
登录注册
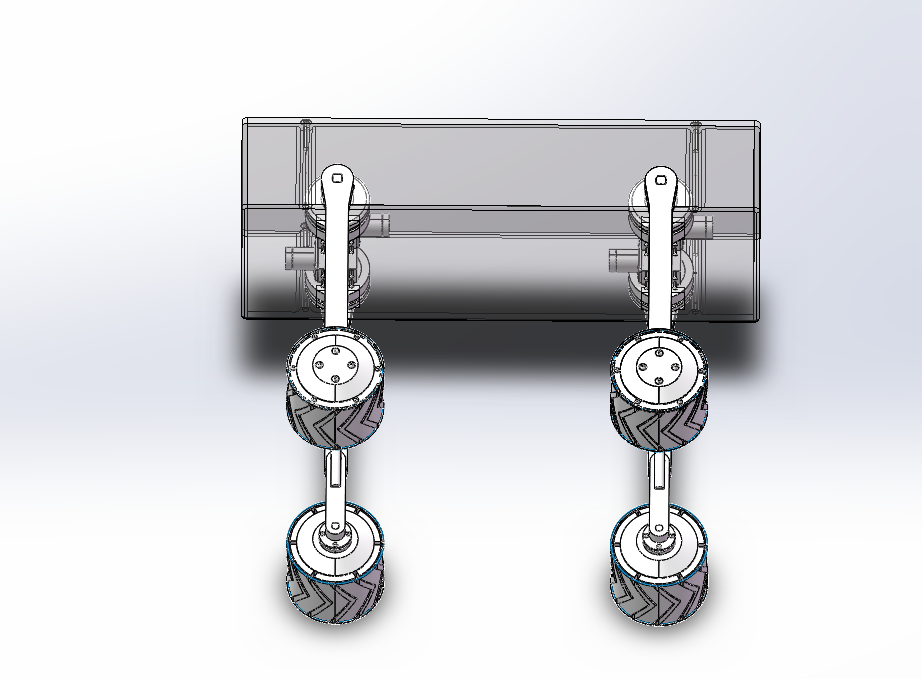
轮足结合式柔性机械腿设计(ID:893537)
截图
AI截图渲染
✨AI图片渲染

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17056426541169.rar | 3.22M |
| 2 | 说明书1.docx | 2.34M |
| 3 | 222.STEP | 6.02M |
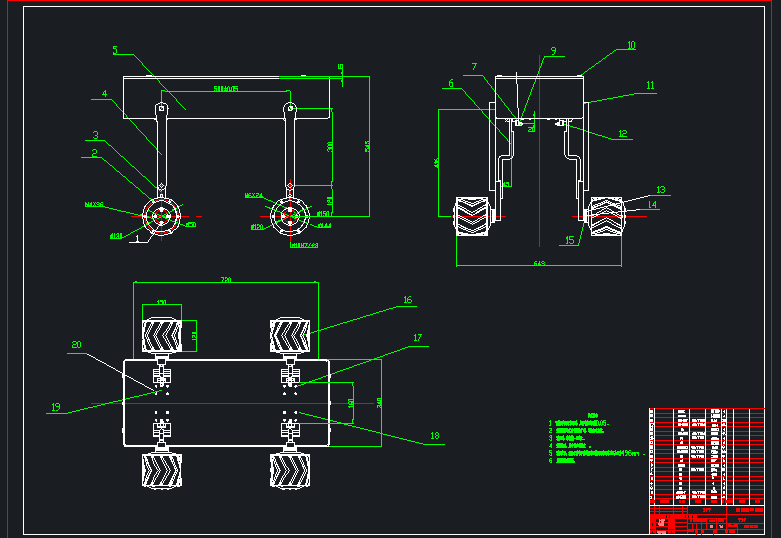
| 4 | A0总装图.dwg | 441.26K |
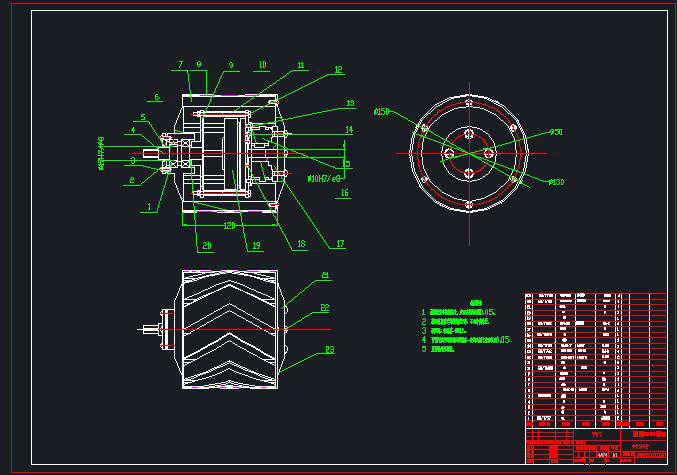
| 5 | A1-车轮装配图.dwg | 282.62K |
| 6 | A1-连杆.dwg | 204.43K |
| 7 | A2-车轮体.dwg | 219.19K |
| 8 | A3-外管.dwg | 214.97K |
| 9 | A3-长臂.dwg | 194.56K |
| 10 | A4-短臂.dwg | 145.80K |
| 11 | A4-车轮轴.dwg | 250.81K |
| 12 | 细化方案图.dwg | 290.43K |
此图纸下载需要340金币
立即下载
发布者
咨询设计Q1587189160
创作: 213
