登录注册
蜘蛛机器人(ID:683357)








| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16901880868346.rar | 3.49M |
| 2 | 装配体.SLDASM | 1.02M |
| 3 | 零件1.SLDPRT | 423.00K |
| 4 | 零件11.SLDPRT | 842.00K |
| 5 | 零件12.SLDPRT | 715.00K |
| 6 | 零件2.SLDPRT | 1.71M |
| 7 | 零件3.SLDPRT | 387.50K |
| 8 | 零件4.SLDPRT | 368.00K |
| 9 | 零件5.SLDPRT | 368.50K |
| 10 | 零件6.SLDPRT | 508.50K |
| 11 | 零件7.SLDPRT | 608.50K |
| 12 | 零件8.SLDPRT | 296.50K |
| 13 | 零件9.SLDPRT | 569.50K |
此图纸下载需要25金币
立即下载
发布者
火星上的冷风
创作: 314
粉丝: 19
加入时间:2023-05-25

模型信息
图纸格式:sldasm,sldprt
文件大小:3.57M
所需金币:25
上传时间:2023-07-24 16:41:29
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2014
标签
仿生
机器人
自动化
图纸简介
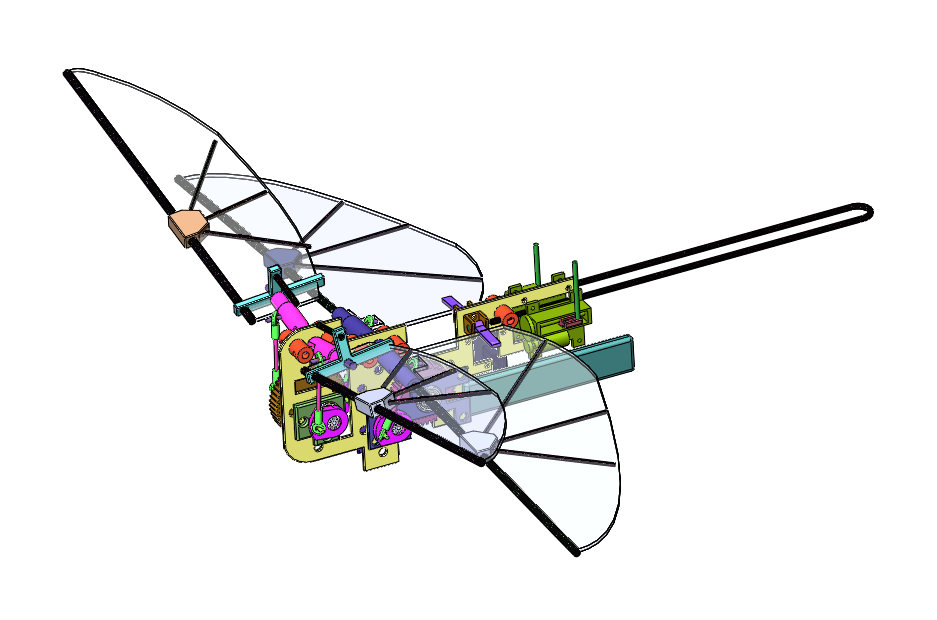
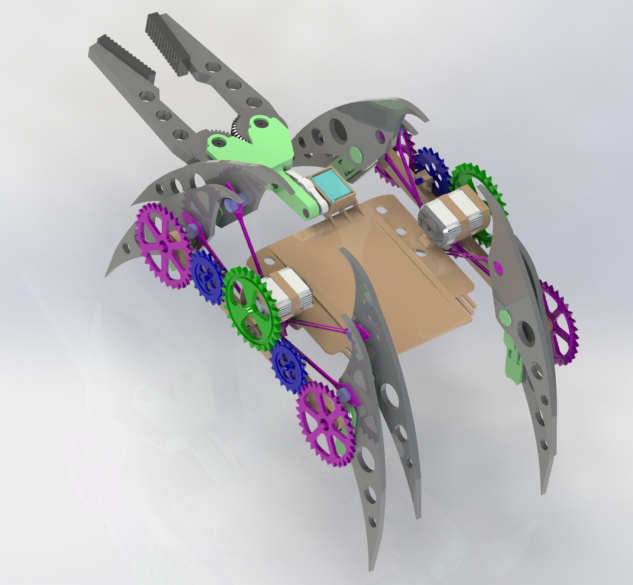
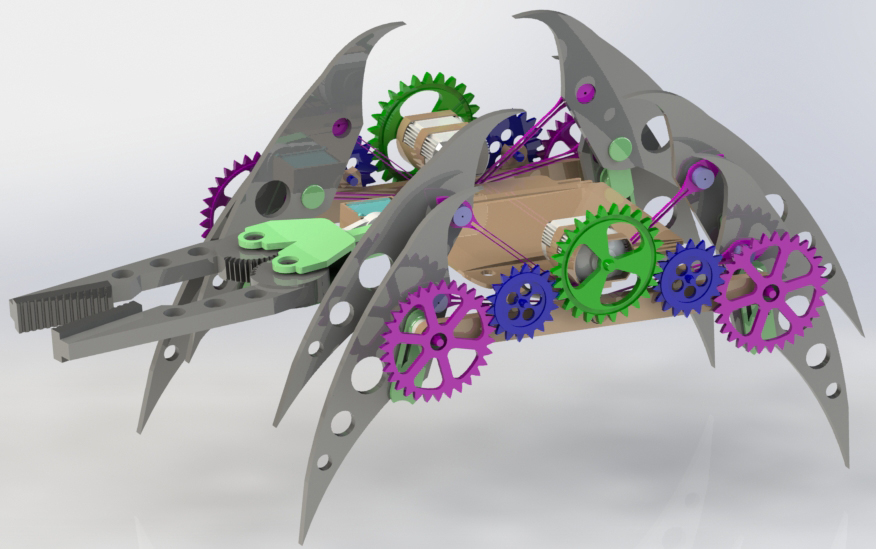
