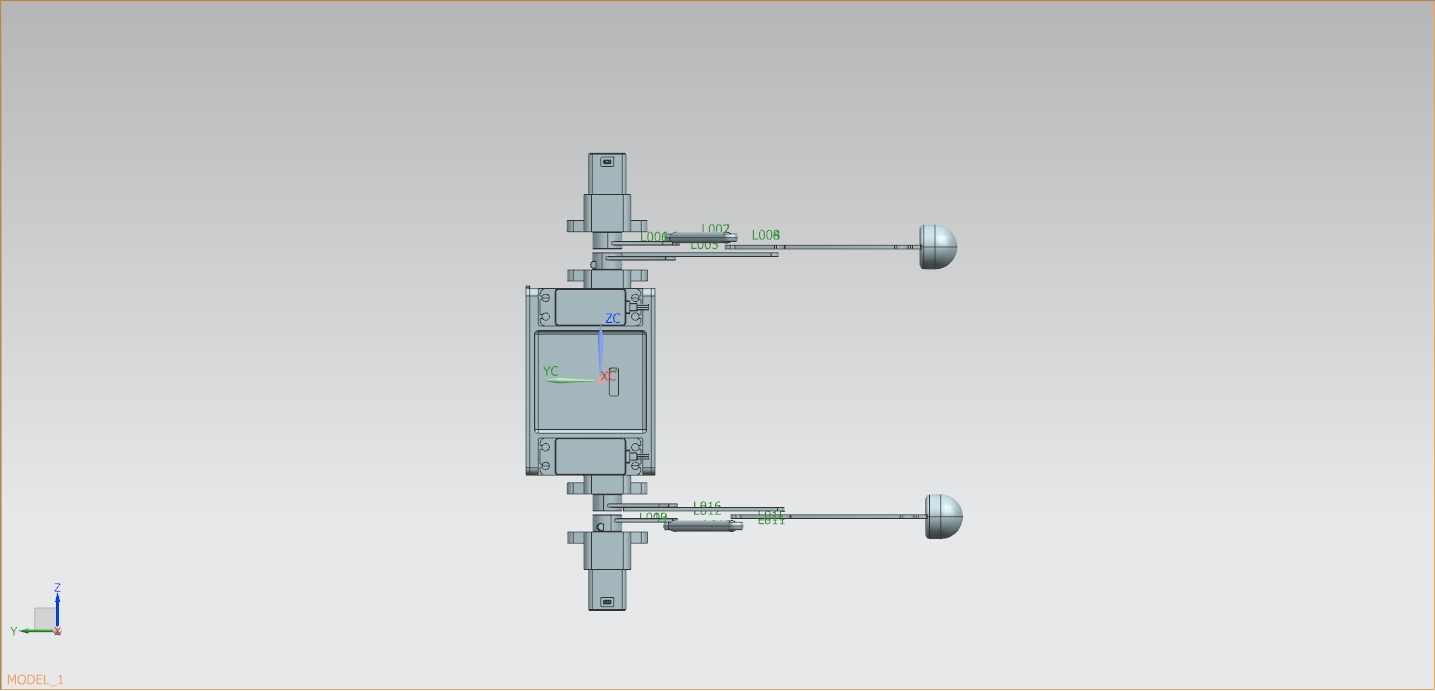
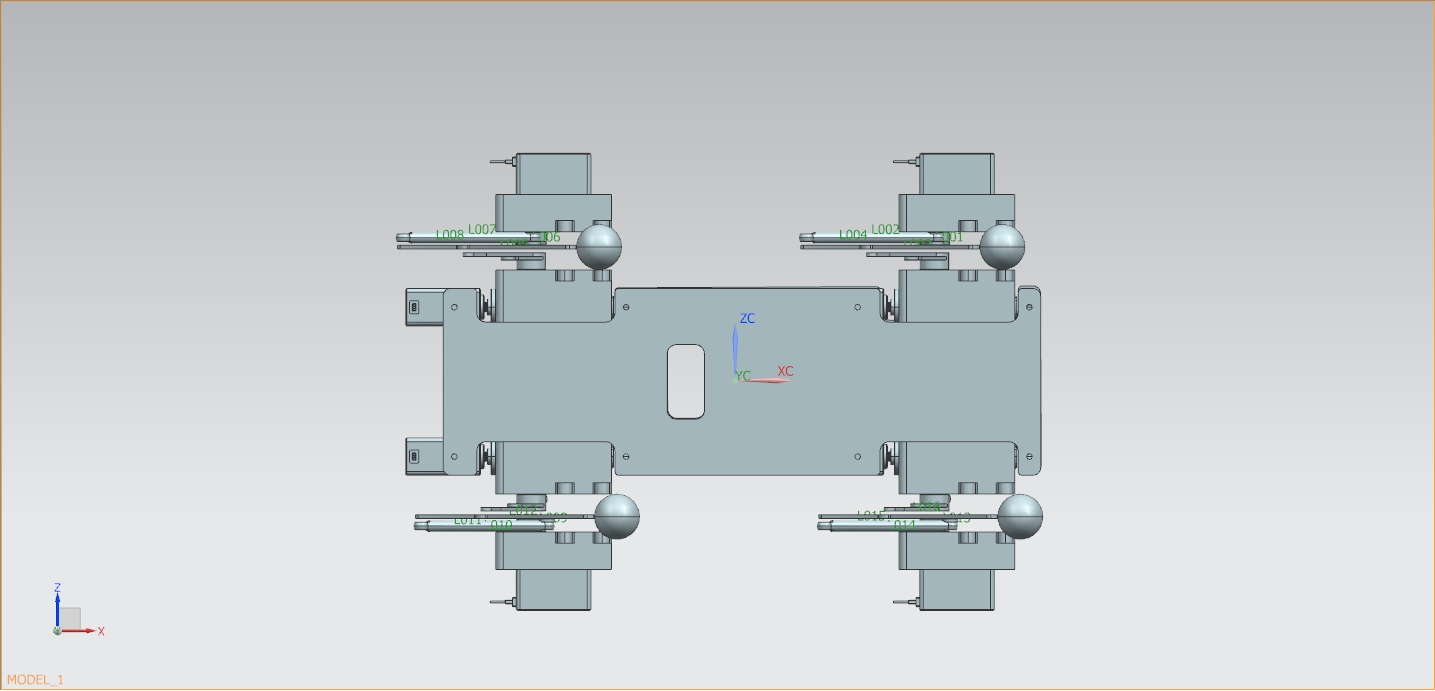
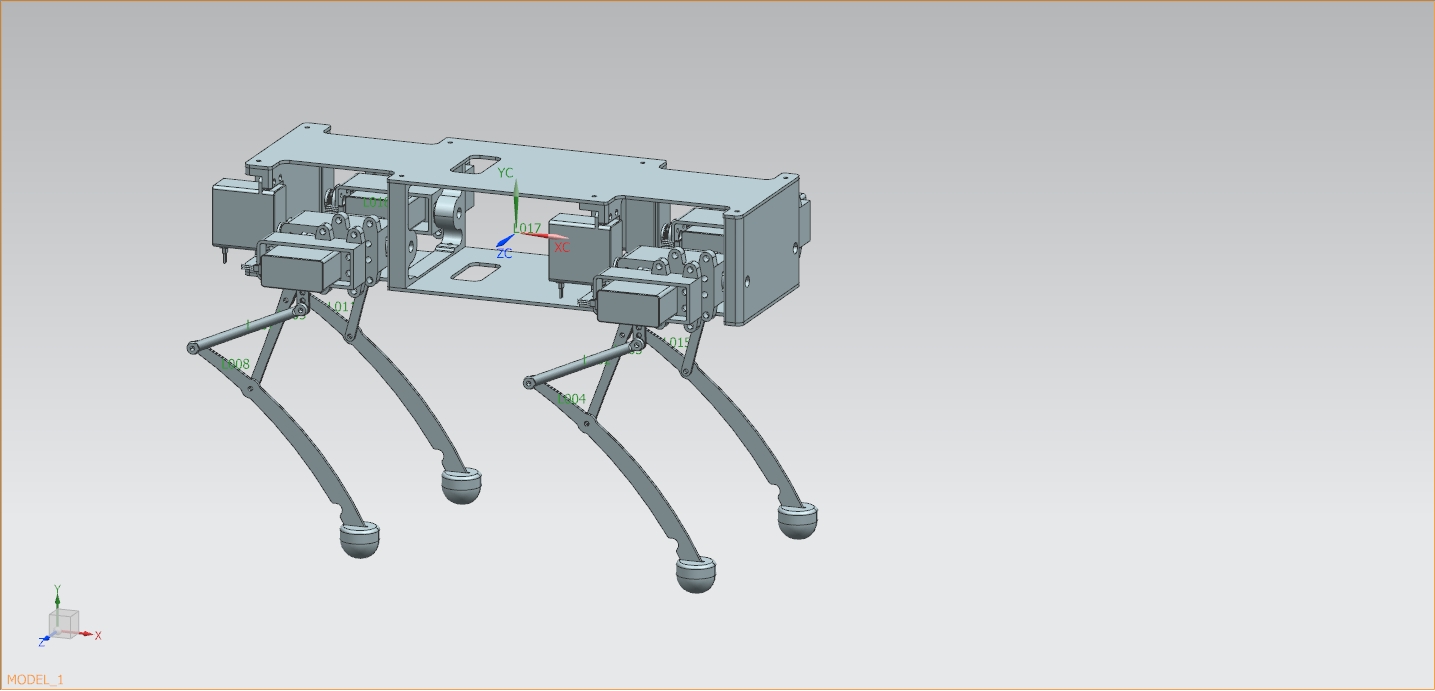
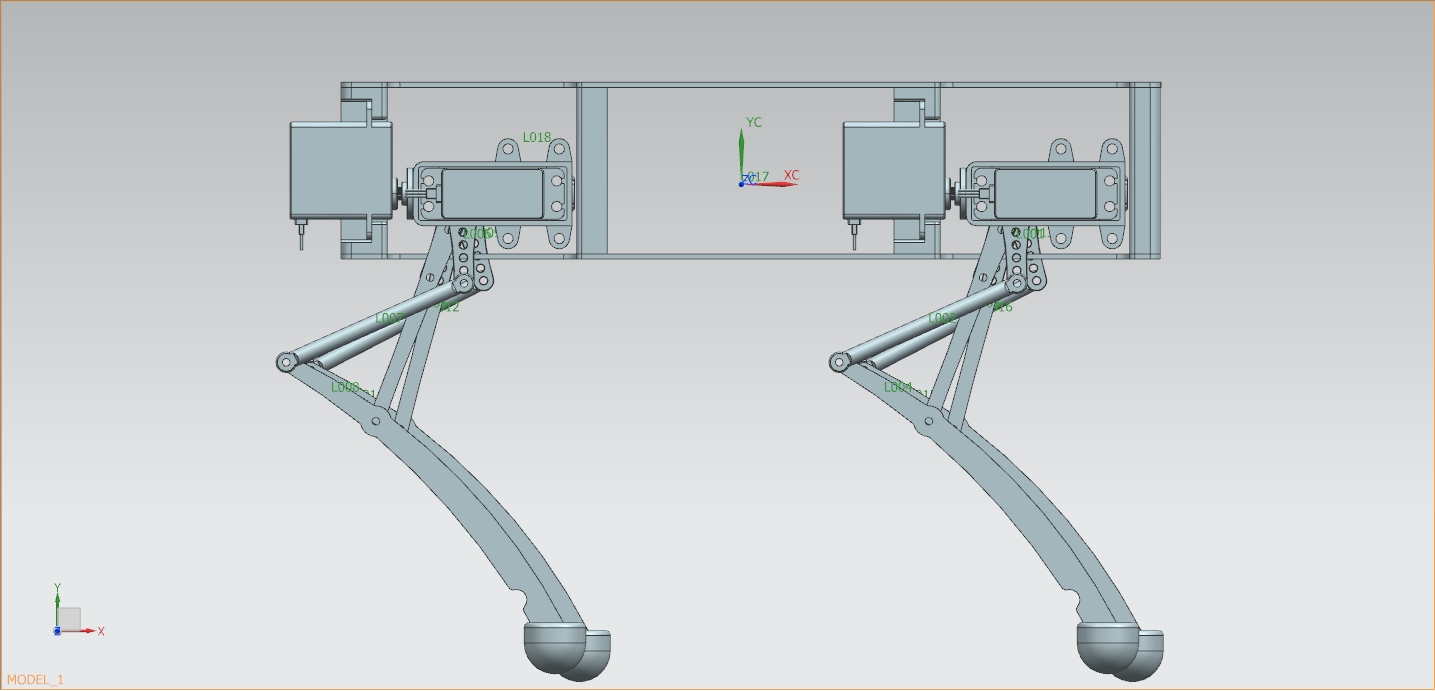