粉丝: 30
加入时间:2024-01-18

模型信息
图纸ID:893537
图纸格式:step,dwg
文件大小:3.3M
所需金币:340
上传时间:2024-01-19 13:37:35
是否可编辑:可修改,包括参数
软件版本:STEP
标签
仿生小车
仿生机械腿
柔性机械腿
轮组结合机械腿
图纸简介
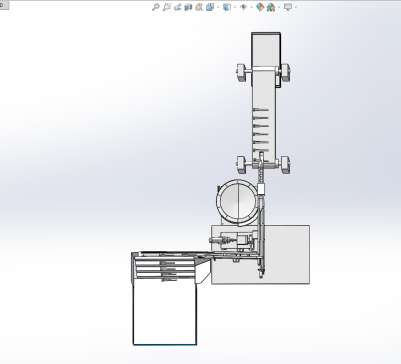
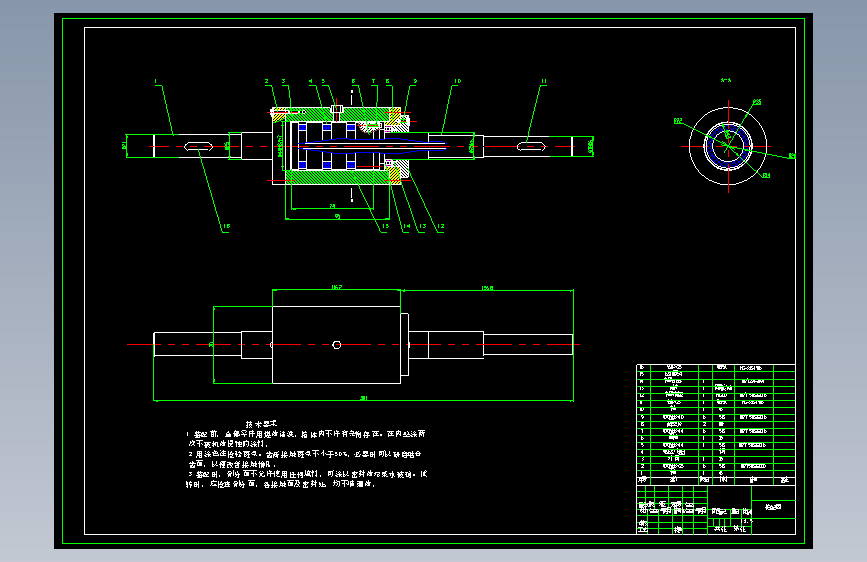
本次了一种能适应不同野外环境的移动机器人,其驱动系统为轮足结合机械式.利用轮足结合机械结合的方式实现越障,具有很强的越障能力.机器人采用四轮足结合机械结构.为了确保四轮足结合机械式移动越障机器人的稳定性,本文对其驱动装置的整体结构进行了深入的研究.,包括对车轮、腿臂、车身等部件的设计,以及对电机、制动器、减速器等部件的选择,并且对机器人的性能和步态进行了详细的分析,最后,在SW设计环境下,对机器人进行装配,以消除干扰,并且验证其结构的准确性.并且在CAD内画出了机构的装配图.
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0_0_364.png)
0_0_364.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