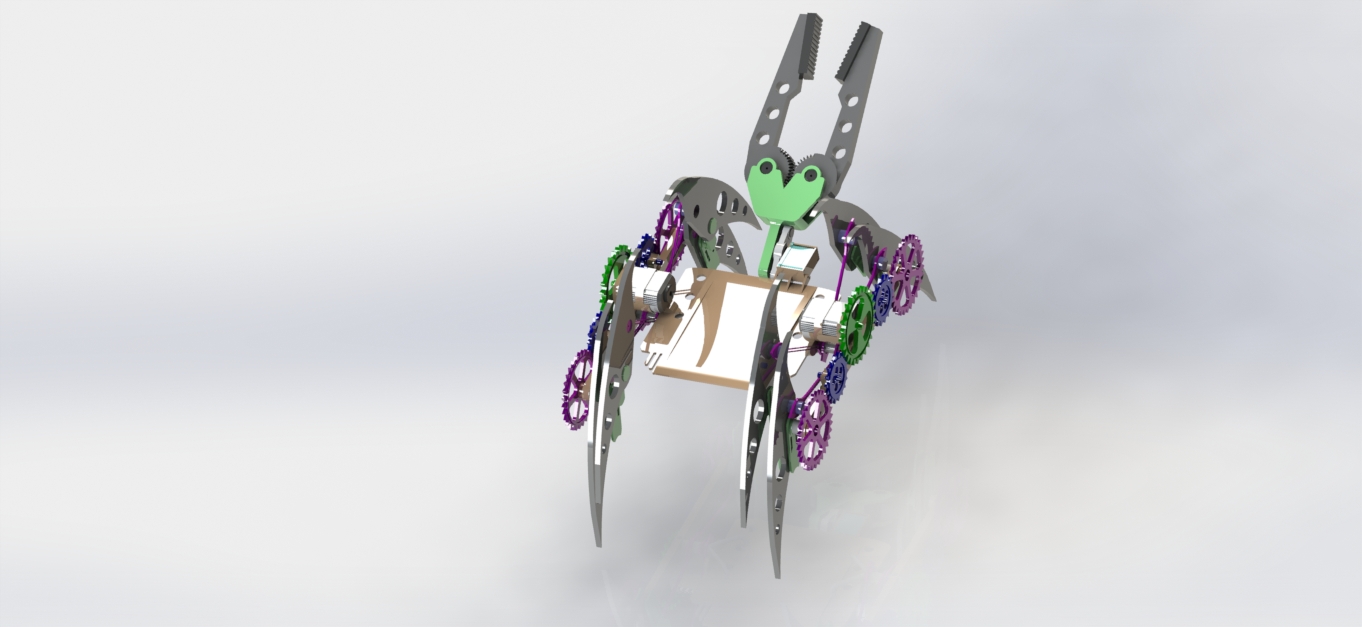
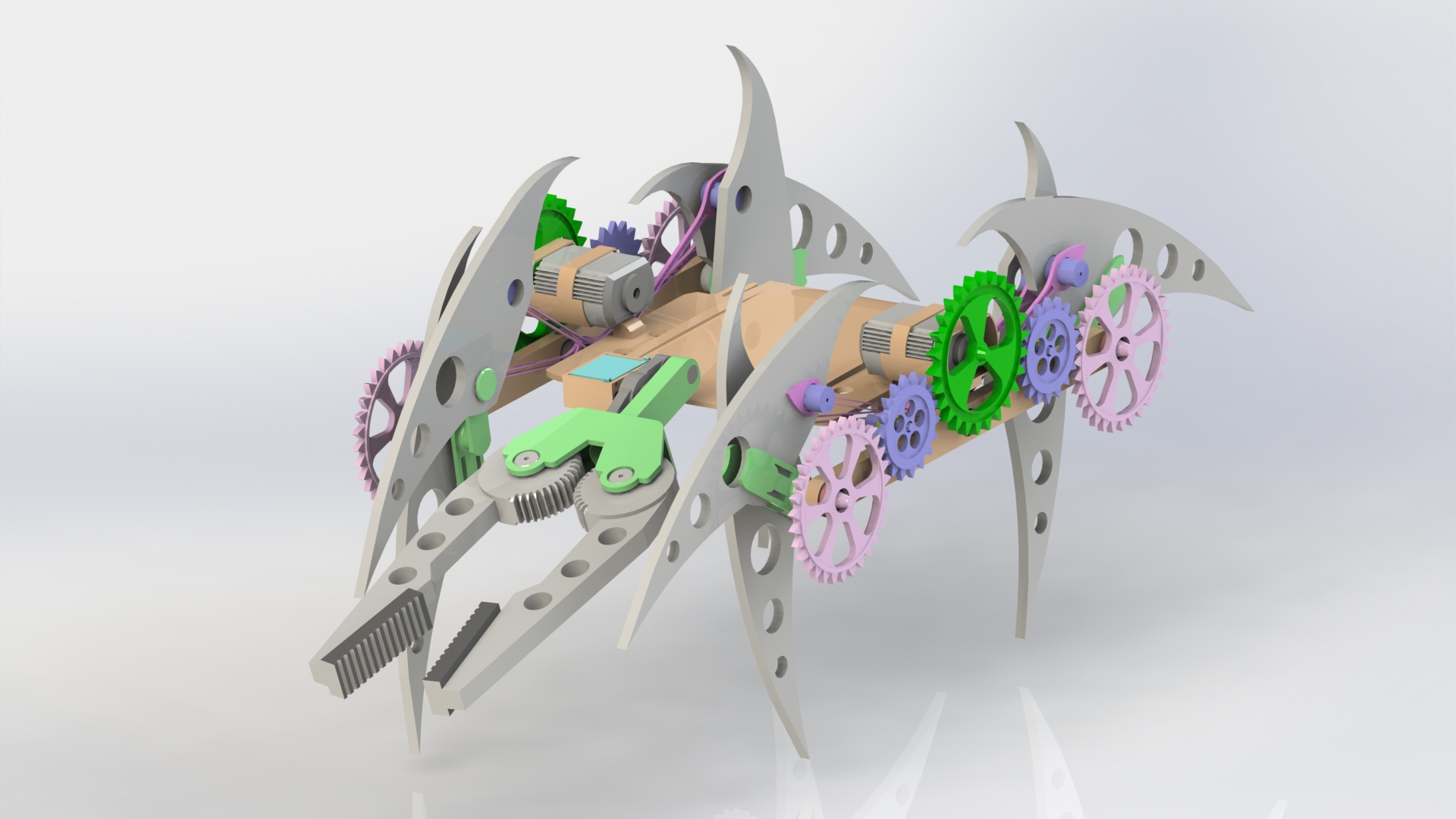
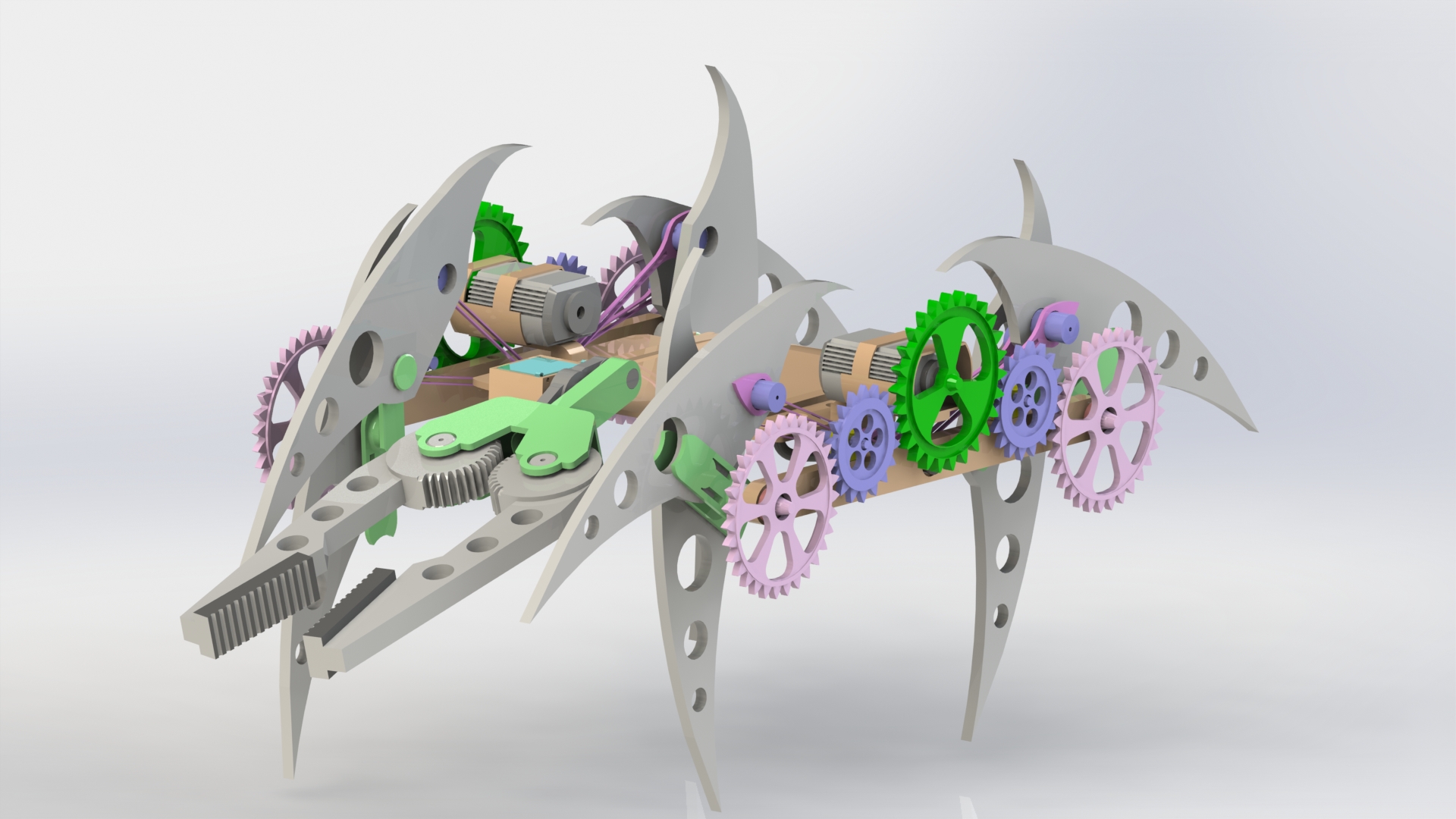
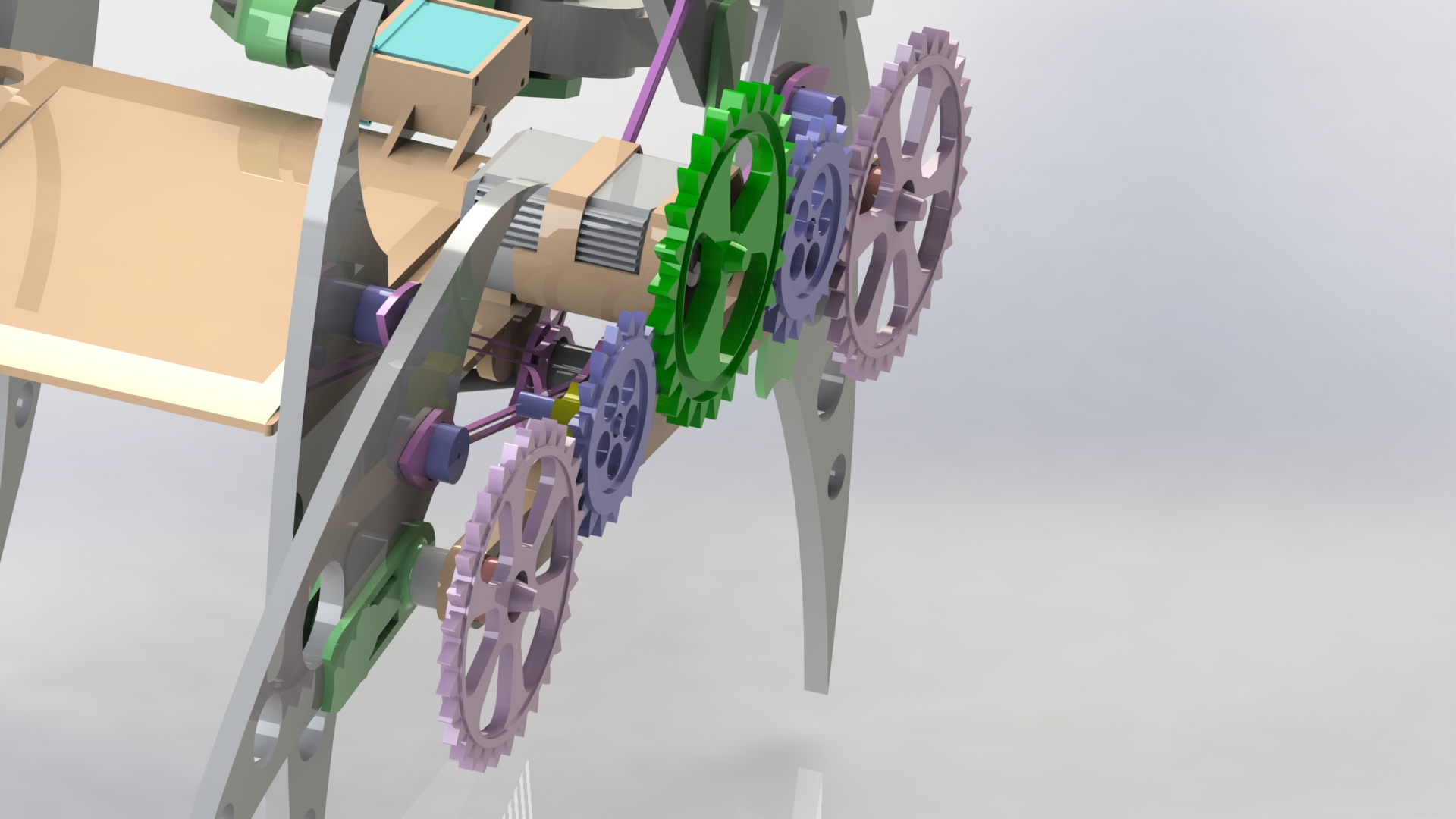
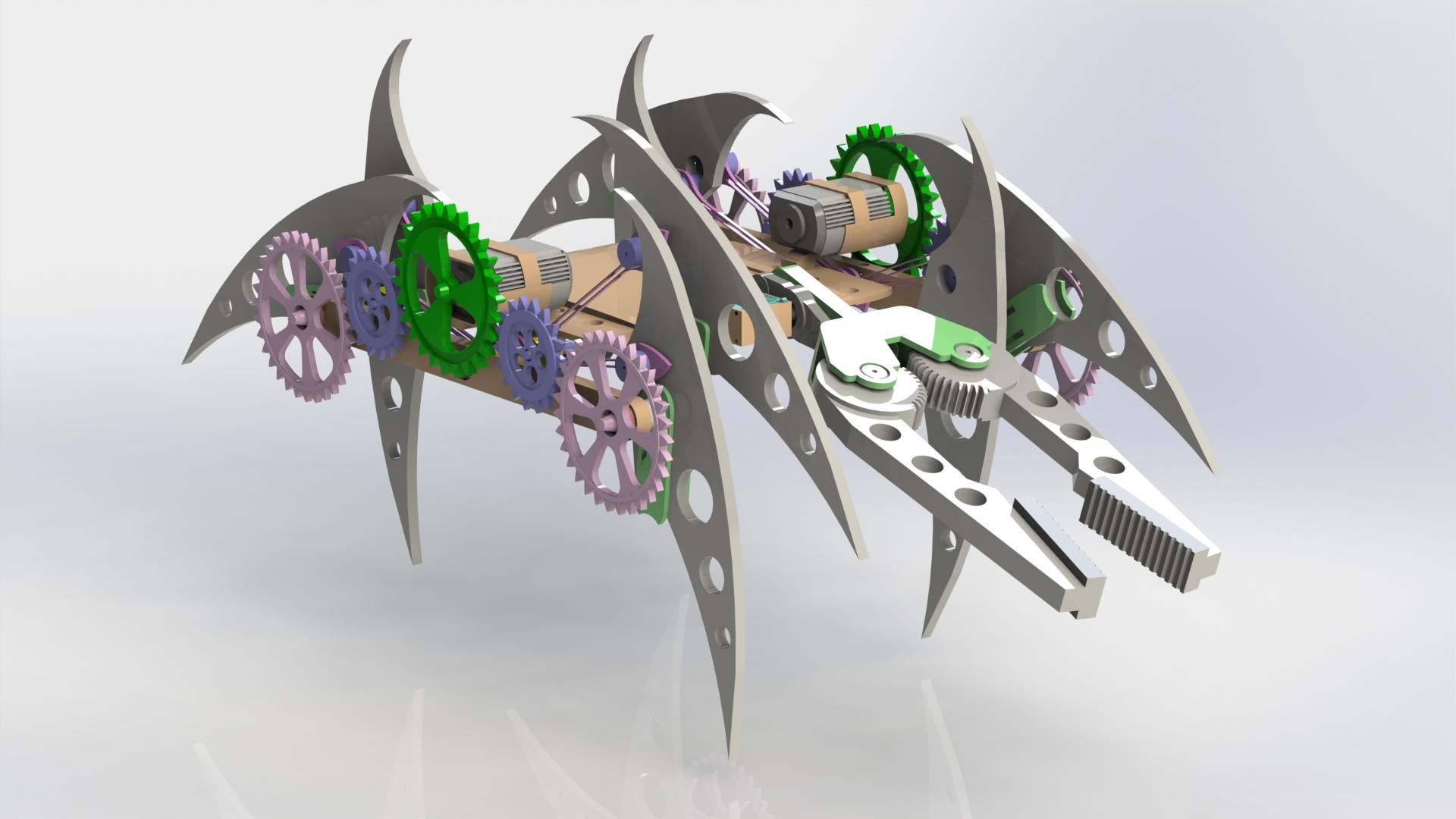