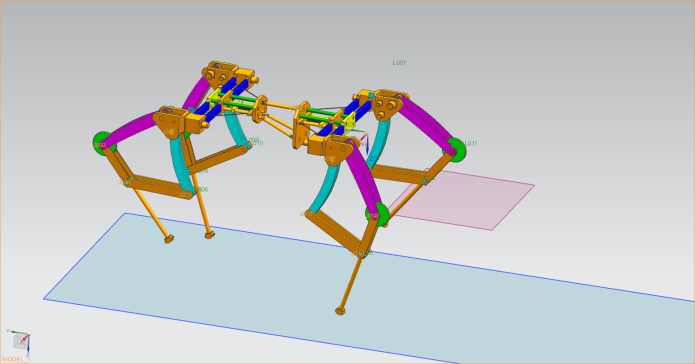
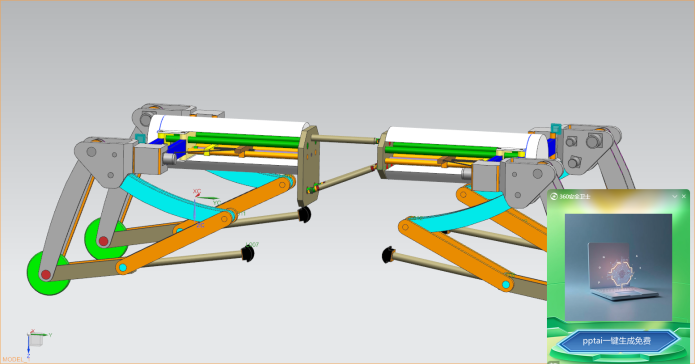
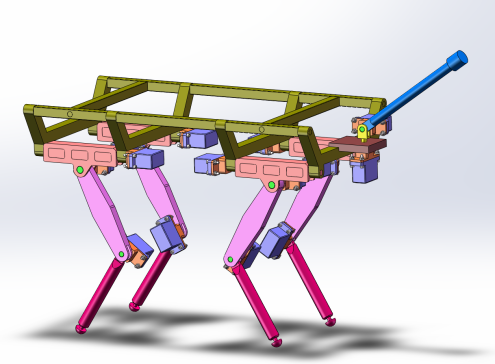
行走机器狗模型由躯干骨架、四条腿部机构、驱动电机、传感器模块及控制系统舱组成。技术要求
腿部关节旋转角度范围 ±90°,重复定位误差≤±1°。
行走速度 0.5-2m/s,步态切换响应时间≤0.3s,适应平地、斜坡等地形。
整体结构承重≥5kg,防水等级 IP54,满足户外使用需求。
设计原理
控制系统接收传感器信号,计算步态参数后驱动腿部关节协同运动,通过调整各关节角度实现前进、转弯、避障等动作,利用重心平衡算法维持行走稳定性。
用途
适用于巡逻侦查、救灾救援、科研实验等场景,可替代人工进入复杂环境执行任务,也可作为教育教具,展示机械运动与智能控制技术。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多

0.png)
0.jpg)
4.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)