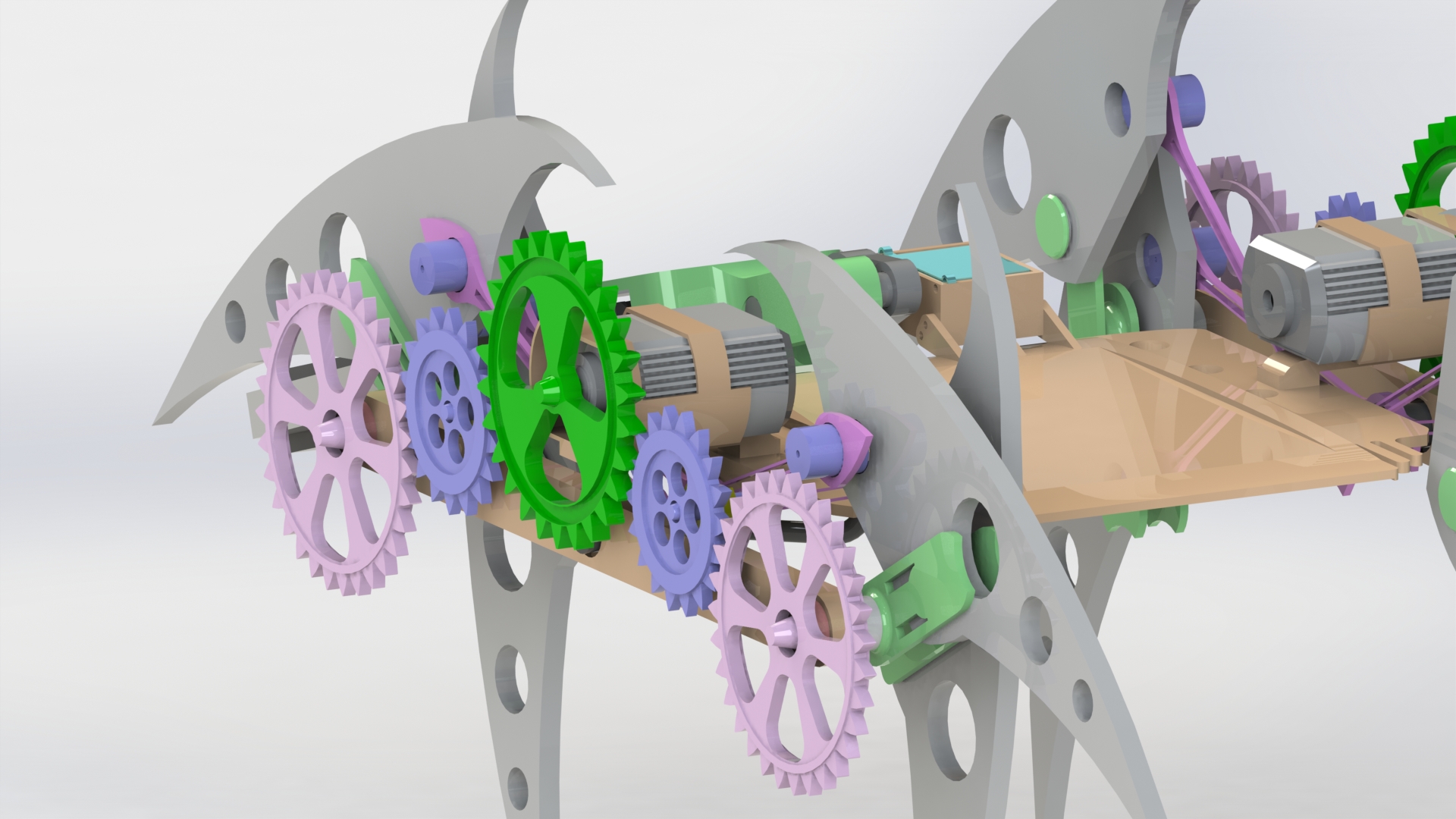
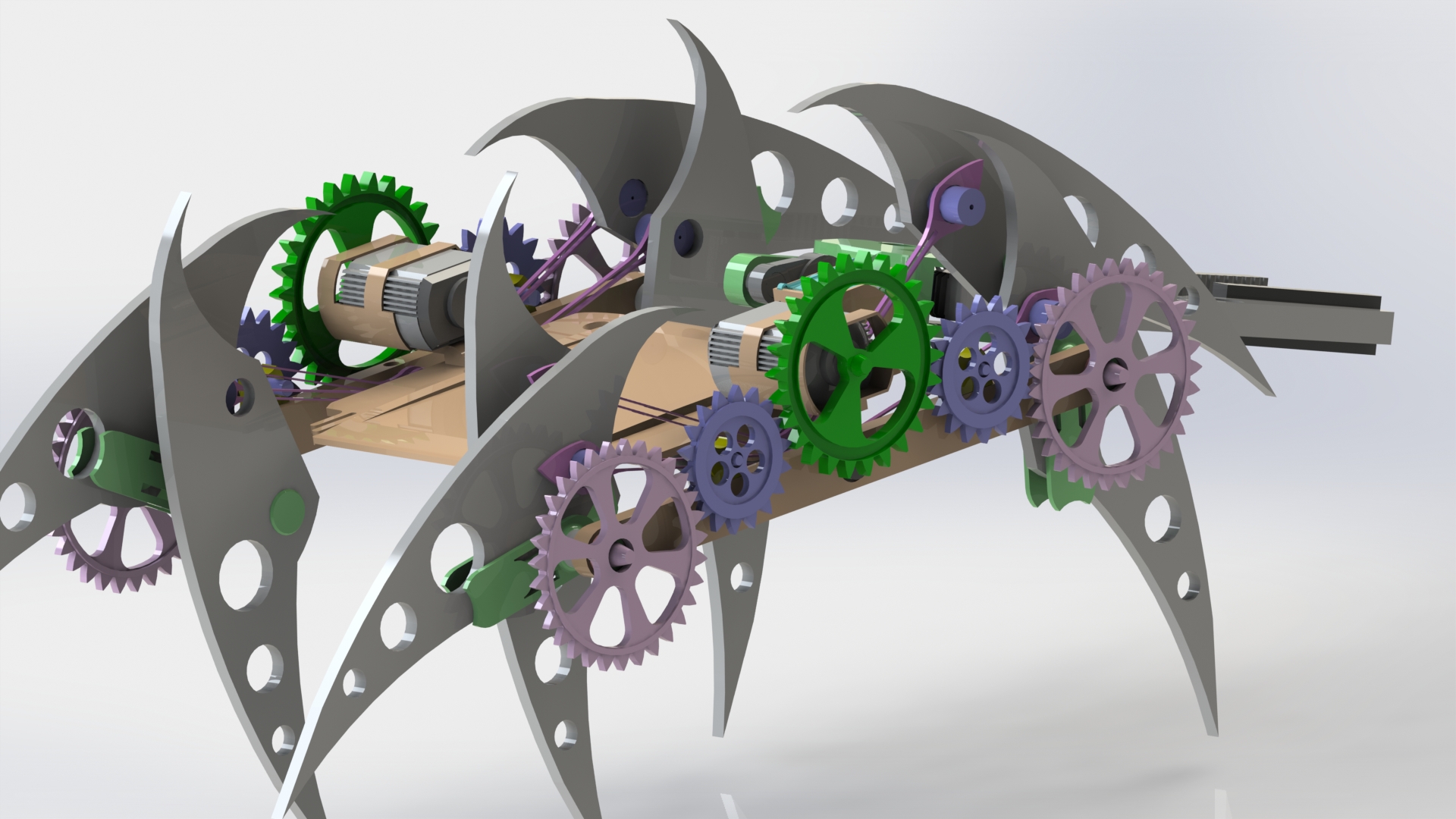
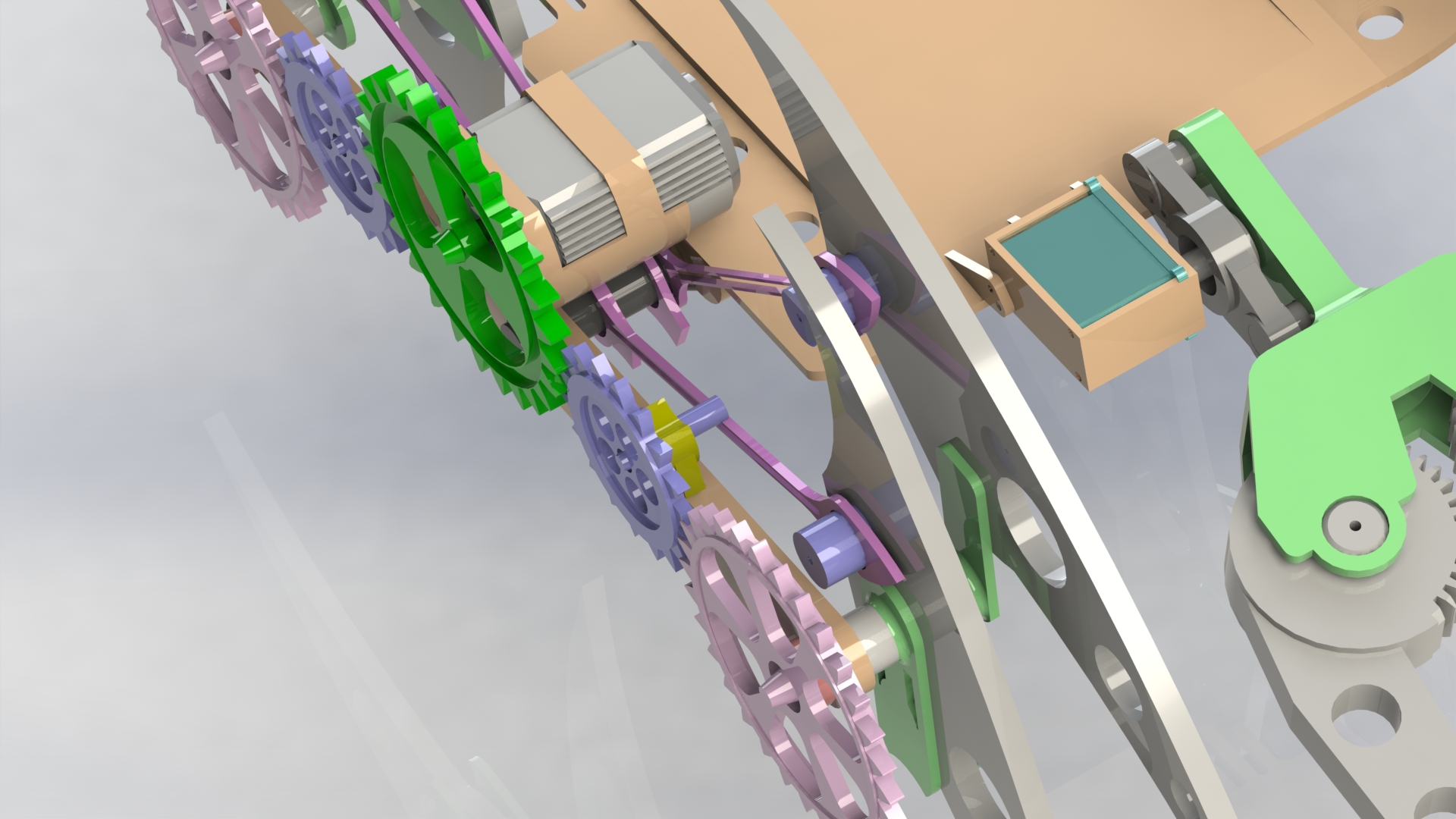
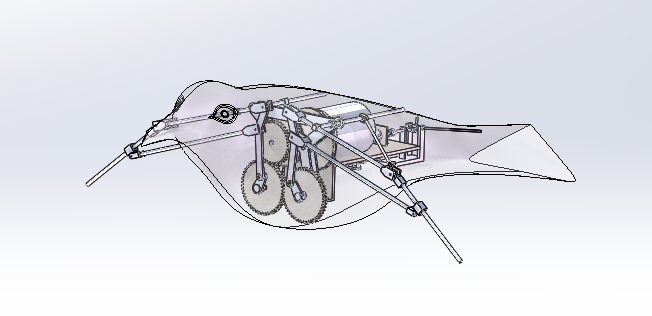
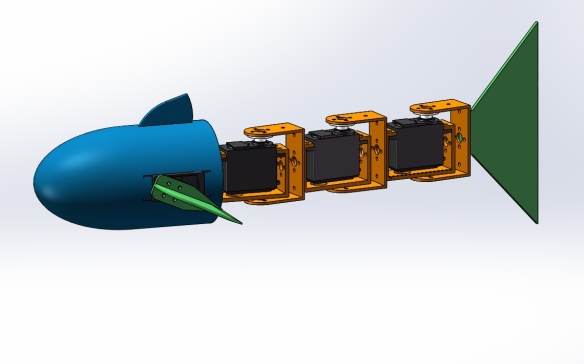
该机器人采用电机驱动,经过多级齿轮传动,最终将电机的回转运动转化为腿部的摆动,通过前后各四条腿分别往复摆动来实现该机器人的行走功能,具有结构简单,传动比恒定,步态准确,易加工制造等优点。
多足步行机器人的运动轨迹是一系列离散的足印运动时只需要离散的点接触地面对环境的破坏程度也较小可以在可能到达的地面上选择最优的支撑点对崎岖地形的适应性强。正因为如此多足步行机器人对环境的破坏程度也较小。多足步行机器人的腿部具有多个自由度使运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平也可以通过调节腿的伸展程度调整重心的位置因此不易翻倒稳定性更高。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多




0_0_364.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)